SCI论文(www.lunwensci.com)
摘要 :软体机器人是一种利用柔软材料制作的新型机器人, 具有无限自由度和连续变形能力 。与传统机器人相比, 软体机器人具 有刚度小 、可变性强 、柔度高的特点, 能较好地适应复杂狭窄或者空间形状不规则的工作环境 。4D 打印技术是在 3D打印技术基 础上增加“时间”维度, 使得打印成型的构件可以接收外部信号刺激发生形状 、性能或功能的改变, 可应用于航空航天 、军事装 备 、 医疗和软体机器人等领域 。介绍了 4D 打印成型智能软体机器人的特点, 给出了其需要 4D打印技术成型的原因 。列出了目前 适用于 4D打印成型软体机器人的几种典型的智能材料并总结了各自的特点与不足, 根据这些智能材料的特性把机器人的驱动方式 分为电驱动 、热驱动 、光驱动以及磁场驱动, 然后介绍了软体机器人的几个典型的应用领域 。最后总结了目前研究中遇到的问题, 对未来发展和应用进行了展望。
A Review on Intelligent Soft Robot Manufactured by 4D Printing
Li Jinwei1. Zhang Mingkang1. Liu Chang1. Yin Sihua1. Wang Di2
( 1. School of Mechanical and Energy Engineering, Guangdong Ocean University, Yangjiang, Guangdong 529500. China;
2. School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641. China)
Abstract: Soft robot is a new kind of robot made of soft materials, which has infinite freedom and continuous deformation ability. Compared with traditional robots, soft robots have the characteristics of low stiffness, high variability, and high flexibility. It can better adapt to complex, narrow, or irregular space-shape working environments. 4D printing technology adds a "time" dimension based on 3D printing technology so that the printed component can receive external signals to stimulate and change shape, performance, or function. It can be applied to aerospace, military equipment, medical treatment, soft robots, and other fields. The characteristics of the 4D printing molding intelligent soft robot and the reasons for the molding with 4D printing technology are introduced. Several typical smart materials applicable to the 4D printing molding soft robot are listed and their characteristics and shortcomings are summarized . According to the characteristics of these intelligent materials, the robot can be divided into electric driven, thermal driven, optical driven, and magnetic driven. Then several typical application fields of the soft robot are introduced. Finally, the problems encountered in the current research are summerized and future development and application are prospected.
Key words: 4D printing; soft robot; smart materials; driving mode; shape memory alloy
0 引言
刚体机器人能够在计算机程序的控制下代替人类完 成各种复杂危险或大量重复的任务, 但他们都是由刚性 材料通过运动副连接构成并由电机驱动, 在地形复杂或 者狭窄空间的环境中灵活性低, 运动能力受限, 且不能 与人或者易碎物体近距离工作[ 1-2] 。基于此问题, 研究人 员观察到自然界中软体动物的组织具有变形大 、质量轻、 功率密度比高等优点, 能在复杂的自然环境下高效运 动[3] 。受此启发, 研究人员开始研究以软体动物为原型 的软体机器人, 例如尺蠖[4-5] 、蚯蚓[6-7] 、海星[8- 10] 、章 鱼[ 11- 12] 和水母[ 13- 14] 等 。软体机器人整体或者大部分由柔性材料制成, 理论上具有无限自由度, 灵活性和安全性较高, 可以适应各种非结构化环境, 与人的交互也会更 为安全[ 15- 16]。
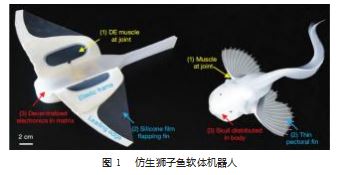
软体机器人在工业生产 、医疗手术 、军事侦查 、深 海作业 、灾区搜救等领域有较大的潜力 。 图 1 所示为浙 江大学的李国瑞等[ 17] 以深海狮子鱼为原型利用介电弹性 体设计制造的一款深海探测软体机器人, 无需耐压外壳。 当施加交流电压时, 介电弹性体产生变形并带动两个鳍 的扑动, 使机器人能够在马里亚纳海沟 10 900 m 深处运 动 。Sun 等[ 18] 使用强钕磁铁 、硼砂和聚乙烯醇等材料混 合制成一个磁驱动黏液机器人, 如图 2 所示 。机器人在 磁场驱动下能够通过狭窄的通道, 并且可以实现抓取固 体物体 、运输有害物品和人体运动监测等多种功能 。
Hawkes 等[ 19] 以植物藤蔓为灵感研发可以“生长”的软体 机器人, 通过尖端增长的方式进行前进, 还可以控制机 器人的增长方向和自动避障, 可用于医疗设备和搜索救 援 。未来软体机器人将成为机器人领域研究发展的一个 热点和重点, 可以解决传统刚体机器人难以解决的问题。
软体机器人的材料并不适用传统的机加工方法, 而 3D 打印技术可以对金属和非金属材料进行逐层推挤黏 结, 叠加成型, 并且当打印材料具有根据外部信号刺激 (如光 、热 、声 、电 、磁等) 变化而发生变形状 、变性能 或者变功能的特点时, 3D 打印就会增加一个“时间”的 维度, 即实现 4D 打印[20] 。这种由智能材料 4D 打印成型 的软体机器人不需要传统刚体机器人复杂的驱动系统和传动结构等, 仅仅通过直接给与外界信号刺激和变化就可 以实现机器人的自主运动, 实现驱动的简单化和高效化。
本文将介绍 4D 打印制造软体机器人所需要的智能材 料以及软体机器人的驱动方式, 再列举几个软体机器人 的典型应用领域, 最后分析目前研究中遇到的问题, 并 对软体机器人未来的发展趋势和研究方向做出展望。
1 智能材料
4D 打印的本质是“3D+时间”,“时间”维度主要体 现在具有形状记忆功能的智能材料上 。 目前的 3D 打印技 术 包 括 主 要 有 熔 融 沉 积 成 型 (Fused Deposition Model⁃ ling, FDM )、 光 固 化 成 型 (Stereo Lithography Appear⁃ ance, SLA )、 数 字 光 处 理 (Digital Light Processing, DLP )、 墨水直写 (Direct Ink Writing, DIW )、 激光选区 烧结 (Selective Laser Sintering, SLS ) 以及激光选区熔 化 (Selective Laser Melting, SLM ) 等[21-22] 。适用 4D 打印 的 智 能 材 料 有 形 状 记 忆 合 金 (Shape Memory Alloy,SMA )、 形 状 记 忆 聚 合 物 (Shape Memory Polymers, SMP )、 形 状 记 忆 水 凝 胶 (Shape Memory Hydrogels, SMH ) 以 及 液 晶 弹 性 体 (Liquid Crystal Elastomer, LCE ) [23-25]等。
1 . 1 形状记忆合金
SMA 是一种智能材料, 可以在外加应力的作用下产 生变形后加热能回复原来的形状, 这种特性称为形状记 忆效应, 其本质是合金的马氏体相与奥氏体相的可逆转 变[26-27], 如图 3 所示。
低温下马氏体相具有去孪晶马氏体和孪晶马氏体两 种变体 。孪晶马氏体在施加应力后会去除孪晶变为去孪 晶马氏体 。当 SMA被加热时, 去孪晶马氏体开始转变为 奥氏体相 。当 SMA被加热超过奥氏体结束温度时, 开始 收缩并转变为奥氏体结构, 恢复原始形状 。结束加热后, 温度开始下降直至马氏体结束温度, 此时合金变回马氏 体相, 这是单向形状记忆效应 。如果变回原施加应力的 状态则为双向形状记忆效应 。为此, 有研究学者利用 SMA 的形状记忆效应作为驱动原理设计制造一系列软体 机器人。
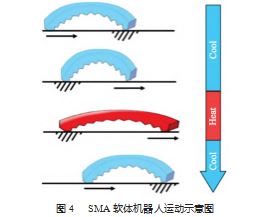
目前以 SMA 驱动的智能软体机器人大都是把 SMA 内 嵌于柔性基体中, 通过焦耳热等方法使 SMA 变形带动机 器人的柔性躯干运动 。例如 Lin 等[28] 介绍了一种受蠕虫 启发的 、磁热驱动的 SMA 软体机器人, 如图 4 所示 。
SMA 骨架在室温下以弯曲形态存在, 加热后伸展, 冷却 后弯曲回到原来的形状 。温度变化是由交变磁场引起的, 并由通过感应线圈的交流电传递 。尽管需要外部电源, 但这种磁感应不需要任何缆绳, 可以做到无约束运动 。 Pan 等[29] 通过 3D 打印硅胶制作一个仿生球形机器人, 并 以 SMA 弹簧作为驱动器 。该机器人通过控制 SMA 弹簧的 加热顺序产生运动的两种运动步态, 实现爬行 、装载、滚动 、躲避障碍物等多种行为 。Patterson 等[30]设计了无 约束的仿生海星软体机器人“PATRICK”, 如图 5 所示。 该机器人将 SMA 弹簧内嵌于由硅橡胶制成的 5 条腿中, 通过热量引起弹簧自由收缩, 带动机器人肢体结构弯曲。 Hwang 等[31]研究了一种基于 SMA 软执行器制成的软体两 栖机器人, 可以模仿海豹在地面爬行和水下运动 。该机 器人由波浪形变形的骨干执行机构和梭形变形的支撑执 行 机 构 组 成, 可 以 集 体 变 形 使 机 器 人 产 生 运 动 。Al⁃ mubarak 等[32]研发了仿生水母机器人, 由 3D 打印的刚性结构和硅胶圆顶构成, 通过 外部电源的电流加热圆顶下 方里面的 4 根 SMA 线产生收 缩-膨胀的循环运动; Soom ⁃ ro 等[33]基于 SMA 和超柔性材 料的多层结构设计了一个名 为 “EXPOG” 的 仿 生 青 蛙 机器人, 利用双推力模仿青蛙运动时的动作实现机器人 的同步游动。
以 SMA 驱动的软体机器人制作成本低 、质量轻 、驱 动方式简单 、驱动力以及驱动位移大 、无噪声 。但是 SMA 材料也有加热温度难以控制, 响应速度具有滞后 性, 运动控制精度不高, 疲劳周期低等缺点, 一般仍然 需要连接外部电源加热 。除此之外, SMA 驱动器一般都 是设计为简单的丝线状 、弹簧 、板状等, 并没有应用 4D 打印实现材料—结构—功能一体化成型的特点。
1 .2 形状记忆聚合物
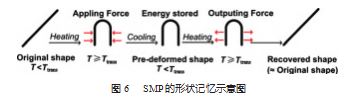
形状记忆聚合物是一种在外界激励条件下能从临时 形状恢复到原始形状的高分子材料 。它同样具有形状记 忆效应, 但与 SMA 不同的是, 它是通过交联来确定永久 形状, 并通过转变温度来固定临时形状[34], 如图 6 所示。 当 SMP 处于转变温度下并施加外力时, 它们的临时形状 可以保持很长时间, 在重新加热后, 其暂时变形的形状 可以恢复到原来的永久形状。
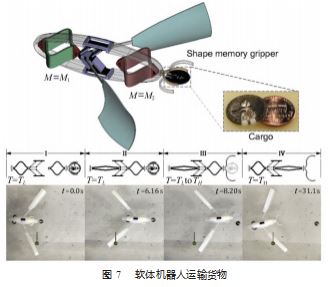
SMP 具有质量轻 、变形大 、易编程 、响应方式多样、 生物相容性好等优点, 是 4D 打印成型智能软体机器人的 主要材料 。如图 7 所示, Chen 等[35] 用 SMP 打印了一个无 约束的游泳机器人 。该机器人利用双稳态驱动推进, 并 对环境温度变化做出响应来控制移动方向 。双稳态元件由 SMP 提供动力, 驱动机器人的鳍实现定向推进, 还可 以自动运输物件并返回起始点。
Invernizzi 等[36] 新开发了一 种具有热响应和自愈合能力的 SMP, 并通过 DLP 技术打印出 来的构件证明了其良好的自愈 合 行 为 和 显 著 的 形 状 记 忆 特 性 。 国立高雄科技大学的 Chen 等[37]利用 SMP 和 FDM 技术打印 了一种轻质海星形状的双层结 构夹持器, 如图 8 所示 。 由于 与导电石墨片结合, 这种夹持 器在电加热和冷却之间表现出 显著的形状变化, 表现出优秀的抓取性能 。Yamamura 等[38] 利用 SMP 和 FDM 技术 4D 打 印一种混合铰链结构, 可以实现自折叠后的弹性变形, 在未来可以应用于开发自折叠式执行器和机器人。
与 SMA 相比, SMP 的制造和编程相对容易, 有较高 的变形率, 在软体机器人方面有广泛的研究与应用 。但 是 SMP 也存在响应时间慢 、回复应力小等问题, 大部分 SMP 的响应速度需要几十秒或几分钟才能达到, 而且在打印后需要进行机械加工以获得变形能力, 未来可以从 材料的改性和结构设计 (双稳态或多稳态结构) 来解决 上述问题[39]。
1 .3 形状记忆水凝胶
形状记忆水凝胶是一种亲水的三维聚合物, 由水和 亲水聚合物链组成网络结构, 它的化学构成如图 9 所示, 聚合物链使水凝胶变成三维弹性固体 。它只要通过永久 交联和具有刺激响应特性的可逆交联来实现形状记忆功 能 。SMH 具有优秀的吸水性 、柔软性和灵活度, 可通过 外部刺激形成或破坏可逆交联来固定临时形状并恢复到 原始形状, 是软体机器人的理想材料之一[40-42]。
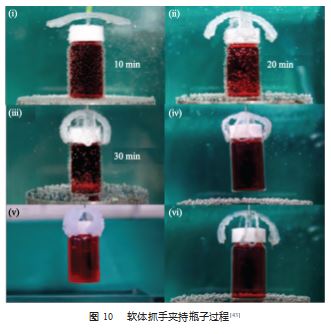
SMH 一般通过热响应驱动, 但也可以通过添加填充 物响应其他信号刺激 。Shiblee 等[43]利用 3D 打印技术制作 了一个双分子层形状记忆水凝胶的软体抓手 。如图 10 所 示, 抓手在水中受热膨胀变形为闭合状态, 准确地夹持、 运输和释放玻璃小瓶 。Wang 等[44]采用飞秒激光直接写入技术 4D 打印成型 pH 响应水凝胶微致动器, 响应速度快, 且可以通过调整 pH 响应策略来调整目标的捕获和释放行 为 。这种微驱动器在软体机器人 、微传感器等研究领域 具有潜在的应用价值 。胡衍雷等[45]也同样利用 FsLDW 技 术 4D 打印 pH 响应仿生植物微尺度水凝胶结构 。通过改 变液体环境的 pH 值, 不仅实现了打印构件的膨胀 、收缩 和扭转等运动变形, 还实现了类似于叶片和花朵的起皱 和卷曲变形行为 。Zhang 等[46]将 Fe3 O4 磁性纳米颗粒内嵌 于水凝胶, 使其具有光加热以及磁场响应的特性 。打印 构件在磁场中可以变形, 还可借助光的照射实现形状恢 复 。Simińska 等[47]4D 打印的磁性水凝胶复合材料构件可 以在磁场中实现滚动, 跳跃和弯曲等运动功能。
SMH 因其高拉伸性 、高透明度 、离子电导性和生物 相容性等, 有望成为软机器人的主要智能材料 。但由于 网络不均匀和高水含量导致其力学性能较弱, 因此, 可 通过一些方法用于提高其力学性能, 包括构建双重网络, 在单一网络中的双重或三重交联等[48]。
1 .4 液晶弹性体
液晶弹性体 ( LCEs ) 是一种结合液晶顺序和橡胶弹 性的轻微交联聚合物, 具有弹性体和液晶相的性质 。它 的驱动原理主要是基于外界刺激 (一般是热响应) 引起 的有序与无序之间的相变, 具有快速刺激响应性 、各向 异性变形 、高弹性和高灵活性, 并且它的形变是完全可 逆的[49-50] 。除此之外, 液晶弹性体可以混合一些特殊材 料 (例如磁性颗粒或者光敏材料) 来增强物理特性并赋 予其额外刺激响应 (例如光 、电和磁响应等) 的特性[51], 是制造软体机器人的一种新材料。
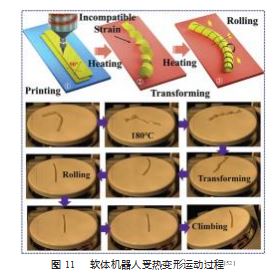
目前, 4D 打印液晶弹性体软机器人已有重大进展。 图 11 所示为天津大学的封伟等[52] 采用 DIW 技术 4D 打印 液晶弹性体成型的热响应智能机器人, 当机器人加热到 160 ℃以上后变形为管状, 可实现无约束的自由滚动, 由小管的曲率方向控制, 能够探测前方道路障碍物, 并自主实现翻越或折返等行为 。此外, 机器人还能爬上大 约 20°的斜坡, 机器人中空部分还能承载 40 倍自重的负 载 。Xiao 等[53]使用液晶网格结构和聚酰亚胺组成的双层 结构驱动器打印了一个名为“Janus”软体机器人, 电阻 丝镶嵌在驱动器中 。当电流刺激时, 电阻丝产生热量引 起液晶弹性体的相变, 从而实现驱动器的大幅度可逆形 变 。该机器人可以完成多种运动模式, 包括身体拱起和 拉直前进 、双足行走或者四足爬行等。
Wang 等[54] 提出了一种基于 DIW 技术打印功能梯度 LCE 的方法, 即通过设置特定的打印参数可打印出来按 照预定设计进行形变的智能 LCE 结构, 并通过打印花瓣 形状的智能变形结构来展示新方法的打印效果; Saed 等[55]采用双硫醇-烯反应方法合成了一类液晶弹性体, 它 可以被 4D 打印成型复杂的形状, 能够对热刺激做出响应 并且表现为可控的形状变化 。东南大学的 Liu 等[56] 通过 将一种多刺激响应性四芳基琥珀腈发色基团引入到液晶 弹性体网络中, 不仅在热和机械压缩作用下表现出可逆 的形状变形和变色行为, 而且具有良好的自愈合 、重编 程和循环特性 。他们以此材料制作了一个海星状执行器, 可以模拟海星的形状变形 、爬行运动 、刺激响应的颜色 变化 、以及自修复功能。
尽管液晶弹性体具有大变形且可逆 、快速响应以及 优异的各向异性, 是制造软体机器人的一种优秀材料, 但本身也存在制备成本较高 、力学性能和耐疲劳性较差 等缺点[57] 。通过一定的方法改善和提升液晶弹性体的性 能对软体机器人的应用具有重大意义。
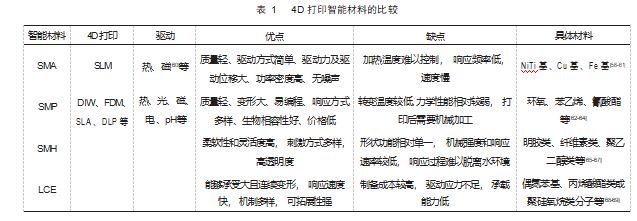
表 1 总结了目前软体机器人常用智能材料的 4D 打印 方法, 驱动方式, 比较了各种材料的特性并列举各种智 能材料里面常用的材料。
2 驱动方式及其原理
传统机器人的驱动一般都是通过电机带动齿轮组或 者皮带轮等传动机构把动力输出到运动端, 但 4D 打印成 型的软体机器人是根据智能材料受到信号刺激而发生变 形的特性产生可控连续的运动, 不需要复杂的驱动系统和传动结构 。一般而言, 智能材料可以感受的激励信号 包括电 、热 、光 、磁场等, 并且有些材料还可以对多种 信号的组合做出响应[70-71]。
2.1 电响应驱动
电信号刺激是软体机器人较为常见的一种驱动方式, 可以通过直接调节电流大小, 实现机器人的精确控制。电 信号驱动大致可以分为两种, 一种是利用焦耳热刺激智能 材料发生变形, 因此也可以归类为热响应驱动。另一种则是 依据智能材料的固有特性, 将电信号转化为物理或化学反 应。例如介电弹性体 (Dielectric Elastomer, DE )、 电活性 水凝胶 (Electroactive Hydrogels, EAH )、 离子聚合物-金 属复合材料 (Ionic Polymer-Metal Composites, IPMC ) 等。
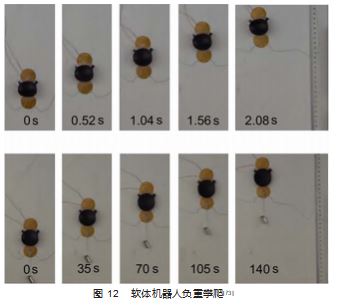
电响应驱动具有操作简单和出色的可控性的优势, 基于静电驱动设计的软体机器人, Cao 等[72]设计了由 DE 驱动器驱动的可变形体和两只脚组成的机器人, 通过可 变形身体的交替扩张和收缩实现类似尺蠖的蠕动, 运动 速度达到 0.02 体长/s 。Gu 等[73]也同样利用 DE 制作了仿尺 蠖软体机器人, 但它可以利用静电吸附脚掌在墙壁上垂 直爬升, 如图 12 所示, 可以在携带一定重物的情况下完成爬壁任务, 还可以多个机器人协同作业 。Ji 等[74] 制作 了使用低压堆叠介电弹性体致动器驱动的昆虫软体机器 人, 当施加电压时, 致动器膨胀带动腿部向前运动, 关 闭电压时收缩并依靠腿部与地面接触的摩擦力拖动身体 向前运动 。另外, 该机器人可以携带其体重 5 倍的有效 载荷, 并具备一定的环境感知能力, 能够实现自主运动。 电信号驱动方式操作简单, 刺激信号稳定, 可控性强, 可长时间远距离工作 。但目前大多数电驱动软体机 器人都需要连接外部电源工作, 对机器人的灵活性有一 定影响, 难以用于无约束软体机器人。
2.2 热响应驱动
热响应驱动是典型的驱动方式之一, 由于其控制手 段简便, 且可与其他信号 (例如光热效应 、磁热效应和 电热效应等) 相互转换而被广泛应用。
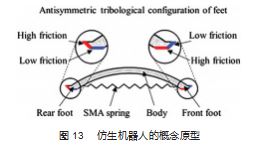
目前大部分智能材料均可以对温度的变化作出响应。 对于热响应驱动, 常见的方法是直接对材料加热, 也有 利用电阻丝间接加热 。西安交通大学的 Wang等[75]使用连 续纤维复合材料 4D 打印一种具有自决策能力的温度响应 双稳态软跳跃机器人, 其结构由变形区和储能区组成, 可以实现不同的跳跃模式 (包括正向 、旋转 、横向和翻 转) 以及运动模式, 通过在周期性温度刺激下实现反复 跳跃 。Liang 等[76]用形状记忆合金弹簧和热塑性聚氨酯弹 性体制造了一个简易的软体机器人, 如图 13 所示 。该机 器人将躯干和脚集成在一个整体的弯曲结构中, 通过对 弹簧线圈的脉冲电流加热使其与弹性躯体由伸展状态变 为压缩状态, 断电后弹性躯体储存的弹性势能释放, 产 生仿蠕虫的爬行运动。
Wu等[77]提出了一种新的双晶热驱动器设计, 由银纳 米线/聚二甲基硅氧烷复合材料制成, 在加热时会发生弯 曲, 可用于在软机器人设备中实现快速运动, 并用图 14 所示的快速移动的软爬行机器人和仿生金星捕蝇器演示 了双晶热驱动器的可用性 。Liu等[78]开发了一种由两层主 动网格和一层被动网格构成的结构 。其中主动层网格已 嵌入热电阻丝的液晶弹性体, 可在通电加热时收缩, 并 带动中间层被动网格的屈曲变形 。该结构可以通过调节输入到上下两层主动网格的电流自由变换曲率, 形成各 类曲面形状。
但是, 热响应驱动也存在加热过程产生能量耗损, 加热温度难以精确控制, 材料响应速度相对于其他信号 刺激较慢等问题。
2.3 光响应驱动
光响应驱动具有远程控制 、响应迅速 、控制精度高 等特点 。光驱动材料通常是在硅胶 、液晶弹性体等聚合 物中添加对光比较敏感的填充物来形成, 在光照的情况 下可以产生可逆变形 。改变光的波长 、强度和照射时间 等可以精确致动。
Wang 等[79]将金纳米颗粒作为光热转换器与丙烯酸酯 基结合, 形成由光激活的, 具有可调转变温度的 SMP。 通过特定波长的光进行远程照射, 当温度达到聚合物的 玻璃化温度时光能被转化为热能, 从而使形状发生转变。 Yin 等[80]制作了一个受光驱使的水凝胶仿生水母机器人, 如图 15 所示 。在可见光的驱动下, 机器人以 65.72 °/s 的速度弯曲并且以 3.37 mm/s 的最大速度移动 。除了游 泳之外, 机器人还可以实现行走和跳跃等运动模式 。 Zhao 等[81]发明了一个名为“OsciBot”的软体机器人, 它 由一种对光敏感的水凝胶制成, 通过依靠外部恒定的光 源产生振动来推动前进, 机器人移动的方向可以通过改 变光源来决定。
光响应驱动可以进行长距离无耗损传输, 稳定性强, 不受导线限制 。 因此光驱动软体机器人的运动更灵活、 更自由, 运动范围更广泛 。但对于一些无光源的黑暗环 境较难利用光作为刺激信号, 并且光的穿透力较差, 对 软体机器人的材料要求具有较高的透明度, 可以接受光 信号。
2.4 磁响应驱动
磁响应驱动方式也是目前软体机器人应用较多的方 法之一, 大部分是通过将磁性颗粒 (如钕铁硼, Fe3O4 等) 与软性基质混合, 在磁场的作用下, 磁性粒子可以 被磁化, 产生方向和幅值可变的磁化曲线 。当将磁响应 材料置身磁场中时, 空间中的磁场将和磁性粒子相互作 用, 使磁性粒子的磁场和空间磁场对齐, 从而产生扭矩, 导致收缩 、伸长和弯曲等变形 。磁响应驱动器可以实现 无缆驱动, 是在狭小空间下作业的理想选择, 特别是医 疗行业, 被广泛用在微型无拴机器人中。
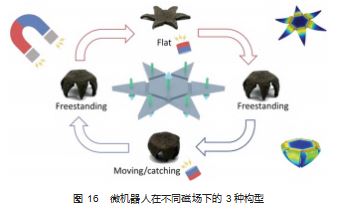
针对磁响应驱动的方式, Sun 等[82]利用水凝胶 3D 打 印具有关节结构的磁性软微型机器人, 基本的变形单元 是一根带关节的梁, 关节可以将弯曲变形转化为折叠变 形并且区域局部变形 。该机器人可以完成如移动 、翻转、 捕捉 、携带和释放等任务, 图 16 所示为机器人在不同磁 场作用下的 3 种结构: 展开 、站立和抓取 。Zhu 等[83]使用 一种新的方法来编程不同尺寸结构的磁各向异性, 并且 使用 DIW 技术以及复合磁性油墨 4D 打印了软爬行机器 人 、柔性抓手等对其新方法进行验证, 所生产的结构可 以对机械刺激和磁场都有反应 。Roh 等[84]研究了一种新 型的用同质复合硅胶毛细管油墨 3D 打印制造的智能弹性 体结构, 其驱动原理是施加在嵌入硅胶中的羰基铁颗粒 上的磁力以及横向毛细力而变形 。它在水面上漂浮时可 以对外加磁场刺激做出响应实现复杂的重构和形状变化。
磁驱动具有响应灵敏 、远程控制 、安全无害等特点。 尽管磁场可以穿透大部分的材料, 但难以适用磁场强度 较弱的自然环境, 一般需要人为搭建磁场, 并通过改变 磁场的强度和方向等控制软体机器人的运动。
2.5 多刺激响应驱动
单一的刺激响应方式已经满足不了人们对软体机器 人更高的要求, 也限制了软体机器人的应用范围。多信号 刺激响应可以使软体机器人的驱动方式多样化, 具有更高 的灵敏性, 使机器人能在环境发生变化时自主切换驱动方 式, 可以更好地完成任务 。但对材料的性能要求会更高。
Hu 等[85] 使用一种由 N-异丙基丙烯酰胺单体 、纳米 黏土和钕铁硼磁性颗粒组成的新型磁性温敏智能水凝 胶, 并通过 4D打印成型磁热双响应的贝类机器人和水 母机器人等 。双层薄膜结构的驱动单元可以实现热场中 不同振幅的弯曲变形 。该机器人在外部磁场的驱动下完 成各种形式运动, 并在人胃模型中演示了货物夹紧和释 放, 展示了良好的力学性能 、可加工性和生物相容性 。 Ambulo 等[86] 开发了一种由液晶弹性体基体和共晶镓-铟 合金液滴组成的 4D 打印复合材料, 这种材料打印出来的 构件能够实现光热和电热双响应驱动。
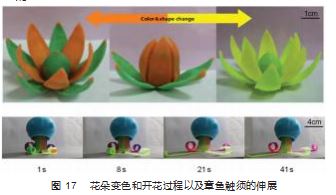
吉林大学的王京春等[87] 与曼切斯特大学合作, 通过 聚乳酸和热致变色颜料的结合, 制备了形状-颜色双响 应性复合材料, 通过 FDM 技术打印颜色可变化的花朵和 伪装的章鱼, 如图 17 所示 。章鱼触须可以在温度变化时, 以不同的速度伸展, 并产生协调的颜色变化 。仿生 花朵可以在外界温度变化时开花和变色 。这种材料在将 来有望应用于军事侦察领域 。Li 等[88]研发一个可感受光 和磁双驱动的软体机器人, 由镍纳米线与光活性水凝胶 基质结合的复合材料制成, 在光的照射下从平面状态变 为弯曲状态 。当机器人处于旋转磁场中时, 可以在平面 或倾斜表面上快速行走, 并通过滚动运动和光驱动的形 状变化来引导货物的运送等功能 。因此, 该机器人具有 高精确度的移动性和敏捷性。
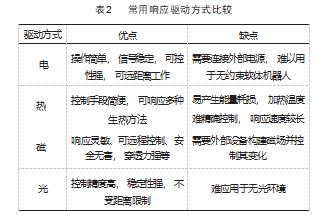
表 2总结了目前软体机器人常用驱动方式的优缺点。 除此之外, 研究学者也开发了可以对湿度[89-91] 、pH[92-93] 值等其他信号作出响应的软体机器人或者智能结构, 但 并没有其他驱动响应方式应用得广泛, 例如湿度响应不 能用于干燥环境, pH 响应只能用于液体环境, 这些条件 限制了他们的进一步发展。
3 应用前景
软体机器人的特点使得它的应用范围广泛, 例如在 航空航天 、医疗手术 、军事侦查 、深海作业 、灾区搜救 等, 具有良好的应用前景。
3.1 生物医疗
软体机器人在生物医学应用中具有无限的潜力, 可 以用于外科手术 、临床诊断 、药物传递 、术后康复 、人 工假体和器官等[94] 。人体器官组织大都比较脆弱, 传统 的医疗机器人若控制不当有可能会对人体造成不适 。但 软体机器人因其具有柔软可变 、灵活小巧的特点, 可以 安全地在人体内运输药物, 进行临床诊断和微创手术等, 即使在误操作的情况下也不会对人体造成伤害 。此外, 柔性材料的杨氏模量与人体肌腱性差不大, 在力学性能、 运动和功能方面模拟人体组织, 在康复辅助设备方面可 以提供给病人良好的保护。
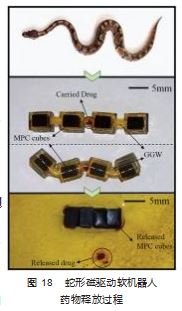
在医疗领域, 软体机器人的驱动主要以磁场为主, 例如 Wang 等[95]设计制造了一种具有生物相容性和可溶解 组件的蛇形磁驱动软机器人, 由 4 个磁性立方体 (由硅橡胶与铁磁粒子混合制成) 通过可降解混合物制成的链接连接起来,链接在温水中会逐渐溶解并释放出模拟药物 。与此同时, 磁性立方体就会被相互吸引, 形成一个磁性软棒, 在旋转磁场的影响下实现蛇状运动, 如图 18 所示 。香港 城 市 大 学 的 Zhang等[96]3D 打印一个毫米级软体连续机器人, 该机器人表面涂覆了一层嵌入铁颗粒的弹性体皮肤层, 可 以 在 磁 场 中 响应, 拥有优秀转向能力和精确跟踪的性能, 在临床手 术方 面 具 有 潜 在 应 用, 如 微 注 射 、 消 融 和 鼻 咽 取 样 等 。Ze 等[97]报告了一种具有平面内收缩的磁驱动小型折 纸爬行器, 磁驱动用于提供适当的扭矩分布, 使机器人 具有爬行和转向能力, 并利用机器人的内腔用于药物的 储存和释放 。Kuang 等[98] 研发了一种新型油墨, 通过紫 外线辅助使用 DIW 技术打印了具有形状记忆和自愈合 功能的可拉伸弹性体, 可应用于血管修复等医用领域 。 Xie 等[99]研制了一种具有快速运动响应和精确定位的仿生 磁性微机器人, 通过磁场控制来释放和释放溶栓药物, 可用于靶向溶栓。
人体的结构极为复杂, 对软体机器人的运动控制和 响应速度要求较高, 且要求材料无毒无害, 高弹性和良 好的生物相容性等特性, 同时还要满足在外界刺激下做 出快速驱动响应, 适用于 4D 打印的智能材料数量有 限[ 100] 。这需要研究人员对材料科学 、机械工程和生物医 学工程进行全面深入的研究, 以开发一个制造和实现 4D 软体机器人的技术方案
3.2 航天航空
太空是真空 、高寒和强辐射的环境, 需要依赖机器 人或者机器手帮助宇航员完成出舱维修 、行星探索 、捕 获空间碎片和废弃卫星等任务 。但太空垃圾是以轨道速 度运行 ( 7 km/s 以上), 机械手在捕抓过程中与高速移动 的空间碎片碰撞后极易出现损伤, 可能会严重损坏运作 中的航天器, 甚至解体[ 101] 。天体表面的地形复杂, 轮式 行星车受限于功率能耗和地形影响, 需要对行走路线提 前规划和控制速度, 否则可能会陷进坑里 。但软体机器 人具有高灵活性 、可变形性和能量吸收特性等特点, 对 太空环境具有较强的适应性, 在航空航天领域具有重要 的应用价值。
然而, 目前针对软体机器人在太空环境工作的研究 较少 。东华大学的 Liu 等[ 102]采用光驱动 SMP 通过光焊接 实现快速组装具有多功能和可自愈的软机器人 。他们在 聚乙烯-醋酸乙烯酯中加入银纳米线, 利用光热反应实 现光照驱动 。执行不同的任务时可将装置从机器人主体 上切割下来, 然后再用光焊接把另一个编程组装上去, 即可实现功能 。材料的自愈合功能还可以帮助机器人实 现自我修复, 防止机器人执行任务时受损, 延长使用寿 命 。 图 19 所示为 SMP 3D 组装一个可局部或整体重新配 置和重新编程软体机器人, 并在光照下形成一个青蛙机 器人 。Naclerio 等[ 103] 提出了一种藤蔓状软体机器人, 主 体部分选用了较为光滑的软管, 用气体来驱动机器人前 进 。机器人在尖端上加了水平和垂直的两个空气喷流装 置, 克服了地下挖掘面临的阻力和升力, 在干燥沙土中 以 4.8 m/s 的速度打洞, 还可以 360°灵活转向 。未来可以在行星天体上克服太空低重力环境, 固定在介质中挖洞 提取深层土壤样品或者进行地下勘探等。
尽管软体机器人技术航空航天方面具有良好的应用 前景, 但仍需解决解决机器人在运动 、控制 、寿命等方 面存在的问题, 因为在太空环境中软体机器人需要高度 可靠性, 寿命长, 并能够适应恶劣的空间环境 。此外, 机器人为了满足任务要求, 需要把包括驱动 、传感和计 算等功能的电子元件整体嵌入柔性材料基体中, 保护其 不受太空中辐射的影响[ 104]。
3.3 海洋作业
水下机器人被广泛应用于海底勘探, 水质监测, 水 下作业 、样本收集等任务 。但是因为压强和信号问题, 机器人的作业深度和时间有限, 并且需要电缆进行持续 的远程操作, 在运动范围上存在一定的限制 。此外, 对 于一些脆弱的海洋样本, 如珊瑚礁和海洋生物等, 不宜 使用刚性机器手来收集, 因为它们很容易被机器手损 坏[ 105] 。但软体机器人可以为这些问题提供解决方案, 因 为柔性材料的耐压性好, 且软体机器人的结构简单, 不 需要耐压的外壳和密封舱等, 这足以支持机器人往更深 的海域进行探索开发任务, 在收集样本时也可以避免对 海洋生物造成伤害。
海洋生物为软体机器人提供了很好的仿生对象 。Wu 等[ 106]模仿章鱼触手并借助 3D 打印和模铸技术制造一个 新型软钳, 它具有较好的能力抓取任何形状和尺寸的物 体并具有触觉感知能力, 能够区分不同尺寸和形状的物 体, 展示了其在复杂水下环境中的巨大应用潜力 。受蝠 鲼的启发, Li 等[ 107]设计了一种软体机器鱼, 由介电弹性 体和离子导电水凝胶制成的软电活性结构驱动, 利用周 围的水作为电极 。其近乎透明的特性可用于水下探测侦 查和海洋生物监测等 。Christianson 等[ 108]利用介电弹性体 设计了一个仿生鳗鱼软体机器人, 分别使用腔体内液和 环境中的水作为电极, 通过电路板在水中传递负电荷, 并激活内腔中的正电荷导致弹性体弯曲, 从而在水下游 泳 。半透明和静音的特点使得机器人能抵近观察鱼类,但目前电路板是浮在水面的, 导致机器人尚且不能进行 水下探索任务。
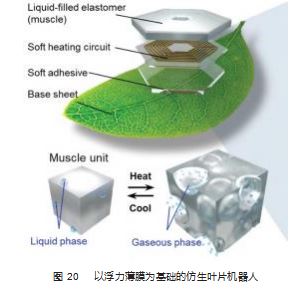
除此以外, Byun 等[ 109] 以树叶为灵感开发一个水下软 体机器人, 可以在水中实现类似树叶在空中飘落的上下 游动, 如图 20 所示 。机器人分为浮力薄膜和树叶状基板 两部分, 其中浮力薄膜由一个充满液体的弹性体和一个 柔软的加热电路组成 。加热时弹性体中的液体转变为气 体, 使弹性体的体积发生变化从而改变其密度, 产生浮 动 。但该机器人在湍流中的运动比较不稳定, 需要进一 步解决流动水中的稳定性问题 。机器人可以对周围污染 环境进行修复, 例如吸附漏油和清理水下塑料碎片。
软体机器人质轻的特点使得它在水下运动时很容易 受到暗流的影响, 该问题仍待解决 。此外, 在浅层软体 机器人可以通过光照或者内部电路驱动, 但是当水深达 到一定程度后会没有光, 所以机器人需要内嵌于软性材 料的电路来驱动, 例如介电性弹性体或者形状记忆合金 等, 又或者可以开发能够对压强作出响应的特殊材料 。 4 目前的问题智能软体机器人作为机器人领域的一门新兴学科, 尽管已经取得了较大的研究进展, 但仍然有一些问题亟 待研究并解决。
( 1 ) 目前 4D 打印成型软体机器人大部分只能实现单 一的前进爬行 、弯曲 、跳跃等动作, 还不能做出复杂动 作, 并且运动速度较慢, 尚不能满足实际应用中在复杂 环境下完成任务。
( 2 ) 软体机器人的驱动方式大部分还是基于智能柔 性材料的单一刺激而做出的响应变形, 未来可以研究双 重或多重刺激信号的驱动方式, 或者对不同刺激信号的 组合能做出相应的动作, 并且对不同信号频率或者强度 做出不同的动作, 实现机器人更高的智能化 、多样化。
( 3 ) 智能材料在反复的变形中会降低疲劳寿命, 特 别是形状记忆合金, 发生疲劳失效断裂或者响应速度变 慢等问题 。所以提高智能机器人的工作寿命和鲁棒性等 性能尤为重要。
( 4 ) 目前软体机器人的智能化程度不够, 只是依赖材 料本身的特殊性能, 未来应该结合柔性传感器或者柔性驱 动器等柔性电子元件, 内嵌于机器人中, 实现更高的智能。
( 5 ) 智能材料在接受刺激时大都只是单一的变形, 而 4D 打印智能构件还应具有变性能或者变功能的两个可 控变化 。因此, 未来的研究可以尝试把变形与其他两种 一起实现, 即在变形的同时实现变性能或变功能。
5 总结与展望
4D 打印一体化成型智能软体机器人的研究涉及到机 械 、材料 、控制 、编程等多方面学科的融合, 从打印材 料的选择 、运动结构的设计 、信号响应的驱动以及控制 反馈机制均存在许多问题需要深入研究 。4D 打印技术与 软体机器人的结合的目的是直接制造成型具有智能功能 的, 可快速响应驱动的, 结构简单化 、轻便化的机器人, 弥补传统刚性机器人在灵活性 、安全性等方面的不足 。 软体机器人的高效制造和精确控制是未来发展和研究的 方向, 这不仅需要对 4D 打印的工艺 、材料 、装备等进 行更深入的研究, 满足变形 、变性或变功能的需求, 也 需要适用于软体机器人的传感控制方案和柔性电子技术 作为支撑。
总体而言, 4D 打印软体机器人目前还处于实验研究 阶段, 还不能够广泛应用于实际中的生产活动和生活服 务 。要真正实现类似软体动物的灵活运动, 还需要不断 提高机器人的智能化 、高柔性化 、多功能化。
参考文献:
[ 1] Whitesides G M. Soft robotics [J]. Angewandte Chemie-Interna ⁃ tional Edition,2018.57( 16): 4258-4273.
[2] Kim S,LaschI C,Trimmer B. Soft robotics: a bioinspired evolution in robotics [J]. Trends in Biotechnology,2013.31(5): 287-294.
[3] 唐海峰,何斌,王志鹏 . 软体机器人研究综述 [J]. 同济大学学报 (自然科学版),2014.42( 10): 1596- 1603.
[4] Xie D,Liu J,Kang R,et al. Fully 3D-printed modular pipe-climb ⁃ ing robot [J]. IEEE Robotics and Automation Letters, 2021. 6(2):462-469.
[5] Joyee E B,Pan Y. A Fully Three-dimensional printed inchworm- inspired soft robot with magnetic actuation [J]. Soft Robotics, 2019.6(3): 333-345.
[6] Tang Z, Lu J, Wang Z, et al. Development of a new multi-cavity pneumatic-driven earthworm-like soft robot [J]. Robotica, 2020. 38( 12): 2290-2304.
[7] Ge J Z, CALDERÓN A A, Chang L, et al. An earthworm-inspired friction-controlled soft robot capable of bidirectional locomotion[J]. Bioinspiration & Biomimetics,2019. 14(3): 036004.
[8] Bell M A, Weaver J C, Wood R J. An Ambidextrous STarfish-In ⁃ spired Exploration and Reconnaissance Robot (The ASTER-bot) [J]. Soft Robotics,2021.9(5): 991- 1000.
[9] Yang X, Tan R, Lu H J, et al. Starfish Inspired Milli Soft Robot With Omnidirectional Adaptive Locomotion Ability [J]. IEEE Ro ⁃ botics And Automation Letters,2021.6(2): 3325-3332.
[ 10] Jin H,Dong E B,Alici G,et al. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires [J]. Bioin ⁃ spiration & Biomimetics,2016. 11(5): 056012.
[ 11] Zatopa A,Walker S, Menguc Y. Fully soft 3D-printed electroac ⁃ tive fluidic valve for soft hydraulic robots [J]. Soft Robotics, 2018.5(3): 258-271.
[ 12] Cianchetti M,Calisti M,Margheri L,et al. Bioinspired locomotion and grasping in water: the soft eight-arm OCTOPUS robot [J]. Bioinspiration & Biomimetics,2015. 10(3): 035003.
[ 13] Cruz Ulloa C,Terrile S,Barrientos A. Soft underwater robot actu ⁃ ated by shape-memory alloys "JellyRobcib" for path tracking through fuzzy visual control [J]. Applied Sciences,2020. 10(20) :7160.
[ 14] Takishima Y, Yoshida K, KhoslA A, et al. Fully 3D-printed hy⁃ drogel actuator for jellyfish soft robots [J]. ECS Journal of Solid State Science and Technology,2021. 10(3): 037002.
[ 15] 曹玉君, 尚建忠, 梁科山,等 . 软体机器人研究现状综述 [J]. 机 械工程学报,2012.48(3): 25-33.
[ 16] 王永青,邓建辉,李特,等 . 软体机器人 3D打印制造技术研究 综述 [J]. 机械工程学报,2021.57( 15): 186- 198.
[ 17] Li G R,Chen X P,Zhou F H,et al. Self-powered soft robot in the Mariana Trench [J]. Nature,2021.591(7848): 66-71.
[ 18] Sun M, Tian C, Mao L, et al. Reconfigurable magnetic slime ro ⁃ bot: deformation, adaptability, and multifunction [J]. Advanced Functional Materials,2022.32(26): 2112508.
[ 19] Hawkes E W, Blumenschein L H, Greer J D, et al. A soft robot that navigates its environment through growth [J]. Science Ro ⁃ botics,2017.2(8): eaan3028.
[20] 史玉升,伍宏志, 闫春泽,等 . 4D 打印—— 智能构件的增材制 造技术 [J]. 机械工程学报,2020.56( 15): 1-25.
[21] Wallin T J,Pikul J,Shepherd R F. 3D printing of soft robotic sys⁃ tems [J]. Nature Reviews Materials,2018.3(6): 84- 100.
[22] Rastogi P, Kandasubramanian B. Breakthrough in the printing tactics for stimuli-responsive materials : 4D printing [J]. Chemi⁃cal Engineering Journal,2019.366: 264-304.
[23] Shen Z Q,Chen F F,Zhu X Y,et al. Stimuli-responsive function⁃ al materials for soft robotics [J]. Journal of Materials Chemistry B,2020.8(39): 8972-8991.
[24] Gul J Z,Sajid M,Rehman M M,et al. 3D printing for soft robotics - a review [J]. Science And Technology of Advanced Materials, 2018. 19( 1): 243-262.
[25] Kim J,Kim J W,Kim H C,et al. Review of soft actuator materials [J]. International Journal of Precision Engineering And Manufac ⁃ turing,2019.20( 12): 2221-2241.
[60] 闫海乐,黄晓明,杨波,等 .NiMnIn 基磁致形状记忆合金晶体学 研究进展[J]. 中国材料进展,2021.40( 12):996- 1006.
[61] 杨建楠,黄彬,谷小军,等 . 形状记忆合金力学行为与应用综述 [J]. 固体力学学报,2021.42(4):345-375.
[62] 李丰丰,刘彦菊,冷劲松 . 形状记忆聚合物及其复合材料在航 天领域的应用进展[J]. 宇航学报,2020.41(6):697-706.
[63] 魏洪秋, 万雪, 刘彦菊,等 . 4D 打印形状记忆聚合物材料的研 究现状与应用前景 [J]. 中国科学:技术科学,2018.48( 1): 2- 16.
[64] 王林林,冷劲松,杜善义 .4D 打印形状记忆聚合物及其复合材 料的研究现状和应用进展[J]. 哈尔滨工业大学学报,2020.52 (6):227-244.
[65] 陈晨,周天乐, 陈双琴,等 . 纤维素水凝胶在柔性电子皮肤设备 中的研究进展[J]. 微纳电子技术,2022.59(7):607-616.
[66] 师文钊,邢建伟,刘瑾姝,等 . 聚乙二醇基形状记忆高分子材料 研究进展[J]. 高分子材料科学与工程,2018.34(4): 152- 158.
[67] 刘瑞雪,周腾, 樊晓敏,等 . 明胶基复合水凝胶研究进展[J]. 轻 工学报,2018.33(6):42-54.
[68] 李婉冰, 汪春学, 张海波,等 . 光响应偶氮苯基液晶弹性体的制 备及其应用研究进展[J]. 现代化工,2022.42(3): 11- 15.
[69] 陆海峰,王猛,黄帅,等 . 环氧液晶弹性体材料的制备与力学性 能研究[J]. 高分子学报,2021.52(3):304-311.
[70] 张忠强, 邹娇, 丁建宁,等 . 软体机器人驱动研究现状 [J]. 机器 人,2018.40(5): 648-659.
[71] 王田苗,郝雨飞,杨兴帮,等 . 软体机器人 : 结构 、驱动 、传感 与控制 [J]. 机械工程学报,2017.53( 13): 1- 13.
[72] Cao J, Qin L, Liu J, et al. Untethered soft robot capable of stable locomotion using soft electrostatic actuators [J]. Extreme Me ⁃chanics Letters,2018.21: 9- 16.
[73] Gu G,Zou J,Zhao R,et al. Soft wall-climbing robots [J]. Science Robotics,2018.3(25): eaat2874.
[74] Ji X, Liu X, Cacucciolo V, et al. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer ac ⁃ tuators [J]. Science Robotics,2019.4: eaaz6451.
[75] Wang Q,Tian X, Li D. Multimodal soft jumping robot with self- decision ability [J]. Smart Materials and Structures, 2021. 30(8):085038.
[76] Liang C,Wang Y,Yao T, et al. A shape memory alloy – actuated soft crawling robot based on adaptive differential friction and en ⁃ hanced antagonistic configuration [J]. Journal of Intelligent Ma⁃ terial Systems and Structures,2020.31( 16): 1920- 1934.
[77] Wu S, Baker G L, Yin J, et al. Fast thermal actuators for soft ro ⁃ botics[J]. Soft Robotics,2022.9(6): 1031- 1039.
[78] Liu K, Hacker F,Daraio C. Robotic surfaces with reversible,spa⁃ tiotemporal control for shape morphing and object manipulation [J]. Science Robotics,2021.6(53): eabf5116.
[79] Wang Y,Sachyani Keneth E,Kamyshny A,et al. 4D multimateri⁃ al printing of programmable and selective light-activated shape-memory structures with embedded gold nanoparticles [J]. Advanced Materials Technologies,2021.7(5): 2101058.
[80] Yin C,Wei F,Fu S,et al. Visible light-driven jellyfish-like min ⁃ iature swimming soft robot [J]. ACS Applied Materials & Inter⁃faces,2021. 13(39): 47147-4754.
[81] Zhao Y,Xuan C,Qian X,et al. Soft phototactic swimmer based on self-sustained hydrogel oscillator [J]. Science Robotics, 2019. 4 (33): eaax7112.
[82] Sun B,Jia R,Yang H,et al. Magnetic arthropod millirobots fabri ⁃ cated by 3D-printed hydrogels [J]. Advanced Intelligent Sys ⁃ tems,2022.4( 1): 2100139.
[83] Zhu H,He Y,Wang Y,et al. Mechanically-guided 4D printing of magnetoresponsive soft materials across different length scale [J]. Advanced Intelligent Systems,2022.4(3): 2100137.
[84] Roh S, Okello L B, Golbasi N, et al. 3D-printed silicone soft ar⁃ chitectures with programmed magneto-capillary reconfiguration [J]. Advanced Materials Technologies,2019.4(4): 1800528.
[85] Hu X, Ge Z,Wang X, et al. Multifunctional thermo-magnetically actuated hybrid soft millirobot based on 4D printing [J]. Com ⁃posites Part B: Engineering,2022.228: 109451.
[86] Ambulo C P,Ford M J,Searles K,et al. 4D-printable liquid metal– liquid crystal elastomer composites [J]. ACS Applied Materi⁃ als & Interfaces,2021. 13( 11): 12805- 12813.
[87] Wang J, Wang Z, Song Z, et al. Biomimetic shape-color double- responsive 4D printing [J]. Advanced Materials Technologies, 2019.4(9): 1900293.
[88] Li C,Lau G C,Yuan H,et al. Fast and programmable locomotion of hydrogel-metal hybrids under light and magnetic fields [J]. Science Robotics,2020.5(49): eabb9822.
[89] Fu L, Zhao W, Ma J, et al. A humidity-powered soft robot with fast rolling locomotion [J]. Research,2022:9832901.
[90] Gao X H, Zhang L, Wang S T, et al. Soft untethered robots and grippers based on humidity-gated magnetic-responsive film ac ⁃ tuators [J]. ACS Applied Polymer Materials, 2021. 3(9): 4726-4734.
[91] Sarikaya S,Gardea F,Strong H,et al. Tunable actuation of humid ⁃ ity-driven artificial muscles via graphene nanofillers [J]. ACS Applied Polymer Materials,2022.4( 12): 8803-8811.
[92] Fusi G, Del Giudice D, Skarsetz O, et al. Autonomous soft robots empowered by chemical reaction networks [J]. Advanced Materi⁃ als,2022: 2209870.
[93] Tang Q, Lai W, Wang P P, et al. Multi-mode reconfigurable DNA-based chemical reaction circuits for soft matter comput⁃ ing and control [J]. Angewandte Chemie-International Edition, 2021.60(27): 15013- 15019.
[94] Cianchetti M, Laschi C, Menciassi A, et al. Biomedical applica⁃ tions of soft robotics [J]. Nature Reviews Materials, 2018. 3(6):143- 153.
[95] Wang C, Puranam V R, Misra S, et al. A snake-inspired multi- segmented magnetic soft robot towards medical applications [J]. IEEE Robotics and Automation Letters,2022.7(2): 5795-5802.
[96] Zhang T,Yang L,Yang X, et al. Millimeter-scale soft continuum robots for large-angle and high-precision manipulation by hy ⁃ brid actuation [J]. Advanced Intelligent Systems, 2021. 3(2):2000189.
[97] Ze Q, Wu S, Nishikawa J, et al. Soft robotic origami crawler [J]. Science Advances,2022.8( 13): eabm7834.
[98] Kuang X, Chen K,Dunn C K,et al. 3D printing of highly stretch⁃ able, shape-memory, and self-healing elastomer toward novel 4D printing [J]. ACS Applied Materials & Interfaces, 2018. 10 (8): 7381-7388.
[99] Xie M,Zhang W, FAN C, et al. Bioinspired soft microrobots with precise magneto-collective control for microvascular thromboly ⁃ sis [J]. Advanced Materials,2020.32(26):2000366.
[ 100] Bajpai A, BaigenT A, Raghav S, et al. 4D printing: materials, technologies,and future applications in thebiomedical field [J]. Sustainability,2020. 12(24): 10628.
[ 101] 岳晓奎, 张滕 . 在轨服务软体机器人应用展望 [J]. 飞控与探 测,2020.3( 1): 7.
[ 102] Liu M X,Zhu S,Huang Y J,et al. A self-healing composite actu ⁃ ator for multifunctional soft robot via photo-welding [J]. Com ⁃posites Part B-Engineering,2021.214: 108748.
[ 103] Naclerio N D, Karsai A, Murray-Cooper M, et al. Controlling subterranean forces enables a fast, steerable, burrowing soft ro⁃ bot [J]. Science Robotics,2021.6(55): eabe2922.
[ 104] Jing Z, Qiao L, Pan H, et al. An overview of the configuration and manipulation of soft robotics for on-orbit servicing [J]. Sci⁃ence China-Information Sciences,2017.60(5): 1- 19.
[ 105] Youssef S M,Soliman M,Saleh M A,et al. Underwater soft robot ⁃ ics: a review of bioinspiration in design, actuation, modeling, and control [J]. Micromachines,2022. 13( 1): 110.
[ 106] WU M,ZHENG X,LIU R,et al. Glowing sucker octopus (stauro⁃ teuthis syrtensis) -inspired soft robotic gripper for underwater self-adaptive grasping and sensing [J]. Advanced Science, 2022.9( 17): 2104382.
[ 107] Li T, Li G, Liang Y, et al. Fast-moving soft electronic fish [J]. Science Advances,2017.3(4): e 1602045.
[ 108] Christianson C, Goldberg N N, Deheyn D D, et al. Translucent soft robots driven by frameless fluid electrode dielectric elasto ⁃ mer actuators [J]. Science Robotics,2018.3( 17): eaat 1893.
[ 109] Byun J,Park M,Baek S-M,et al. Underwater maneuvering of ro⁃ botic sheets through buoyancy-mediated active flutter [J]. Sci⁃ ence Robotics,2021.6(53): eabe0637.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63844.html