SCI论文(www.lunwensci.com)
摘要:针对传统人工巡检缺乏实时性与准确性的缺点,设计一套基于视觉分析的智能化轨道巡检系统。在巡检梁的不同位置安装视觉组件,利用三维测量、视觉检测等技术对轨道及扣件进行实时图像采集;通过拼接多个位置视觉组件采集的视觉数据,得到采集区域的二维灰度数据和三维立体数据。将该数据与车辆速度、位置等信息相结合,通过深度学习、大数据分析等技术,实现对轨道病害空间上与时间上的准确定位。与传统的安装在巡检车辆上的巡检系统相比,所设计的车载轨道智能巡检系统可安装在运营车辆上,在车辆运营的同时实现对轨道病害的边检边报。结果表明:所设计的系统可实时、准确定位病害的位置与里程信息,轨道病害检出率可达到90%以上;该系统通过5G上传与数据云处理等技术,实现了数据在线与离线的可视化处理。
关键词:轨道巡检;三维测量;视觉检测;大数据分析;可视化处理
Design of Intelligent Inspection System for On-board Rails of Urban Rail Vehicles
Wang Kunpeng,Zhao Xinying,Wang Yuting,Liu Haitao,Zhou Yang
(CRRC Qingdao Sifang Locomotive&Rolling Stock Co.,Ltd.,Qingdao,Shandong 266111,China)
Abstract:Aiming at the shortcomings of lack of real-time and accuracy of traditional manual inspection,an intelligent track inspection system based on visual analysis was designed.The vision components were installed at different positions of the inspection beam,and 3D measurement,visual inspection and other technologies were used to collect real-time images of tracks and fasteners;by stitching the visual data collected through multiple location vision components,the two-dimensional grayscale data and the three-dimensional stereoscopic data of the acquisition area were obtained.The data were combined with vehicle speed,location and other information,and through deep learning,big data analysis and other technologies,the accurate positioning of track diseases in space and time could be achieved.Compared with the traditional inspection system installed on the inspection vehicle,the developed on-board rail intelligent inspection system can be installed on the operating vehicle,and the inspection and reporting of track diseases can be realized while the vehicle is running.The results show that by using the designed system,the location and mileage information of the disease can be located in real time and accurately,and the detection rate of rail diseases can reach more than 90%;in the system,through 5G upload and data cloud processing and other technologies,the visualization of data online and offline can be realized.
Key words:track inspection;3D measurement;vision inspection;big data analytics;visualization processing
0引言
轨道状态检查是及时发现病害、保证铁路运输安全性和可靠性的重要手段之一。在自然环境和机车车辆长年累月的作用下,铁路线路会发生轨道几何尺寸变化、钢轨表面擦伤和内部伤损、路基道床变形、扣件丢失或偏移等多种病害问题[1-2]。我国城市轨道交通快速发展,北京、上海、成都等城市轨道交通开通里程已逾越500 km,传统的巡检方式已难以满足轨道交通日益增长的维护需求。城市轨道交通通车里程的快速增长,对轨道状态检查的效率与准确性提出了更高的要求。
目前,我国城市轨道交通轨道状态检查主要采用人工巡检与车辆巡检2种方式。人工巡检方式需要耗费大量的人力且效率较低,人工巡视过程中可能存在人为因素导致部分轨道缺陷不能及时发现,造成安全隐患。为解决此问题,提出基于机器视觉的非接触式检测系统并陆续应用于铁路基础设施检测。通过在专用检测列车上安装图像采集设备,记录线路的外观状态,并设计相应的模式识别系统来分析和处理记录的图像,以发现线路缺陷[2]。
所设计的车载智能巡检系统利用图像测量与激光三维测量技术,实现对轨道视觉数据的快速采集,以及对钢轨、扣件、道床等轨道部件常见可视化病害的自动检测;在不占用天窗点的情况下实现轨道巡检,并为轨道状态监测[3]提供可靠数据,为轨道养护提供客观依据,以有效保障行车安全。
1系统原理
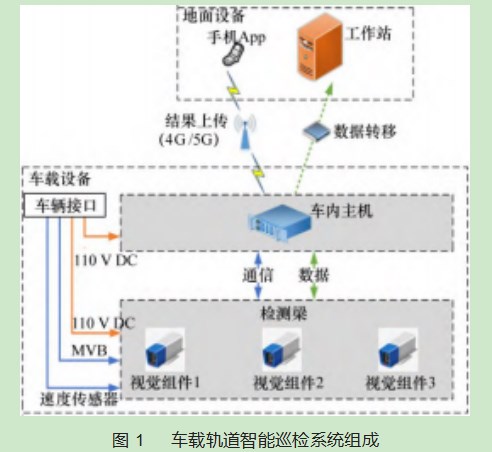
车载轨道智能巡检系统主要由车下设备巡检梁[4]总成、车内主机和速度传感器组成(如图1所示)。检测数据可通过车辆网络传输至地面进行应用。
巡检梁安装在车底,具备3套视觉组件,每套视觉组件内部包含1台3D相机和1台线阵相机及LED辅助光源。3套视觉组件分别位于左右两轨的正上方和轨道中线,相互配合实现对整个道床面的二维灰度图像和三维立体数据的同步采集。检测梁内部集成有车速信号处理器、电子标签阅读器、电源管理器等模块。车速信号处理器接收来自于车辆速度传感器的实时信号,为相机提供高精度触发信号。车速信号处理器带有5G路由模块,可用于远程通信和结果上传。电子标签阅读器接收安装于线路上的电子标签,对系统定位的累计误差进行修正。
检测梁左右两端的2套视觉组件中,线阵相机专门用于拍摄钢轨表面的二维灰度图像(如图2所示),并由LED光源提供辅助照明,从而实现对轨面病害的专门检测。3D相机与内部集成的线激光器相互配合,除了拍摄钢轨之外,还兼顾采集钢轨两侧扣件和轨枕(如图3所示)数据,实现对钢轨、扣件、轨枕等轨道部件的病害检测。
检测梁的中间视觉组件中,线阵相机和3D相机用于拍摄中间道床的二维图像和三维数据,实现对道床裂缝、信号设备破损等轨道病害的检测。将中间视觉组件与左右组件各自所获得的视觉数据进行拼接,最终得到整个道床面的二维灰度图像和三维立体数据(如图4~5所示)。在轨道检测成像过程中,主要运用了三维测量技术[5]与视觉检测技术[6]。
1.1三维测量技术
三维测量技术是指利用光学投影和成像设备相配合以获取物体表面点的三维空间坐标的一种非接触式测量技术,常用方法主要包括双目视觉[7]、激光散斑、莫尔条纹[8]、结构光等。其中,结构光三维测量技术[9]最成熟,相对而言检测精度最高,近年来随着智能芯片技术的发展,在工业检测领域得到了快速推广。
结构光三维测量方法也称为“光切法[10]”或“光刀法”,其技术原理为三角测量原理。利用激光器向测量物体投射激光,从而在物体表面获得一个反射点;再利用与激光器呈一定角度的相机对它进行拍摄,从而在物体、激光器和相机之间构成空间三角关系。由于相机与激光器之间的位置关系(角度和距离)可以通过事先标定的方法获得,从而可根据激光点(物体表面点)在相机成像面中的位置(像素坐标)推算出它与相机成像面的实际距离,进而可推算出它在世界坐标系中的实际坐标。
光切法[7]是三角测量法的一种扩展应用,即将激光光线改换成激光光面(光刀)。这样,在单次测量时,获得的便不是一个点的高度值,而是一条线(轮廓线)上各个点的高度值。进一步,利用激光线对物体表面进行纵向扫描,即可获得物体整个表面各点的高度值,也就是物体的轮廓面,俗称“三维点云”。结构光三维测量原理如图6所示。
1.2视觉检测技术
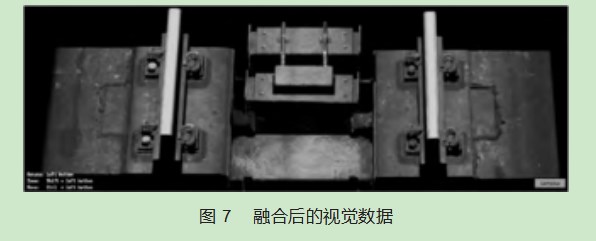
轨道智能巡检系统可同时采集轨道部件的二维灰度图像和三维深度数据,将2种数据类型各自在物体表面纹理检测和立体结构检测方面的天然优势相结合,并针对不同轨道部件的不同病害在2种数据类型中的不同表现特征进行针对性的数据应用,从而实现病害检测算法的高效率运行。图7所示为将二维灰度图像和三维立体数据进行像素级数据融合后得到的联合视觉数据。
2检测技术指标
轨道智能巡检系统安装于列车底部,在列车日常载客行驶的同时,实现对钢轨、扣件、轨枕、道床、道岔等轨道部件可视病害的自动检测。
2.1检测项目
轨道智能巡检系统可实现下列项目的自动检测。
(1)钢轨轨面:系统可自动检测轨顶表面异常,如龟裂、擦伤、掉块、压溃,也可检测断轨和轨端头区域轨面异常。
(2)钢轨裂纹:系统可检测钢轨裂纹,检测异常显示钢轨轨顶扩展至整个轨头的横向裂纹。
(3)接头轨缝[10]:系统可诊断轨缝不足或太大,以用于指导维修,检测误差不超过1 mm。
(4)扣件区域[11]:系统可检测安装在钢轨两侧的所有扣件异常,如丢失、松动、弹条歪斜、螺栓丢失等。
(5)道床与轨枕缺陷[12]:系统可检测道床和轨枕异常,如裂缝、剥落、歪斜、高度不良等。
(6)道砟[13]过量和缺损:道砟高度检测参考轨底高度,道砟高度超高或缺失应根据客户定义的离轨底距离标准判定,道砟高度判定可根据道砟参考轨枕顶面平均高度之间距离。
(7)轨道信号装置:各种应答器、计轴器及其他安装在轨道中间的信号装置自动识别。
(8)外部异物:可自动检测轨旁的异物。
(9)道岔护轨[14]:自动检测道岔,护轨区域。
(10)接头夹板[15]:检测夹板缺失、螺栓缺失。
(11)道口检测[16]:检测车辆所经过的道口。
2.2主要技术指标
轨道智能巡检系统对上述项点检出率均为90%以上,具体如表1所示。
3软件功能实现
3.1在线检测软件
轨道巡检系统在线检测软件安装于主机柜中的数据处理主机内,系统界面可实时显示巡检梁采集的轨道图像;当系统检测出重大病害时,突出显示重大病害的检测图像。
系统还具备实时显示检测进度功能,实时显示当前车辆所在位置、检测总里程以及距离全线检测结束所需进度。轨道病害在线检测软件主界面如图8所示。
系统设置有任务设置、系统自检、开始采集、停止采集、导出报表等功能按钮。在列车完成全线行驶,回到起点或终点处时,数据采集与在线处理软件随之结束运行,并自动生成Word格式的病害检出报告。
3.2离线处理软件
轨道数据离线处理软件安装于地面数据处理工作站,主要对钢轨剥落掉块、轨缝超标、扣件松动移位、道床裂缝等一般病害进行精细化处理,生成包含所有轨道部件检测值在内的检测结果数据库。
在巡检系统检测结束后,将主机中的数据硬盘拔出并插入该数据处理工作站,即可对原始数据进行离线精细化处理。离线处理软件在运行过程中,无需人工辅助,可自动生成检测结果。轨道数据离线处理软件界面如图10所示。
3.3轨道数据综合分析软件
轨道数据综合分析软件同样安装于数据处理工作站内,通过导入轨道数据离线处理软件生成的数据库,实现对包含检测病害和正常数据在内的轨道数据的正常展示和统计分析。用户可根据里程、区间、类型等查看其所关注的轨道部件。该部件的相关检测结果和图片均会在软件界面中显示出来。此外,用户也可利用该软件生成完整的EXCEL格式的检测报表和统计图表,如图11~12所示。
3.4手机App与网页客户端
为便于管理巡检系统轨道病害检测结果,设置网页客户端(图13)和手机App(图14),用户可通过计算机或手机实时查看和分析检出病害。手机App和网页客户端具备新增病害突出显示、固定周期内检出病害集中导出、固定周期内同一病害发展情况统计等功能。
3.4.1新增病害突出显示
对于巡检系统已经报出的病害,在没有完成现场修复的情况下,巡检系统每次检测时都会报出;对于当次检测的报出病害,巡检系统通过与以往的检测病害对比里程和图像ID,可准确判断出该病害是否为新增病害。若为新增病害,则在病害列表中置顶突出显示出来,并标明“新增”字样,如图15所示。
3.4.2固定周期内检出病害集中导出功能
用户选择固定周期的时间范围后,系统自动对周期内的病害进行筛选,通过病害里程和图像ID号对同类病害进行重复性检查,避免同一病害的重复报出。图16所示为网页客户端界面中的病害集中导出界面。
3.4.3固定周期内同一病害发展情况统计功能
(1)病害统计完善功能:对某一个病害的发展演变进行统计时,需要该病害的具体数值信息(如钢轨剥落掉块的尺寸、扣件松动长度、道床裂缝长度等)。由于在线检出结果只报告重大病害的类型、里程等信息,不报告具体数值,需要利用离线处理软件对原始数据进行精细化处理,从而报出重大病害和一般病害的数值信息;然后,再利用离线软件的“一键上传”功能将所有数值信息上传至数据管理云平台之中,并在用户端的手机App上展示出来。
(2)病害筛选查询功能:在网页客户端的综合分析菜单栏下,添加“病变列表”,其显示界面如图17所示。左侧树结构为统计的各个位置出现的病害,一级目录为病害类型,二级目录为定位里程。选择某一里程的病害,右侧窗口会按时间顺序显示对应位置的病害检出结果演变情况。同时,网页客户端具备病害演变曲线显示功能,将筛选出的病害按时间轴进行曲线显示。

4结束语
本文设计了基于三维测量与视觉分析的车载轨道智能巡检系统。与传统人工巡检方式相比,所设计的车载轨道智能巡检系统为轨道巡检提供了数据化、自动化的实施手段,实现了轨道巡检由“人检”向“机检”的进步,提升了轨道巡检的时效性与准确率。
轨道智能系统采集的数据实时存储于车载主机中,并可以利用5G技术进行远程上传。利用大数据、云处理等技术,实现了检测数据在线实时处理。系统配备了手机App与网页终端,用户可通过手机或计算机对检出病害进行实时查看和分析。用户也可以通过离线软件访问数据库,对离线数据实现精细化、可视化的访问与分析。该车载轨道智能巡检系统的研制,实现了轨道巡检的信息化、智能化,为轨道交通的迅速发展提供了技术保障。
参考文献:
[1]聂海丽.车载智能轨道巡检系统的研究与应用[J].上海铁道科技,2013(1):33-35.
[2]马臣希,张二永,方玥,等.车载轨道状态巡检技术发展及应用[J].中国铁路,2017(10):91-95.
[3]左玉良.轨道几何状态检测技术的应用研究[D].上海:同济大学,2007.
[4]张学军,王孔明,徐银光,等.青岛悬挂式单轨轨道梁内部巡检设备研制[J].城市轨道交通研究,2018,21(7):83-86.
[5]李中伟.基于数字光栅投影的结构光三维测量技术与系统研究[D].武汉:华中科技大学,2009.
[6]黄思博,蔡昭权,方晓彬,等.基于机器视觉的汽车线束外观检测方法研究[J].现代计算机,2019(19):87-92.
[7]杨记鑫,胡伟霞,赵杰.基于双目视觉的标定和立体匹配的研究[J].电子设计工程,2022,30(13):50-53.
[8]杨文昌.基于莫尔条纹的扭转角全周测量系统研究及实现[D].长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所),2021.
[9]赖俊霖.基于摩尔光栅和神经网络的面结构光三维测量技术研究[D].重庆:重庆大学,2019.
[10]王晓林,陈伟民,黄尚廉.光切法三维轮廓测量的原理及其应用[J].光学技术,1997(2):41-45.
[11]蔡武.钢轨接头处轮轨接触有限元分析[D].成都:西南交通大学,2006.
[12]王凯.基于图像纹理特征提取算法的研究及应用[D].成都:西南交通大学,2013.
[13]黄赞武,魏学业,刘泽.基于模糊神经网络的轨道电路故障诊断方法研究[J].铁道学报,2012,34(11):54-59.
[14]陈小平,王平.无碴道岔轨道刚度分布规律及均匀化[J].西南交通大学学报,2006(4):447-451.
[15]杨荣山.钢轨接头的应力分析与优化研究[D].成都:西南交通大学,2002.
[16]孔繁军.基于光电开关的铁路道口检测系统设计与实现[J].无线互联科技,2021,18(24):43-45.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63581.html