SCI论文(www.lunwensci.com)
摘要:根据航空航天模拟实验系统对转台的应用需求研制了一套大功率全向转台控制系统。为满足其大惯量高动态特性的需求, 提出了基于三环控制的粒子群最优参数自整定模糊 PID 控制系统。 MATLAB 仿真结果表明: 该控制策略相较传统PID 控制超调量更 小、调节时间更短、系统带宽更大; 同时该系统在抑制轴系耦合干扰和负载干扰的能力比传统 PID 控制更强。工程实践表明, 所 提转台控制系统可以显著提升转台的控制精度, 极大提高了转台控制系统的动态性能, 满足“双十”指标, 同时通过粒子群迭代 的方式计算系统最优参数可以大大减少人工调参的时间, 提高了产品研发效率。
关键词:全向转台,粒子群,模糊PID,三环控制
Omnidirectional Turntable Control System Based on Particle Swarm Optimization Fuzzy PID Three Loop Control
Huang Hantao1. 2. Li Yuezhong1. Chen Bin2. Dong Wenjian2. Xu Qun2. Ma Chaoqun2
( 1. School of Mechanical and Electrical Engineering, East China University of Technology, Nanchang 330013. China;
2. Shanghai Aerospace Control Technology Research Institute, Shanghai 201109. China)
Abstract: According to the aerospace simulation experiment system requirements for turntable, a high-power omnidirectional turntable control
system was developed. In order to meet the demand of large inertia and high dynamic characteristics, a fuzzy PID control system for particle
swarm optimization based on three loop control was proposed. Simulation on MATLAB shows that compared with the traditional PID control
strategy, the overshoot is smaller, the adjustment time is shorter and the system bandwidth is larger. At the same time, the ability of the system
to suppress shafting coupling interference and load interference is stronger than the traditional PID control . Practical implementation shows
that the proposed turntable control system can significantly increase the control accuracy of turntable, greatly improve the dynamic performance
of the turntable control system, satisfy the "double tenth" criteria, at the same time by means of particle swarm iteration calculation system, the
optimal parameters can greatly reduce the adjusting time, improve the efficiency of product development.
Key words: omnidirectional turntable; particle swarm; fuzzy PID; three loop control
引言
随着我国航空航天领域的飞速发展, 其相关仿真设 备的研发变得越来越重要。转台是一种高精度数字化仿 真设备, 能准确模拟飞机等飞行物体在实际飞行时的姿 态变化, 进行半实物仿真, 再现其运动过程中的各种动 力学特性, 对促进我国工业发展起到了重要作用。全向 转台的研制目的就是为导引头[1] 提供半实物仿真。为得 到高精度的仿真结果, 转台动态特性和稳态误差的要求 十分严格, 尤其是大功率转台系统, 其面临的强电磁干 扰、高频干扰、结构形变对转台系统的影响十分明显, 因此对大功率转台系统的控制算法设计、电气电路设计 形成了较大挑战。
控制算法设计是转台控制系统研究的核心之一, 转 台控制策略通常基于双环或单环控制。文献[2-4]介绍了三轴转台和五轴转台的系统构成但缺乏电气电路设计和 算法构成。文献[5]介绍了有关模糊 PID 控制在转台上的 应用, 相比传统 PID 控制提高了速率精度降低了稳态误 差, 并使系统具有自适应的能力。文献[6]在模糊 PID 控 制的基础上结合粒子群优化, 通过优化算法获得的最优 解代入变论域模糊 PID 控制系统模型中, 使系统精度和 抗干扰能力得到进一步提高, 但仅针对速度环进行了测 试。文献[7]同样提出了一种变论域模糊 PID 控制, 对比 分析传统 PID 控制, 对转台低速性能有明显提升, 但对 于转台的高频特性并没有进行详细的分析。文献[8]提出 了一种新型的基于摩擦的滑模+非线性状态观测器控制 方法, 该方法有效减小了系统的超调量, 提高了系统的 鲁棒性, 但是未能传化为工程实现。文献[9]结合 LuGre 摩擦模型和非线性干扰观测器 (NDO) 提出了一种补偿非线性干扰的方法, 提高了转台低速性能, 但所有干扰 源都被假定为缓慢变化的 (低频), 没有论证高频干扰造 成的影响。文献[10]将速度环改为加速度环, 位置环控 制器为滑膜控制, 输入端采用跟踪微分器 (TD) 实现对 输入信号的跟踪, 对比传统三环控制位置精度进一步得 到提升, 系统鲁棒性更强。文献[11]针对大惯量低刚度 的转台设计了一种基于速度环的曲线控制算法, 使转台 加速度、速度更加平滑超调更小。
综上所述, 粒子群优化下的模糊 PID 控制器已经有 了一定的研究成果, 但是若想应用在大功率多轴转台控 制系统中, 还需要根据系统实际物理特性进一步优化, 最终达到提高全向转台控制系统性能的目的。本文将从 稳态误差、动态性能、伺服刚度[11] 和频率响应 4 个方面 进行理论和仿真分析。并开展工程实验以验证基于三环 控制系统的粒子群最优参数自整定模糊 PID 控制策略相 较传统 PID 控制的优越性。由于国内缺乏基于转台控制 系统的电气电路设计文献, 本文也将结合工程实际分析 系统电气电路设计。
1 系统组成
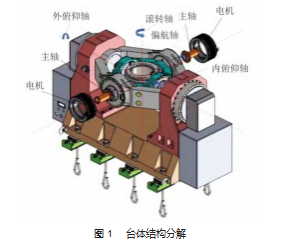
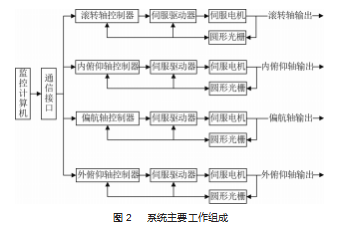
全向转台控制系统由控制机柜和台体组成, 转台四 轴均可 360°连续旋转, 框架和轴系之间不存在机械干涉 情况。为减小轴系耦合对系统造成的影响, 全向转台结 构形式为卧式 O-O-O-O 框架结构, 系统采用同轴多电 机的工作模式, 可输出大扭矩而不增加台体体积, 同时 电机端均串联数个磁环以减小电磁干扰对系统造成的影 响。全向转台台体主要由框架、导电环、力矩电机和编 码器组成, 台体的结构分解如图 1 所示。系统的主要工作组成如图 2 所示。系统通过高精度 编码器实时采集各轴转动位置, 通过导电环和电缆线传 输给工控机和驱动器。工控机接收上位机命令将指令和 反馈的偏差通过控制器进行调整, 对驱动器模拟量大小 进行实时控制以满足系统闭环条件, 从而实现电机的定 位定速。工控机是实现数据采集、算法实现、实时通信的重要组成部分, 控制软件为 VxWorks 平台, C 语言开 发, 控制周期 0.5 ms, 工控机选用研华 PCI190 工控机, 数字量模块选用 PCI-7230. 编码器采集及时钟模块选用 AF01. 该模块带宽和分辨率极高, 满足系统需求。上位 机开发平台为 LabVIEW。驱动器和力矩电机作为系统的 执行单元, 驱动器选用 Kollmorgen S700 系列, 力矩电机 选用大连科德 GTML 系列, 以滚转轴电机为例。输入输 出滤波器分别为 SunHenry SH920 系列和 SH960 系列。四 轴反馈元件均采用绝对式 Renishaw 圆形光栅, Biss C 协 议, 读数头分辨率为 26 位。
2 基于三环控制的粒子群模糊 PID 控制策略
本文首先提出一种基于三环控制的模糊 PID 控制算 法保障系统的动态特性和稳态精度, 然后根据控制对象 特性通过粒子群迭代算法得出控制器最优参数。以全 向转台的滚转轴作为参考对象, 对比传统 PID 三环控 制以及有无粒子群优化算法调节下对系统动态特性和 稳态精度的影响。所有仿真均在 MATLAB/ Simulink 环 境下进行。
2.1 控制对象建模
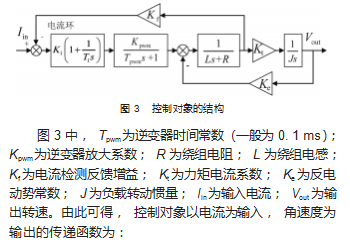
控制对象主要为系统的执行单元, 驱动器和电机。 使用驱动器力矩模式构成电流环以及电流环控制器。控 制对象的结构如图 3 所示。
2.2 粒子群优化算法
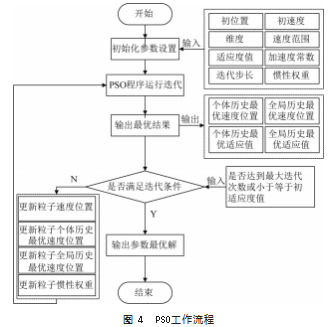
粒子群优化 (Particle Swarm Optimization, PSO) 算 法是一种在已知范围内用来求取解决问题最优方案的寻 优算法。在控制系统中可以将 POS 与其他控制算法结合 实现参数的最优解, 同时根据不同的工作环境可以实现 最优参数的自适应性整定。主要原理是根据输出和初始 值进行迭代直到结果满足成立条件为止得到最优值。图 4为本文 PSO工作流程。
其中粒子群适应值函数为 ITAE(时间乘误差积分准 则), ITAE 的表达式为:
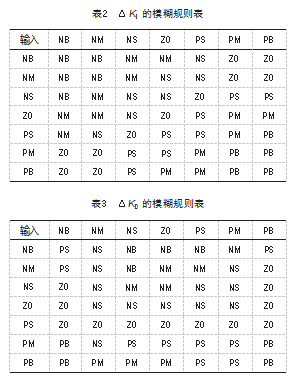
2.3 基于三环控制的模糊 PID控制器设计
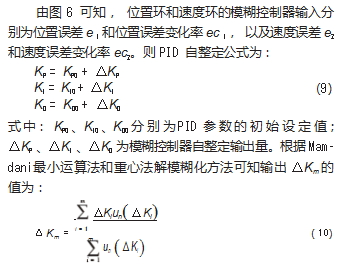
在力矩电机控制中, 常用传统 PID 加高阶前馈网络 校正的方式进行控制, 但这种方式在超高性能指标要求 下往往难以达到最优控制效果, 面对各类非线性因素对 系统造成的干扰时难以做到自适应调节导致系统鲁棒性 下降。同时, 采用传统 PID 控制策略对人员调试水平和经验要求较高, 并且费时费力。模糊控制 (Fuzzy Con⁃ trol) 算法本质上是通过反馈元件实时得到误差 e 和误差 变化率 ec, 结合模糊控制规则 R 得到控制量输出 u, 最终 实现 PID 的自整定。基于三环控制的模糊 PID 控制结构 如图 6所示。
2.4 系统稳定性对比
3 仿真研究
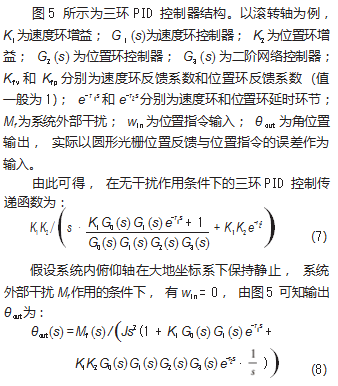
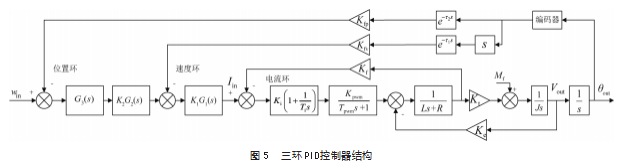
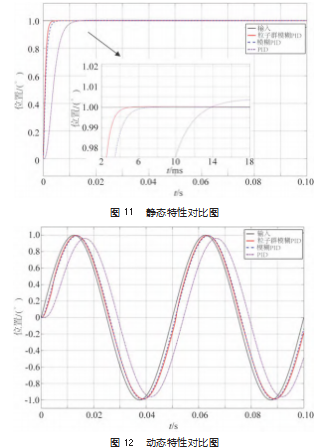
以滚转轴为例, 仿真平台为 MATLAB Simulink, 分 别对传统 PID 三环控制模型、模糊 PID 三环控制模型和 粒子群模糊 PID 三环控制模型进行动静态仿真对比, 并 且就不同类型外部干扰进行仿真比较验证。仿真对比模 型如图 9所示, 其中模糊 PID模型如图 10所示。
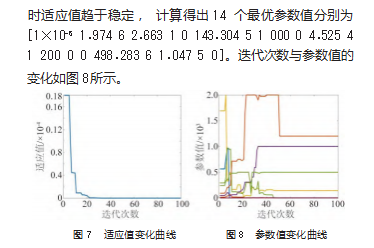
PID 控制器几乎没有超调, 且调节时间最短、静态误差 最小、静态性能最优; 动态特性中, 具有模糊 PID控制器 的模型表现出较好的动态特性,粒子群算法的有无对动态 性能的影响不明显, 显然模糊 PID控制相较传统 PID控制 具有更好的幅相特性, 更容易满足“双十”指标的要求。
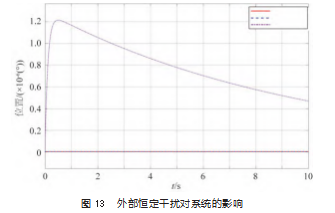
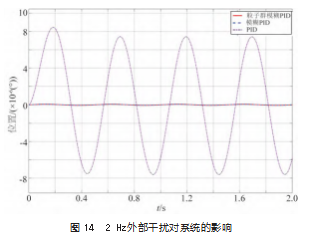
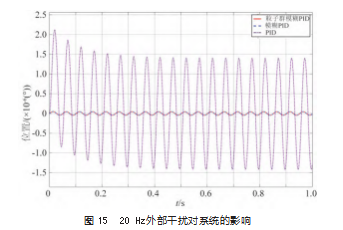
假设全向转台处于系统闭环且相对地球坐标系静止 状态, 此时 win = 0.当输入外部干扰 Mf =1N ⋅ m 阶跃信 号时, 3种控制模型的输出 θout 如图 13所示。结果表明,基于三环控制的粒子群模糊 PID 控制器具有更强的伺服 刚度, 收敛更快, 受干扰影响更小。
4 物理实验研究
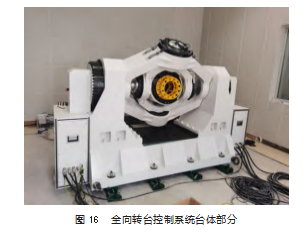
带模拟负载下的全向转台如图 16所示。
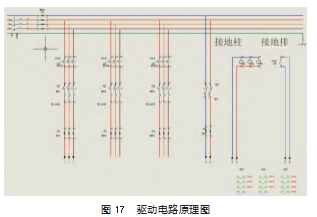
以 滚 转 轴 为 例, 驱 动 电 路 原 理 图 使 用 SolidWorks Electrical平台进行设计, 如图 17所示。
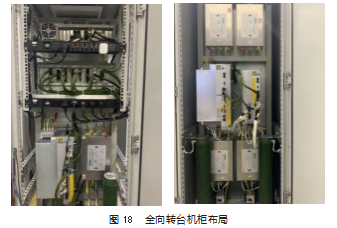
控制机柜主要包含配电模块、逻辑电控制模块、工 控机、驱动器和滤波器, 机柜布局如图 18所示。
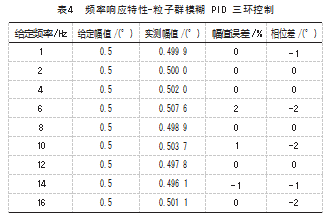
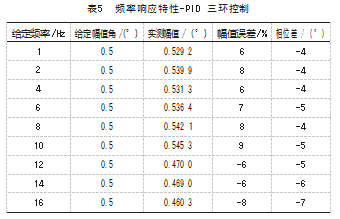
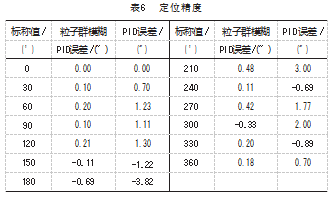
根据粒子群模糊 PID 三环控制和传统 PID 三环控制 两种不同的控制策略, 对滚转轴进行幅值为 0.5. 频率点 由 0~16 Hz 的扫平运动, 结果如表 4~5所示。两种方法均能满足“双十”指标, 但基于三环控制的粒子群模糊 PID 控制策略在硬件条件一致的情况下, 可以使转台表 现出更好的频率响应特性。使用高精度光电自准直仪, 对两种控制策略作用下的 滚转轴定位精度进行测量。两种控制策略的定位精度误差如 表 6所示。结果表明, 粒子群模糊 PID三环控制相较传统 PID三环控制静态特性更好, 定位精度提高了一个数量级。
5 结束语
本文对四轴全向转台的控制方法进行了研究。为提 高转台静态和动态性能,研究了基于三环控制系统的粒子 群最优参数自整定模糊 PID 控制系统在工程实现中的问 题。首先, 构建粒子群模糊 PID三环控制模型, 并通过仿 真分析与传统 PID三环控制模型进行系统性能对比, 论证 了粒子群模糊 PID三环控制具有更强的抗干扰能力和更小的稳态误差, 理论上证明了粒子群模糊 PID三环控制策略 的优越性。其次,通过工程实现对比了两种控制策略的实 测频率响应和定位精度。在幅值为 0.5°, 频率为 1~16 Hz 的扫频运动下, 通过粒子群模糊 PID三环控制将最大幅值 误差从 0.045 3 降为 0.007 6. 最大相角误差从 7 降为 2.位 置精度最大误差从3.82″降为0.69″ 。综合仿真与实验结果, 基于三环控制系统的粒子群最优参数自整定模糊 PID控制 策略使得转台的控制精度得到显著提升, 调节时间更短, 超调量更小, 抗干扰能力更强, 频响特性更好。充分证明 了粒子群模糊 PID三环控制策略的有效性和实用性。
参考文献:
[1] 魏政, 杜勇, 刘辉, 郭鹏程, 高希 . 多模复合制导技术的发展现 状与分析[J]. 航空兵器, 2022. 29(6): 26-33.
[2] 路平,刘凯,王龙 . 三轴飞行仿真转台控制系统设计[J].传感器 与微系统, 2016.35(9):110-113.
[3] 张旭明,刘喜平,曾悠兵,等 .基于 ARM+DSP 的五轴飞行仿真转 台控制系统设计[J]. 飞航导弹,2017. 3:85-88.
[4] 张旭明,侯伟钦,董恒 . 五轴仿真转台电控系统设计[J]. 飞航导 弹,2017. 445(4):90-93.
[5] 任志斌,刘今越,郭志红,等 .基于模糊 PID 算法的高精度转台 控制系统研究[J].机床与液压,2017.45(4): 172-175.
[6] 魏彬,唐凤轩,梁畅,等 .基于变论域模糊 PID 的航空转台控制 系统研究[J]. 北京化工大学学报,2022.49(2):107-114.
[7] FU H X, LI Y, ZHANG Z L, et al. Ship three-axis turntable con⁃ trol based on fuzzy inference variable universe[C]//Proceedings of 2017 Chinese Intelligent Automation Conference, 2017(458): 201-208.
[8] 刘慧博,刘尚磊 .基于摩擦和干扰补偿的转台模糊反演滑模控 制[J]. 系统仿真学报,2018.30(3):1195-1202.
[9] 赵回,王雪梅,许哲,等 . 一种转台伺服系统干扰补偿控制方法 研究[J]. 中国测试,2019.45(3): 139-144.
[10] 王欢,赵蔚,崔家明,等 .位置伺服转台系统双回路控制方法研 究[J].控制工程,2021. 28(12):2410-2419.
[11] 蔡彦博,杨德振 . 大惯量低刚度转台的扫描控制[J].激光与红 外,2022. 52(2):247-251.
[12] ONG Y S,GUPTA A,GONG M. Applying particle swarm optimi⁃ zation[M]. Heidelberg New York Dordrecht London: Springer Verlag Berlin Heidelberg, 2014.
[13] 尹明,范丽鹏,张高平 .影响直接驱动数控转台伺服刚度的因 素分析[J].组合机床与自动化加工技术,2013.468(2):58-60.
[14] PHU N D,HUNG N N,AHMADIAN A, et al. A new fuzzy PID control system based on fuzzy PID controller and fuzzy control process[J]. International Journal of Fuzzy Systems, 2020. 22: 2163-2187.
[15] YAN L,DUAN H,YU X. Advances in guidance, navigation and control[C]//Proceedings of 2020 International Conference on Guidance, Navigation and Control, ICGNC 2020. October 23- 25. 2020. Tianjin, China. Tianjing: ICGNC, 2020.
[16] ANGRISANI L,ARTEAGA M,PANIGRAHI B K,et al. Lecture notes in electrical engineering[M]. Singapore: Springer, 2022.
第一作者简介:黄瀚韬 (1996-), 男, 硕士研究生, 研究领域 为伺服系统控制。
通讯作者简介:李跃忠 (1969-), 男, 江西于都人, 博士, 教授, 研究领域为检测技术与自动化装置
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63579.html