SCI论文(www.lunwensci.com)
摘要:为解决传统城市轨道交通检修运营模式在全自动驾驶车辆基地运用中存在的自动化控制不足、作业流程难以管控、作业效率低的问题,研究了作业综合管控系统在全自动驾驶车辆基地检修运营模式中的应用效果。作业综合管理系统通过建立数据链传输各个检修相关系统的数据,建立一个集作业信息显示调度、作业人员管理、作业计划管理、自动驾驶区安全联锁控制、门禁控制、图像监控及安全警示、作业人员定位、作业流程管理及评价等功能于一体的综合管理平台。系统建立后将改变原有按专业划分的分散管理模式,将自动驾驶区内各专业、各地点的信息进行集中监控,融入多种安全防护措施,保障作业安全,并以作业流程顺序为主线,串联各个工作场景,形成从作业起始到结束的闭环流程管理。
关键词:全自动驾驶,车辆基地,作业综合管控系统
Application Analysis of Comprehensive Operation Control System of Fully Automatic Driving Vehicle Base
Zhao Leitong1,Li Yuanwang2,Lin Yebin3
(1.Nanning Rail Transit Group Co.,Ltd.,Nanning 530022,China;2.China Railway First Survey and Design Institute Group Co.,Ltd.,Xi'an 710043,China;3.Beijing Railway Engineering Electromechanical Technology Research Institute Co.,Ltd.,Beijing 100160,China)
Abstract:In order to solve the problems of insufficient automatic control,difficult operation process control and low operation efficiency existing in the traditional urban rail transit maintenance and operation mode in the application of fully automatic driving vehicle base,the application effect of operation comprehensive control system in the maintenance and operation mode of fully automatic driving vehicle base was studied.The integrated operation management system transmitted the data of each overhaul related system by establishing data link,and established a comprehensive management platform integrating operation information display scheduling,operation personnel management,operation plan management,automatic driving zone safety interlock control,access control,image monitoring and safety warning,operation personnel positioning,operation process management and evaluation.The construction of the system would change according to the original decentralized management mode of professional division,the autonomous region across various professional,some information for centralized monitoring and integrated into a variety of security measures,to ensure the safety of operation,with the workflow sequence as the main line,various work scenarios were connected in series to form a closed-loop process management from the beginning to the end of the job.
Key words:fully automatic driving subway;vehicle base;integrated operation control system
0引言
随着GoA4等级的全自动驾驶技术的不断成熟及应用,全自动驾驶作业区域人员的人身安全及作业效率也越来越受到关注,传统的非全自动驾驶车辆基地检修运营模式难以满足全自动驾驶车辆基地的运营管理要求[1]。在传统的非全自动驾驶车辆基地检修运营模式中,部门之间、层级之间以手动填写的纸质文件来传达任务和交接信息,信息不能及时、快速及准确地分发,历史数据难以快速准确查询。一线工作任务采用对讲机呼唤应答方式沟通,难以准确记录检修过程,不满足质量管理体系的过程控制要求。作业安全主要依靠人工流程控制,人员状态不佳时可能出现安全隐患。系统之间数据链路不通,导致信息记录工作重复劳动,例如故障记录需要在多个电子、纸质平台手动填写,工作效率有待提高[2]。
根据南宁地铁5号线那洪车辆基地全自动驾驶区域的检修运营场景要求,有必要通过多种可靠、稳定的检测及控制手段,如生物特征识别技术、区域边界视频侦测技术、PLC控制技术等,实现停车列检库隔离开关逻辑联锁及远程分合闸、人员进出无人区过程卡控、人员走行区域安全防护等功能,达到可靠控制、精准卡控,作业留痕及可追溯的使用要求,提高运用库列检作业效率及作业安全。
本文依托南宁地铁5号线那洪车辆基地项目,结合全自动驾驶车辆基地全自动驾驶区域的检修运营场景需求,对全自动驾驶车辆基地作业综合管控系统的各功能项点进行分析,总结得出全自动驾驶车辆基地作业综合管控系统在全自动驾驶区域检修运营模式的实际应用效果及特点,为后续全自动驾驶区域检修运营模式下作业综合管控系统的应用发展提供相关指导意见[3]。
1全自动驾驶对车辆基地的功能需求
根据全自动驾驶运营检修作业场景需求,车辆基地应具备以下功能。
(1)车辆基地应设置派班室,内设置TIAS设备、CCTV、专用电话、专用无线、广播、应急抢修等设备,供车辆基地工作人员监控管理车辆基地运营状况,对车辆基地区域设备故障或突发事件开展应急处置。此外,车辆基地无人区应设置SPKS工作人员防护开关,库内停车股道SPKS就地设置于库尾部,洗车库、咽喉区的SPKS设置在DCC控制室IBP盘。在DCC控制室设置无人区“车场紧急关闭”按钮DESB,以蘑菇形式,设置在IBP盘。
(2)车辆基地的每个SPKS单独设置一个旁路开关(此旁路开关只适用于检修维护施工期间SPKS开关故障无法恢复的情况下使用)。
(3)为了保证司机和一般作业人员进入停车列检库各分区的安全和便捷性,需设置横向通道。通道位置宜与辅跨内派班室/DCC位置相对应,可设在库前、库中和库尾。
(4)设置无人驾驶区域和有人驾驶区域,无人驾驶区域一般为停车、列检、洗车等自动运行的区域;有人驾驶区域一般为静调、吹扫、镟轮、周月检、定临修、试车线等。两个区域划分界面应清晰并配有物理隔离措施[4-5]。
(5)当无人区与有人区分界处的隔离跨越股道时,应有相应的安全防护措施(不能侵入限界,推荐虚拟电子围栏安全防护),并能在车辆基地派班室/DCC中显示,并声光报警[6]。
(6)对进入无人区作业的工作人员,应设有保护区安全防护措施(SPKS)且标识明晰,SPKS防护分区的划分应体现安全与效率兼顾的原则。
(7)对工作人员在车辆基地停车列检库的上、下车作业,宜配套设置工作人员登乘平台,并具备工作人员上下车的安全措施[6];为保证工作人员上下车的安全,登乘通道与一般无人区轨行区作业人员通道应严格分离,互不交叉。
(8)无人区不同的SPKS防护分区应有物理隔离措施,防止工作人员侵入相邻防护分区。
(9)洗车库应设于无人区,并满足自动洗车的要求;洗车机控制室应设于有人区,并考虑从洗车机控制室(有人区)进入洗车库(无人区)的作业人员的安全[7-12]。
2作业综合管控系统组成及功能分析
基于全自动运营场景要求,全自动驾驶车辆基地作业综合管控系统包含作业人员及计划管理系统、作业安全管理系统和作业质量管理系统3大部分组成。
2.1作业人员及计划管理系统
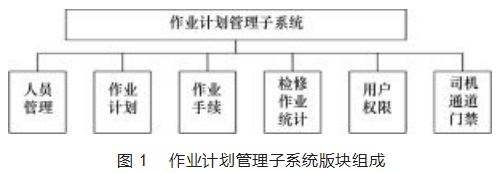
作业计划管理子系统主要由人员管理、作业计划、作业手续、检修作业统计、用户权限、司机通道门禁6大版块组成,如图1所示。
(1)人员管理版块包括人员出勤登记和人员作业动态列表功能。作业人员点名时,工班长在系统上勾选出勤人员,系统由此获取当班人员名单,生成并显示出名牌。挂出名牌后的作业人员才能接收新发作业任务。当作业人员有作业任务进行时,通过名牌可以看到作业人员的工作进度等情况。
(2)作业计划版块用于定制地铁车辆的列检计划检修信息,包括根据收发车生成的列检作业计划,可进行作业任务编辑、审批、派发、开始作业提醒、作业结束提醒等。同人工制定计划一样,作业综合管控系统需要得到收发车计划来制定基本的检修计划,而收车计划是厂调在TIAS系统终端制定的。作业综合管控系统可以通过与TIAS的数据接口获取实时收发车计划,收发车计划变更时,检修计划同步改变。车辆入库时,作业综合管控系统可以从TIAS系统确定分区车辆已停稳,第一个准备进入对应检修分区的人员先领取SPKS开关门钥匙,同时领取门禁卡,然后打开SPKS开关,进入检修分区,开始检修作业。
作业综合管控系统设有与TIAS、360°轨旁综合检测系统、车辆专家诊断系统等的数据接口,通过协商好的WebService API、MySQL中间数据库等数据交互技术,获取收车计划、需要人工检查的故障或疑似故障信息。系统将这些非常规任务与检修规程要求的基本任务整合,自动生成列检作业计划。
(3)作业手续版块包括列检作业、清洁作业、库内调车、司乘人员登车、库内设备检修、外来人员入库等手续。系统能卡控各个作业的流程,以保证安全,同时形成包含时间、地点、车辆、人员、事件等完整信息的过程记录。
(4)检修作业统计版块主要用于查询作业明细、作业时长明细、人员实时明细、检修质量评价、效率评价、列检作业评价等。
(5)用户权限版块包括基础信息和人员状态,基础信息包括人员编号、姓名、性别、职位等,系统初始建设时,先统计整理录入所有作业人员的基本信息和系统权限等级到电子表格,经过审核后采用数据导入的方式导入到管理系统。后期系统运行时,由管理员来进行人员信息的增加、删除、修改、权限调整等操作。
(6)司机通道门禁版块用于对司乘人员进行动态下发门禁权限,可通过与乘务派班系统的数据接口,自动导入乘务派班计划,通过结合当日司机及多职能人员的出乘计划综合判定司机及多职能人员进出各检修分区的门禁权限,实现动态权限管理;即在出乘计划规定的时间段内,司机及多职能人员有相应的检修分区权限进入规定的检修分区,在规定的时间段外,该门禁权限将被撤除;可有效减少作业人员的登记及审核工作量,缩短司乘人员出勤登记时间,提高出车效率。
2.2作业安全管理系统
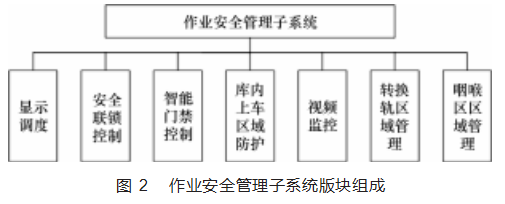
作业安全管理子系统主要由显示调度版块、安全联锁控制版块、智能门禁控制版块、视频监控版块、转换轨区域管理版块、库内上车区域防护版块、咽喉区区域管理版块7大版块组成,如图2所示。
(1)显示调度版块主要用于实时显示库内关键设备的运行状态,供使用人员清晰地获取运用库各检修分区及各股道的关键设备状态,如:各股道接触网有电/无电,各股道接触网接地/未接地,各股道台位有车/无车,各检修分区SPKS开关激活/关闭,各检修分区内有人作业/无人作业,各检修分区门禁解锁/封锁等关键管控信息,图形表示及文字提示简单清晰,布局合理,针对性强,实时性高。
(2)安全联锁控制版块用于采集现场各关键设备的运行状态,建立一系列设备操作流程的安全条件联锁管控,如:各股道隔离开关远程分闸/合闸操作,库尾检修通道门禁与SPKS开关信号的安全联锁控制,现场各警示灯及LED显示屏的显示控制等,规范作业流程、自动化管控、保证设备操作安全。
(3)智能门禁控制版块用于运用库库尾检修通道及司机下穿通道的人员进出权限管理及安全卡控,采用生物特征识别技术、自助领卡、人员动态门禁权限下发、多工种人员进出流程安全管理等多种技术及管理方式,实现人员进出检修分区的全流程自动化管控,门禁使用记录留痕等功能,提高检修作业效率,把好检修作业安全管理第一关。
(4)视频监控版块主要用于对库内关键区域进行视频监控并存储录像,供使用人员通过监控画面查看库内关键设备状态及区域人员活动情况,如:各股道隔离开关刀闸位置、库尾检修通道门禁人员进出活动、司机下穿通道门禁人员进出活动等,支持实时查看及录像回放功能。
(5)库内上车区域防护版块用于对司机等多职能人员进入检修分区后的活动范围进行限制及安全防护,利用视频侦测技术及现场声光警示等技术手段,对违规横跨股道、侵入危险区域等越界行为进行检测及警示,防护司机等多职能人员的人身安全,降低因人员违规活动及车辆动作导致生产安全事故的风险。
(6)转换轨区域管理版块用于转换轨区域司机登车梯的门禁管理,通过生物特征识别技术及人员门禁权限动态下发管理方式,确保门禁使用角色(司机)唯一,限制其他人员进入登车梯。
(7)咽喉区区域管理用于咽喉区区域有人区与无人区边界的人员侵界报警,利用激光检测技术在边界处设立无形的警戒线,检测违规人员闯入无人区的行为动作,并及时给出报警信息,降低因误闯无人区导致的人身伤害事故。
2.3作业质量管理系统
作业质量管理系统是以视频监控为手段,配合监控管理软件、检修录像拼接软件、流媒体播放软件及作业路线巡检管理软件,并结合检修作业管理的实际情况,综合开发的一套针对检修作业质量检查、监督和评判的系统,是保障检修质量和安全的一项重要设备和手段。
作业质量管理系统通过高分辨率视频摄像头对检修车组底部及其两侧作业实施全程跟踪、监控。同时,可实现检修作业过程的各个作业者的录像剪切和拼接,使检修作业过程具有可追溯性,并对其作业过程及质量进行打分和评价。通过规范检修生产作业,及时发现漏检、漏修及违章作业,避免因检修质量问题所造成的安全事故。从而达到生产作业规范、有序可控的目的。
系统自动采集现场数据,进行统计分析,完成作业时间效率等按天、月、年的综合统计和时长分布图,并可与标准作业时间进行对比,作为对检修作业评价的依据。完成单列车入库检修总检修时间、各项作业时间,待检停时间等数据的实时自动采集记录和统计,并结合大数据技术进行分析,为提高检修效率提供数据分析支撑和依据。
利用多维数据统计技术作业人员工作时长和工作量按天、月和年的分布图,通过统计表可以直观查看作业人员的巡检情况。
3测试验证及结果分析
本文依托南宁地铁5号线那洪车辆基地项目,实地调研全自动驾驶车辆基地作业综合管控系统各功能模块在那洪车辆基地检修作业生产中的应用效果,研究总结得出:全自动驾驶车辆基地作业综合管控系统利用计算机逻辑控制、专家判断、安全联锁、智能门控、实时联动、智能告警、实时定位等先进技术,建立一个程序化、网络化、可视化、标准化的安全保障及质量评价体系,并与管理措施相配套,进行人机联控,实现自动驾驶区作业过程的全面综合管控,其适用于全自动驾驶车辆基地的生产组织,满足全自动驾驶车辆基地的检修运营模式要求,提高了运用库列检作业效率及作业安全。同时,该系统存在以下问题:
(1)系统融合了多种技术,基层传感技术的成熟度决定了系统的稳定性;
(2)该系统设计运营多个部门管理,后期维护组织协调难度较大,但有效消除了各部门之间作业管理的“真空带”。
4结束语
本文给出了全自动驾驶车辆基地作业综合管控系统的功能与应用分析。该系统以当前计算机及信息技术发展的前沿成果为基础,针对全自动驾驶车辆基地自动驾驶区的人员、车辆以及设备的管理难题,搭建了一套综合管理系统,系统主要包含人员及计划管理、作业安全管理及作业质量管理3大主要功能模块,实现作业人员、作业计划、作业手续的智能化、信息化管理,实现自动驾驶区的门禁管控以及特殊区域的安全防护、侵界报警,确保人员及设备安全。统以多种技术手段解决了自动驾驶区内检修作业人员安全保障技术难题;实现地铁车辆基地检修管理方式及手段的信息化、智能化,最终实现地铁车辆运用维修过程向智能运维方向的全面升级。
参考文献:
[1]申樟虹.大容量全自动驾驶车辆功能设计及运行保障研究[D].北京:北京建筑大学,2017.
[2]T/CAMET 04017.1-2019,城市轨道交通全自动运行系统规范[S].
[3]刘展海.基于机器视觉识别的行业应用初探[J].科学技术创新,2019(31):111-112.
[4]祝锐.西安地铁16号线沙河滩车辆基地设计特点及创新性研究[J].工程技术研究,2021,6(13):221-222.
[5]朱翔,孙少军,余海斌,等.南宁市轨道交通5号线一期工程全自动运行场景说明书[Z].上海申通轨道交通研究咨询有限公司.
[6]王亚丽.基于全自动驾驶技术的南京地铁7号线高架车辆段设计[J].城市轨道交通研究,2018,21(10):142-146.
[7]李愿望,郑辉,冯凯.全自动驾驶地铁车辆基地工艺设计特点及创新[J].铁道标准设计,2019,63(11):175-180.
[8]北京铁道工程机电技术研究所股份有限公司.南宁地铁5号线那洪车辆基地全自动驾驶车辆基地作业综合管理系统说明书[Z].
[9]王大鹏.车辆段作业安全管控系统的研究与应用[J].科学技术创新,2019(31):112-113.
[10]石金峰.作业监控评价管理系统结构设计与深化研究[J].哈尔滨铁道科技,2021(4):13-16.
[11]李骏,刘厚军,吴静,等.新一代动车组作业过程监控评价管理系统研究与运用[J].中国铁路,2016(8):70-74.
[12]黄俐.动车组作业监控评价管理系统[Z].黑龙江省哈尔滨铁路科研所科技有限公司,2019-09-23.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61875.html