SCI论文(www.lunwensci.com)
摘要:为解决隧道锚杆施作效率低、风险高等问题,设计了一种新型的锚杆台车工作臂,以满足隧道锚杆机械化快速施作的需求。 采用钻臂加三工位的组合结构设计,可在隧道内一次定位后实现钻孔、注浆和锚护一体化作业。为求解和验证工作臂的作业空间, 基于改进D-H 法建立工作臂数学模型,并利用Matlab 机器人工具箱Robotic Toolbox,结合蒙特卡洛法求出工作臂的作业空间点云图 和其作业空间参数,并对作业空间边界优化和空间包络,以直观的三维空间曲面图显示出其作业空间。最后,建立隧道断面函数和 其三维曲面模型与锚杆台车工作臂作业空间点云包络图,在Matlab 中进行联合仿真。仿真结果表明锚杆台车工作臂结构设计和作业 空间参数满足隧道断面锚杆施作要求,为同类型的设计和作业空间的求解验证提供了一种可行性方案。
关键词:锚杆台车工作臂,改进D-H 法,作业空间,Matlab 仿真,隧道断面
Working Arm Design and Working Space Analysis and Verification of Tunnel Anchor Rig
Wu Yanlei 1.Chen Xinxin2.Shi Anzheng1.Wang Sanfeng1
( 1.Equipment Branch of China Railway Tunnel Bureau Group Co.,Ltd.,Luoyang,Henan 471009.China;
2.Chendu Metro Operation Co.,Ltd.,Chendu 610081.China )
Abstract:To solve the problems of low efficiency and high risk in the construction of tunnel bolts,a new type of work arm for the anchor carriage was designed to meet the needs of mechanized and rapid construction of tunnel bolts.The working arm of the anchor jumbo could realize the integrated operation of drilling,grouting and anchoring after one positioning in the tunnel by adopting the combined structure design of drill arm and three stations.On this basis,in order to solve and verify the working space of the working arm,the mathematical model of the working arm was established based on the improved D-H method,and the point cloud map of the working space of the working arm and its working space parameters were calculated using the Matlab robot toolbox Robotic Toolbox combined with the Monte Carlo method,and the working space boundary was optimized and the space envelope was displayed with an intuitive three-dimensional space surface map.Finally,the tunnel section function and its 3D surface model and the point cloud envelope of the working space of the anchor jumbo arm were established for joint simulation in Matlab.The simulation results show that the structural design and working space parameters of the working arm of the rockbolt trolley meet the requirements for the construction of the tunnel section rockbolt,and provide a feasible scheme for the structural design of the working arm of the rockbolt trolley and the solution and verification of the working space.
Key words:working arm of tunnel anchor rig;modified D-H method;workspace;Matlab simulation;tunnel section
引言
在钻爆法隧道施工中,机械化配套设备的发展和应 用对隧道的建设具有重要意义[1]。锚杆台车作为钻爆法 隧道开挖的一种配套设备,主要在隧道开挖后的支护作 业中使用,通过人工操作设备实现钻孔、注浆和锚护一 体化作业,可以有效代替人工,提高隧道锚杆施作效率, 快速加固、稳定隧道围岩,提高其承载能力[2]。
在隧道内施工作业时,锚杆台车与凿岩台车的作业工 作面不同,凿岩台车主要对隧道内的掌子面进行钻孔作业,而锚杆台车主要对隧道的边墙面和拱顶面进行钻孔、注浆和锚护作业,其功能和结构相比于凿岩台车较为复杂。
由于国外凿岩机的早期成功研制,推动了国外凿岩 台车和锚杆台车的大量研究、应用和发展,其技术相对 成熟。而目前国内锚杆台车的研制基本处于起步阶段,各个厂家都在针对性地进行研制,主要表现在底盘和工 作臂两大方面,其中底盘技术应用相对普遍和成熟,而 工作臂是技术难点,其研究和应用尚未成熟[3-5] 。而对 于锚杆台车工作臂的设计,其作业空间参数尤为重要,直接影响到锚杆台车是否能有效覆盖整个隧道断面的锚杆施作。文献[6-7 ] 采用了D-H 法和蒙特卡洛法求解了凿岩台车的作业空间点云图。上述文献主要研究了国内凿岩台车和半机械化的锚杆台车的应用,而国内锚杆台车的研制并未完全实现钻孔、注浆和锚护一体机械化作业。对于锚杆台车作业空间的求解,上述文献研究的 是凿岩台车的作业空间求解,并在Matlab 中仿真出凿岩 台车的作业空间点云图,尤其在最为重要的作业空间边 界处,点云离散模糊,并未进行优化,且难以直观地的判断作业空间是否存在盲区和死点。
基于此,本文设计了一种新型的锚杆台车工作臂结 构,通过固定安装在底盘结构上,可以代替人工实现钻 孔、注浆和锚护一体化作业,为求解和验证锚杆台车作 业空间的可行性,同样采用改进D-H 法和蒙特卡洛法求 解了其作业空间点云图,对其边界进行了优化和对点云 图进行了空间包络,并以直观的三维空间曲面图显示出其 作业空间,最后结合相关隧道断面进行验证其作业空间的 可行性,为国内锚杆台车的研制和其作业空间的求解验证 提供一种可行性方案,具有一定的参考借鉴作用。
1 锚杆台车工作臂结构设计
1.1 总体结构设计
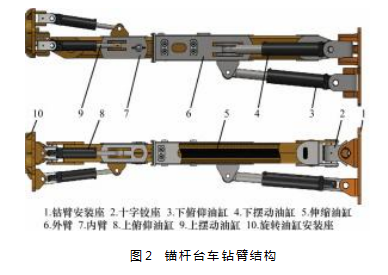
锚杆台车整体由底盘和工作臂两大结构组成,其中工 作臂整体主要由钻臂和三工位组成,其结构如图1所示。钻 臂固定安装在底盘前车架上,其主要通过油缸控制实现作业 位置定位,而三工位通过旋转油缸与钻臂连接,在钻臂准确 定位后,通过工位切换进行钻孔、注浆和锚护作业。
1.2 钻臂结构装置
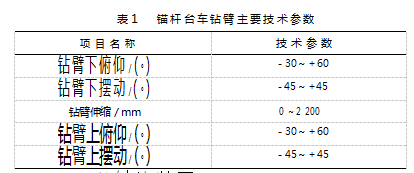
锚杆台车钻臂主要由钻臂安装座、外臂、内臂和旋转油缸安装座等组成,其结构如图2所示。外臂通过十 字铰座与安装座连接,并通过下俯仰油缸和下摆动油缸分别实现钻臂的上下俯仰和左右摆动运动;内臂嵌入外臂内,通过伸缩油缸连接并实现伸缩运动;内臂前端与 旋转油缸安装座通过十字铰座连接,并通过上俯仰油缸和上摆动油缸实现旋转油缸安装座的上下俯仰和左右摆 动运动。钻臂主要技术参数如表1所示。
1.3 三工位结构装置
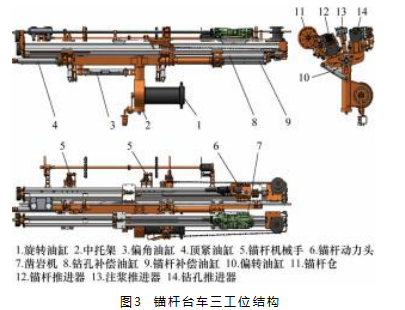
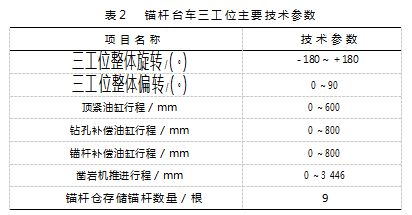
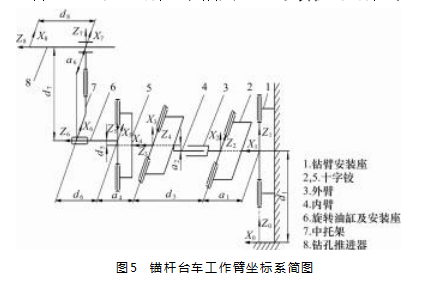
锚杆台车三工位主要由旋转油缸、中托架、钻孔推进器、注浆推进器、锚杆推进器、锚杆机械手和锚杆仓等组成,其结构如图3所示,三工位整体通过旋转油缸 与钻臂的旋转油缸安装座实现连接,旋转油缸可带动整 个三工位进行旋转,旋转油缸的前端连接中托架,中托 架自身可通过偏角油缸进行摆动,中托架上安装钻孔推 进器、注浆推进器和锚杆推进器3个工位,分别在同一 个同心圆上的3个位置,可通过偏转油缸进行工位切换,实现钻孔、注浆和锚护作业。
三工位正向切换运动简图如图4所示,工作时,顶 紧油缸先伸出初次顶紧岩壁,然后钻孔补偿油缸带动钻 孔推进器向前推进并二次顶紧岩壁,之后凿岩机向前推 进打孔并退回,完成1工位的钻孔作业;紧接着偏转油 缸带动2工位切换至1工位置,进行注浆,完成2工位的注浆作业;最后偏转油缸带动3工位切换至1工位位置,先由锚杆补偿油缸带动锚杆推进器向前推进并二次顶紧岩壁,然后锚杆机械手抓取锚杆仓的锚杆并送至 锚杆推进器上的锚杆动力头处,再由锚杆动力头向前推 进将锚杆插入1工位钻好的孔内,最后锁紧锚杆并退回,完成整根锚杆的施作。三工位主要技术参数如表2所示。
2 锚杆台车工作臂运动学分析
以锚杆台车工作臂为研究对象,建立相关数学模型,并对其空间位姿和作业范围进行求解。锚杆台车的3个工位工作时,都需要将工位2 和工位3转换到工位1 的 位置。因此在对其空间位置分析时,可以简化结构模型,只考虑工位1的末端位置。
2.1 D-H 法建模
锚杆台车工作臂是由一系列连杆连接起来的机械手臂,因此可以采用D-H 法对其建立相关运动学数学模 型[8]。D-H 法通过在每一个连杆相互连接位置处建立一 个坐标系,再利用齐次坐标变换矩阵去建立两个坐标系 之间的位置关系[9]。
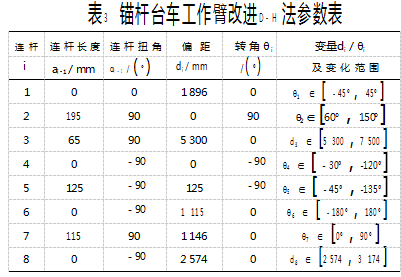
目前,D-H 法主要有标准D-H (Standard D-H ) 法和 改进D-H (Modified D-H ) 法。由于两种方法在连杆中建 立的坐标系位置不同,因此其使用场合有所区别。标准D- H 法受坐标系建立位置的影响,主要用于开链结构机器手,对树状或闭链结构的机器手会因坐标系的位置重合产生歧义;而改进D-H 法不受坐标系位置建立的影响,对开链、 树状、闭链结构的机器手都适用[10]。因此,这里采用改进 D-H 法对锚杆台车工作臂建立运动学数学模型,其相应的 连杆坐标系如图5所示,相关的D-H 参数如表3所示。
2.2 正运动学求解
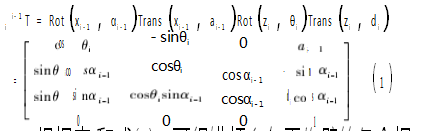
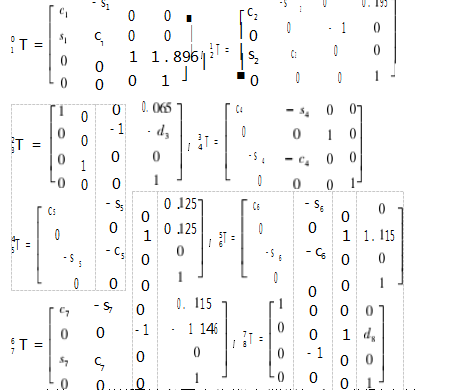
建立了锚杆台车工作臂的坐标系简图和相关D-H 参 数表后,要求锚杆台车工作臂末端坐标系相对于基座坐 标系的位置和姿态,首先要建立相邻两个相邻连杆坐标 系{i - 1} 和{i} 的关系,根据改进D-H 法可知,其两者之间的关系为齐次坐标变换矩阵i T,见式(1 ) 。根据表3和式(1 ),可得锚杆台车工作臂的各个相邻连杆坐标系之间的变换矩阵i T
最后,得出锚杆台车工作臂末端坐标系O8 相对于基 座坐标系O0 的位姿变换矩阵0(8)T,见式(2 )。
0 T =0 T1 T2 T3 T4 T5 T6 T7 T
式中R为末端坐标系。相对于基座坐标系的姿态,P为末端坐标系。相对于基座坐标系的位置。
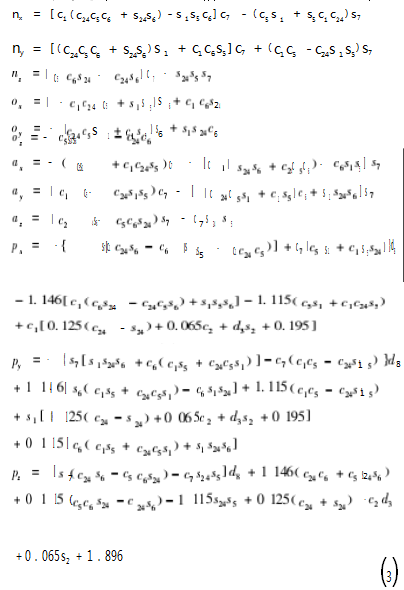
式(3 ) 为锚杆台车工作臂运动学分析的全部基本方程, 式中:s i = sinθi;ci = cosθi;s ij = sin ( θi + θj );cij =cos ( θi + θj ) 。
将表(3 ) 的参数代入各相邻连杆坐标系的变换矩 阵,解出工作臂末端坐标系O8 相对于基座坐标系O0 的 初始位置位姿矩阵8(0)T,见式(4 )。
工作臂末端坐标系O8 相对于基座坐标系O0 的空间位置坐标为8(0)P = ( 9.309.-0.115.3.232) T,与工作臂实际模型的末端位置相一致。
2.3 Matlab 仿真
利用Matlab 机器人工具箱Robotic Toolbox [ 11 ],根据台车工作臂相关D-H 参数表,在Matlab 中进行编程,可 快速建立锚杆台车工作臂机器人模型,从而对其进行仿真验证。
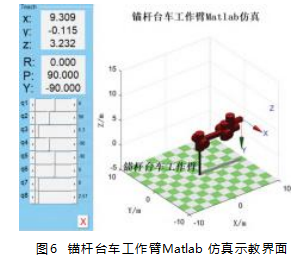
图6所示为锚杆台车工作臂的Matlab 仿真结果示意图,其中qi 为第i个关节变量,可以在仿真界面进行拖 动更改关节变量,并在右侧对应界面显示模型对应的姿态。 由图还可得出,台车工作臂末端坐标系O8 相对于基座坐标 系O0 的空间位置坐标为(-9.309.-0.115.3.232),姿态 为:绕X 轴旋转Y=-90°;绕Y轴旋转P= 90°;绕Z 轴旋转R = 0°,其仿真结果均与式(4 ) 中8(0)T 计算结果 一致,验证了台车工作臂D-H 参数建模的准确性。
3 锚杆台车工作臂作业空间计算
锚杆台车工作臂的作业空间是锚杆台车的重要指标之一,它决定了锚杆台车的工作臂是否可在现场的隧道 内进行全方位锚杆施作。目前,解决机械臂运动空间的 方法主要有图解法、解析法和数值法[12] 。其中图解法和 解析法随着关节数目的增多,求解过程复杂性增加,不具有通用性。而数值法中基于随机概率的蒙特卡洛法( Monte Carlo ),求解机器人的运动空间[13],可省去复杂 的推算过程且通用性强,易于图形直观显现。
蒙特卡洛法是一种借助于随机抽样来解决数学问题的数值方法。而锚杆台车工作臂的各个关节变量di 和θi是相互独立的,因此可利用rand 函数产生[0.1 ] 的随机 数[14],在各个关节变量的范围内随机取值,见式(5 ):
式中:n 为随机次数。
将各个关节变量θi和di 代入正运动学方程中,便可 求出锚杆台车末端位置8(0)P 的空间点集合S,所有末端随机点的集合就构成了机械臂的作业空间。
3.1 作业空间求解
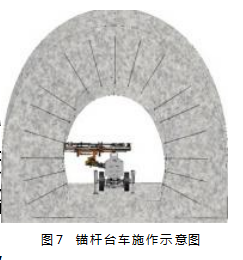
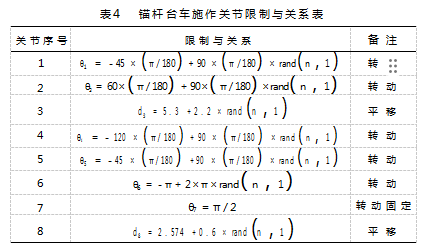
根据锚杆台车工作臂的运动关系和现场锚杆实际应用,如图7 所示,锚杆台车进行锚杆施作时,需要将关节6绕关节7 旋转90°,因此需要对各个关节的限制与关系进行相应调整,再结合式(5 ) 写出对应关节的随机取值函数,如表4
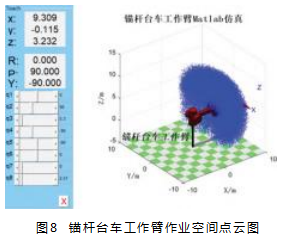
所示。根据表4.利用蒙特卡洛法结合D-H 参数建模,在 Matlab 中进行编程,求解出锚杆台车工作臂作业空间点 云图,如图8所示。
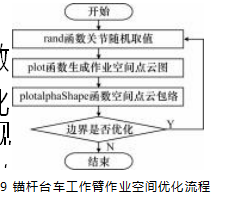
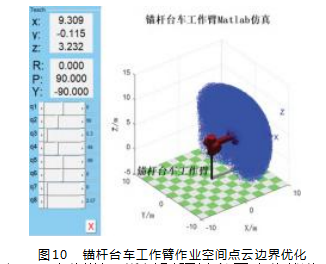
3.2 作业空间优化
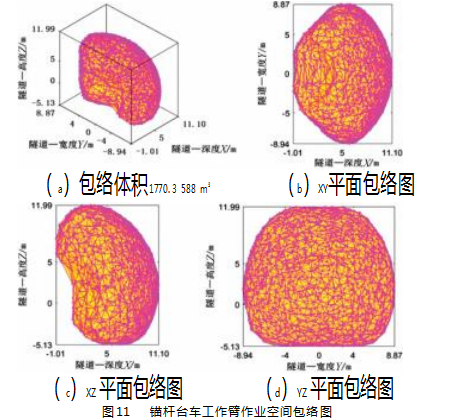
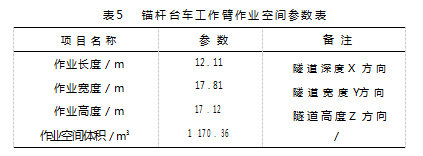
锚杆台车工作臂作业空间点云图,虽大致呈现了作业空间的分布情况,但是由于离散化的特点,并未直观显现作业空间的具体分布,尤其在边界处空间点云较为离散模糊。因此对其缺点,可以对边界处的点云优 化,增加其数量,再对整体作业空间点云图进行包 络[15],将离散的点组合成一个三维立体模型,实现作业空间的有效分析。如图9~ 10 所示。在Matlab 中编程,通过对锚杆台车工作臂作业空间 优化仿真计算,得出作业空间点云包络图和相关作业参 数,如图11 和表5所示。
4 锚杆台车工作臂作业空间验证
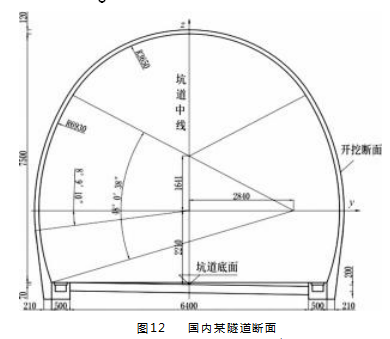
锚杆台车最终要应用于现场施工隧道,其作业空间要能覆盖整个隧道断面。图11 中锚杆台车工作臂作业点云包络空间并不是规则的几何体,因此对一个确定的隧 道断面,如图12 所示,无法直观判断台车作业空间在给 定一隧道断面后是否存在盲区和死点。因此,可以将隧道模型与锚杆台车作业空间包络图联合进行仿真来验证 其作业空间。
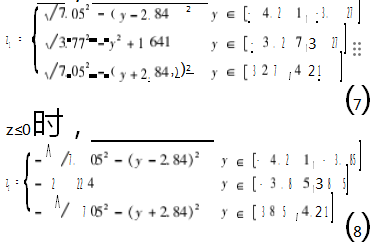
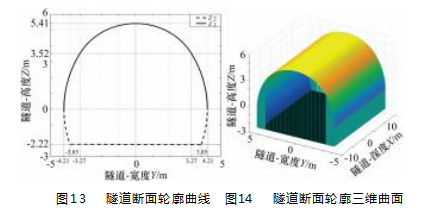
根据隧道断面图纸相关参数,建立坐标系,由此得出隧道断面轮廓曲线函数,见式(7 ) 和式(8 ) 。
根据隧道断面轮廓曲线函数在Matlab 中作出其断面轮廓曲线图,如图13 所示,并利用Meshz 函数生成隧道 断面轮廓三维曲面用来模拟隧道模型,如图14 所示。
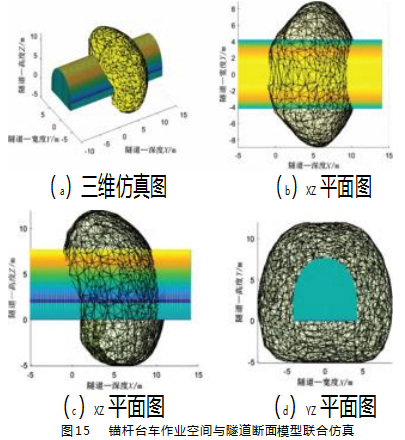
最后,将隧道断面轮廓三维曲面图14 与锚杆台车工 作臂作业空间包络图11 联合仿真,如图15 所示,可以 看出锚杆台车工作臂作业空间能覆盖该隧道断面轮廓,验证了该锚杆台车工作臂设计的可行性。
5 结束语
本文设计了一种新型的隧道锚杆台车工作臂结构,其 主要利用三工位和钻臂两大组成结构进行配合作业,通过 钻臂的移动和三工位的工位切换,可实现一次定位完成钻 孔、注浆和锚护一体化作业,提高隧道锚杆施作效率。
通过利用改进D-H 法参数建模,对锚杆台车工作臂 进行了正运动学分析,结合蒙特卡洛法(Monte Carlo ), 计算了台车工作臂的作业空间点云图和作业空间参数, 对其作业边界进行了优化,并利用空间包络法将台车作业空间以直观的三维空间曲面图显示。
为验证锚杆台车工作臂作业范围的可行性,通过建 立隧道断面轮廓曲线函数,生成相应的隧道断面轮廓三 维曲面来模拟隧道,并和台车工作臂的作业空间联合进 行仿真,验证了锚杆台车工作臂作业范围的可行性。
针对此锚杆台车工作臂的结构设计和作业空间求解, 下一步将结合机器人动力学、智能控制和传感技术,对 此结构进行优化和改进,提高隧道锚杆台车工作臂的自 动化程度,使之更好地服务于现场隧道锚杆的施作。
参考文献:
[ 1 ] 刘飞香,姬海东,肖正航.川藏铁路隧道钻爆法施工成套装 备技术体系研究[J ]. 隧道建设(中英文),2021.41 ( 8 ): 1281-1289.
[ 2 ] 杨克文,吕刚,于晨昀,等.锚杆在隧道初期支护体系中的作用机理分析[J ].铁路勘察,2019.45 ( 1 ):47-52.
[ 3 ] 吴昊骏,纪洪广,龚敏,等.我国地下矿山凿岩装备应用现状与凿岩智能化发展方向[ J ].金属矿山,2021 ( 1 ):185-201.
[ 4 ] 周远航,刘瑞庆,李大伟.一种新型隧道锚杆台车设计[J].机电工程技术,2018.47 ( 3 ):43-45.
[ 5 ] 范要辉.锚杆台车自动化控制研究与展望[ J ].煤矿机械,2021.42 ( 11 ):70-72.
[ 6 ] 刘泽鑫,管会生.凿岩台车钻臂工作空间求解[ J ].机械,2012.39 ( 5 ):9 -11.
[ 7 ] 林智秋,罗红波,赵康,等.液压凿岩台车钻臂工作空间分析及仿真[J].机械设计与制造,2019 ( 8 ):165-167.
[ 8 ] 李瑞霞,李粉霞,杨洁明,等.基于D-H 法的串联机械手臂工作空间分析[J].机床与液压,2015.43 (21 ):70-73.
[ 9 ] 李小伟,高清冉.基于Matlab 的工业机器人运动学分析与仿真[J ]. 内燃机与配件,2022 ( 2 ):233-237.
[ 10 ] 程伟,屈福康,肖金.改进的D-H 参数下串联机器人建模与运动学分析[ J ]. 自动化技术与应用,2022.41 (5 ):97-99.
[ 11 ] 唐越,郑金辉,门正兴,等.工业机器人D-H 建模与运 动仿真[J ].中国重型装备,2020 ( 1 ):31-32.
[ 12 ] 赵亚川,李庆杰,高世卿,等.一种超冗余机械臂的工作 空间求解方法[ J ]. 电子机械工程,2019.35 ( 6 ):61 -64.
[ 13 ] 周律,周昱明,汪亮,等.基于蒙特卡罗方法的双臂机器 人工作空间分析[J ].机械传动,2014.38 (6 ):85-87.
[ 14 ] 徐振邦,赵智远,贺帅,等.机器人工作空间求解的蒙 特卡洛法改进和体积求取[ J ].光学精密工程,2018. 26 ( 11 ):2703-2713.
[ 15 ] 张鹏程,张铁.基于包络法六自由度工业机器人工作空间的分析[J].机械设计与制造,2010 ( 10):164-166.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61351.html