SCI论文(www.lunwensci.com)
摘要: 目前农产品无损检测方法单一, 导致分拣分级精度不高, 亟须提升批量动态检测精度 。针对梅州蜜柚检测, 采用光谱检测、 机器视觉 、动态称重和人机交互等技术, 设计了一款智能驱动无损动态检测装置 。 阐述了装置关键结构参数与选型 、搭建方法与 工作原理, 并开展了性能测试 。测试分析结果表明, 该装置可采集和融合柚果特征波长 、 图像特征 、和动态质量等多特征信息, 并自主完成多源异质信息融合, 通过柚果内部品质深层解析模型——广义神经网络模型, 再经样本训练 、规则判别 、算法寻优和 深度学习, 快速完成内部品质指标的精确预测和验证 。说明所设计的智能驱动无损动态装置可以快速 、高效和准确地完成柚果品 质检测, 满足性能需求。
A Nondestructive Testing Device of Pomelo Quality Based on Intelligent-driven Mode
Sun Xiaopeng1. Wu Liangjun1. Che Zhi1. Ma Chuangli2. Guo Hailong1 ※
( 1. Department of Automobile and Engineering Machinery, Guangdong Communication Polytechnic, Guangzhou 510650. China;2. Guangna New Energy Technology (Guangzhou) Co., Ltd., Guangzhou 510530. China)
Abstract: At present, there is not many non-destructive testing methods for agricultural products, resulting in low sorting and gradingaccuracy. It is urgent to improve the accuracy of batch dynamic testing . By adopting spectral detection, machine vision, dynamic weighing, andhuman-machine interaction, a smart driven non-destructive dynamic testing device was designed for Meizhou honey pomelo testing . The keystructural parameters, type selection, construction methods and working principles of the device were elaborated, and performance testing wasconducted. The test analysis results show that the device can collect and integrate multiple feature information such as pomelo fruit featurewavelength, image feature, and dynamic quality, and independently complete multi-source heterogeneous information integration . Through thedeep analysis model - generalized neural network model, and through sample training, rule discrimination, algorithm optimization, and deeplearning, the accurate prediction and verification of internal quality indicators can be quickly completed . The intelligent driving non-destructive dynamic device designed can quickly, efficiently, and accurately complete the quality inspection of pomelo fruit, meeting performance requirements.
Key words: intelligence-driven; nondestructive dynamic testing; pomelo; feedback correction mechanism
0 引言
柚 ( Citrus Maxima ) 是芸香科柑橘属, 俗称香栾 、 文旦和胡柑等, 广泛分布于广东和福建地区, 果面光泽、 汁水饱满, 呈甜或酸甜味, 由于其营养价值丰富且口感 极佳, 广受消费者青睐[ 1]。
近年来, 国内外研究人员在不损坏被测样本使用性 能和内部组织的前提下, 利用声、光、电、热、磁等方法, 检测其内部化学成分及外部物理特性变化, 在农产品品质 检测方面得以广泛应用[2] 。其中, 可见-近红外透射光谱具 有较强的穿透性, 通过分子振动的非谐振性, 可使其从基 态向高能级跃迁, 通过测量物质吸收的近红外光的能量大 小, 反馈被测样本的内部特征[3]; 机器视觉技术搭建的图 像处理系统用于果品检测时, 对样本不产生机械损伤, 且可获取样本的颜色、大小、形状、纹理和表面损伤等特征 信息[4]; 在水果动态检测中, 分选机可通过动态称重系统, 对样本单个独立称重, 实现快速 、准确和稳定检测[5]。
本文基于智能驱动模式, 将可见-近红外透射光谱、 机器视觉和动态称重等技术用于检测装置的异质信息融 合和交互, 设计一种基于多源信息融合的智能驱动无损 动态检测装置, 以达到对批量柚果品质快速无损检测和 分级分选, 从而提升检测效率和精度 。该装置可用于对 柚子类果大皮厚的水果品质检测, 是一种新的智能驱动 无损检测装备。
1 材料与方法
1.1 材料与测量仪器
材料取自广东梅州地区挂果成熟的红肉蜜柚 100 个。
测量仪器包括: PAL-Grape Must 型数显折射仪, 测量范 围为 0.0~53.0 %, 测试时间为 3 s, 误差为 0.2%; 酸碱中 和滴定仪; HTP312 型天平秤。
1.2 关键器件与选型
动力系统采用卧式变频减速电机 (型号为 TCH28- 750-30SB, 减速比 i=30 ∶ 1 ) 和欧姆龙变频器 (型号为 3G2JZ-AB007. 功率为 0.75 kW)。 皮带传送系统通过累 计光电编码器输出脉冲次数反映当前点击的位置增量[6], 因此通过安装增量式旋转编码器获取信息, 设置不同运 行速度用于动态梯度检测 。为降低运输过程对柚果产生 外部损伤概率, 需配合装置样机的动态称重 、图像获取 和光谱采集, 以提高数据准确性和稳定性。
1.2. 1 动态称重系统
相较于静态称重, 动态称重需避免传输过程中的振 动 、冲击 、偏载等因素, 其固定载荷和变动载荷的总和 需要大于称重传感器额定载荷的 70%[7], 因此采用电阻 应变式称重传感器 (型号为 HBW PW6DC3MR, 额定载 荷 10 kg, 固有频率 500 Hz )。 为减小对称重传感器的振 动干扰, 提升频谱分辨率, 系统内采用压电式加速度传 感器 (型号为 352C33)。 称重传感器输出毫伏级电压信 号, 信号调理模块采用 TR200H 高精度称重变送器, 放 大滤波等调理后变成标准电压/电流信号。
1.2.2 机器视觉系统
机器视觉系统内, 图像获取通过安装在电机上的霍 尔传感器与图像采集箱体前部的光电传感器和传送托盘 上安装的电磁铁组成, 当接近开关检测到柚果时会将触 发信号发送给相机实现触发拍照[8] 。系统设备包括: 光 源 、暗箱 、彩色高速工业相机 (型号为 OSG230- 150UM) 及 M1224-MPW2 型 镜 头 ( F2.4 、f12 mm 2/3)、 接 近 开 关 、主控计算机和电器控制柜等。
1.2.3 光谱采集系统
光谱采集系统, 可分为 3 大部分: 光路系统 、电路 系统和人机交互界面软件[9] 。其中, 光路系统由光照系 统 、分光系统 、积分球 、探测器 、传感器光谱仪和光纤 等组成; 电路系统由检测电路 、单片机和波长控制驱动 电路等组成 。光谱采集试验时, 需配套自研发聚甲醛树 脂材质柚果托盘共同使用[10]。
在结构设计时, 光照系统呈环形, 每 30 °布置 1 组 光源 ( 100 W 石英卤素灯), 共计 12 组, 以达到试验对 光源强度的不同要求; 光源可以上下调节, 调节范围为 90 °, 有利于光源聚焦 。光谱检测室内设置有 8 组风扇, 可实现局部降温且效果显著, 保证检测室内温度相对稳 定, 避免对柚果的灼伤 。光谱仪选用美国海洋光学公司 的 QE-Pro 型光谱仪, 测量波长范围为 400 ~ 1 100 nm, 光谱分辨率为 0. 14~7.7 nm, 信噪比为 1 000 ∶ 1[ 11]。
电路系统包括: 信号检测与提取电路模块 、信号处 理模块和电源模块 。用于将频域光谱信号转化为电信 号, 通过前置放大 、带通滤波 、相敏检波和模数转换等 方法, 实现信号的放大 、窄带滤波和信噪比提升, 进而 提取出有效光谱信号, 最后通过人机交互软件显示测量 结果, 通过串口通信电路实现系统和上位机之间的通信 和控制。
1.3 样机搭建与功能实现
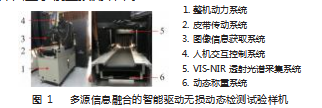
依据关键器件与选型, 按照结构设计要求, 试制了 多源信息融合的智能驱动无损动态检测装置的样机如图 1 所示 。样机由中控系统启动伺服电机后, 进入智能驱 动模式, 完成光谱校正 、光谱仪和工业相机参数设定, 柚果配以托盘通过皮带传送, 分别通过动态称重 、机器 视觉系统, 光谱检测系统进行无损动态检测, 数据采集 后传输至中控系统进行储存和分析, 人机交互系统控制 界面显示模型预测结果。
样机主要实现以下功能: ( 1 ) 依靠称重传感器 、信 号调理电路 、数据采集与处理装置, 显示装置和执行机 构等, 实现信息获取 、转化 、处理和输出; (2 ) 依据机 器视觉技术进行相机标定, 实时获取柚果的图像信息后, 并依次完成图像预处理 、阈值二值化 、边界检测 、 目标 区域像素点提取和像素-尺度转化等, 提取和估算物理 特征; (3 ) 依据光谱检测技术, 以透射率为参考值, 采 集样本在 400 ~ 1 100 nm 光谱数据并存储; (4 ) 动态传送 需具备 0. 1 、0.3 、0.5 m/s 3 个传动速度, 样本及配套托盘 完成无损动态检测工作; (5 ) 人机交互控制系统按照试 验要求完成数据处理和模型分析, 完成果品品质预测和 判定。
1.4 反馈校正机制与评价
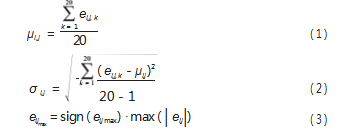
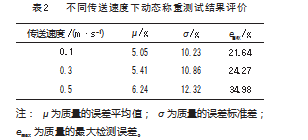
反馈校正机制与评价包括: 动态称重测量评价 、图 像评价和动态光谱稳定性评价 。首先, 动态称重测量评 价, 需计算动态称重值与静态称重值之间的误差平均值、 误差标准差和最大检测误差, 如式 ( 1 ) ~ ( 3 ) 所示[7]。
式中: μi, j 为第 i 个被测果品质量在速度 vj 下的误差平均 值, g; σi, j 为第 i 个被测果品质量在速度 vj 下的误差标准 差, g; ei, jmax为第 i 个被测果品质量在速度 vj 下的最大检 测误差, g, ei, j 为 20次测样的误差向量。
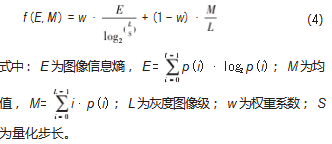
其次, 图像评价在图像获取 、编码压缩和传输等领 域具有重要意义[12] 。本文采用客观评价法, 通过系统感 知和数字模型评价图像[13], 使用无参考评价 (完全依靠 待评测图像信息进行评价), 经计算后的量化指标 (图像 清晰度) 对图像质量评估, 如式 ( 4) 所示[14]。
最后, 进行动态光谱测试和光谱稳定性评价 。光谱 的动态采集依据传输速度 、积分时间 、平滑次数 、光照 强度和入射角度等参数[15] 。选择最佳光照强度 、光源距 离和入射角度依次设置为 1 000 W、27 cm 和 45 ° 。合理 的积分时间和平滑宽度可保证光谱的充分采集[16] 。以变 异系数 ( Coefficient of Variation, Cv ) 评价其光谱稳定 性, 如公式 5所示[17]。
1.5 模型构建与机理
GRNN 神经网络 (Generalized Regression Neural Net‐ work) 是一种径向基函数神经网络, 具备很强的非线性 映射能力, 高度的容错性及健壮性, 适用于解决非线性 问题, 在图像处理和模式识别等领域普及[18] 。GRNN 结 构依次分为: 输入层 、模式层 、求和层和输出层。
其中径向基函数 (Radial Basis Function, RBF) 属 于局部逼近神经网络, 对输入的某个局部区域, 通过连 接权系数或少量自适应可调节参数影响输出数据, 其传 递函数包括: Gaussian、reflected sigmoid 和逆 Multiquad‐ ric等[19], 其神经元模型结构如图 2所示。
2 试验结果与分析
2.1 动态称重的性能测试与影响分析
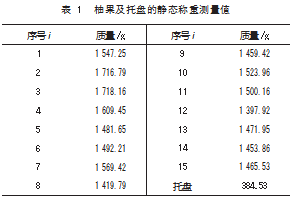
为探究不同传送速度下对柚果动态称重的影响, 随 机选取 15个梅州蜜柚, 并使用电子秤进行静态称重, 样 本及传送托盘的质量, 如表 1所示。
动态称重测试之前, 先对称重传感器进行校准, 即 采样数据的标度变换, 用于求得从称重传感器输出的电压 值到被称重质量的转换系数 k, 被称果品质量公式如下[3]:
式中: M 为被测果品的质量估算值, g; Mref 为用于校准 的标准砝码质量 ( 1 000 g); U0 为空载静态下的输出电 压, V; Uref为加载标准砝码下的输出电压, V; U 为动态 称重算法估算质量与被测果品质量成一定比例关系的输 出电压, V。
由式 ( 6) 可知, U0 和 Uref 可由称重传感器校准得到, 因此通过动态称重算法从非稳态且受干扰的称重传 感器输出信号中测得 U, 即可可得到最终的 M。
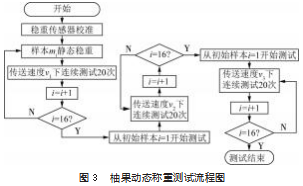
皮带传送系统以不同的传送速度对每个试验样本在 同一速率下称重 20 次, 分别以 v1=0.1 m/s、v2=0.3 m/s 和 v3=0.5 m/s进行测试, 测试流程如图 3所示。
动态称重的理想信号是个短时梯形信号, 而实际上, 载有柚果的托盘并不能立刻完全进入和离开动态称重段, 因此存在过渡时间, 在 3 种皮带传送速度 ( 0.1、0.3、 0.5 m/s) 下过渡时间依次为 0.40、0.34、0.28 s。动态称重系统的机械振动频率一般在200 Hz 以内, 且可通过一个 低通滤波器滤除, 数据采集的采样频率设置为 2 043 Hz, 依照上述传送速度在该频率下的持续采用时间依次是 0.22、0.19、0.17 s, 满足试验要求。
对静态称重后的每个样本再分别进行 20次动态称重 试验, 然后依据动态称重精度的评价指标评估测试结果, 如表 2所示。
2.2 图像获取的性能测试与影响分析
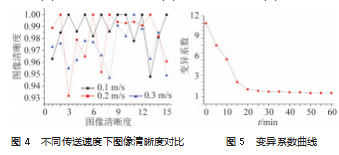
对完成动态称重的样本进行图像获取和图像清晰度 计算, f ( E, M) 的值越接近于 1. 说明图像清晰度越 好, 图像质量更佳, 样本图像的评价结果如图 4所示。
由图 4 可知, 传送速度为 0.1 m/s 时, 图像清晰度最佳; 传送速度为 0.5 m/s 时, 图像清晰度最弱 。不同传送 速度下图像清晰度均较高, 均不低于 0.93. 且具有随机 性, 图像信息获取系统中高速工业相机可弥补传送速度 对图像获取的影响。
2.3 光谱采集的性能测试与影响分析
使用聚四氟乙烯材质的标准白板为被测物, 选择上 述最佳光照强度 、光源距离和入射角度参数, 采集并记 录光谱能量值: 吸光度 (Absorbance)。 开机后立即测 试, 测试时间为 1 h, 相同时间间隔 ( 5 min) 试验共计 测试 13次, 其 v(C)随时间的变化规律如图 5所示。
结果表明: 光谱采集系统在 20 min后趋于稳定状态, 证明智能驱动无损动态检测试验样机开启后需要相应时 间的热机准备方可进行试验。
完成上述最优环境参数设定和光谱稳定性测试后, 动态光谱只需要采集积分时间 、平滑宽度和在线速度 。 设置变频器频率, 调整转速, 将皮带传送速度分别设置 为 0.1、0.3、0.5 m/s。对已完成动态称重和图像获取的样本, 继续开展动态光谱采集试验 。以 0.3 m/s 为例, 其 可见-短波近红外透射光谱如图 6所示。
图中, I 代表积分时间 (Integration Time), S 代表平 滑宽度 (Smooth Width), 分别设置 4 个梯度进行测试, I 由 50 ms依次提高至 200 ms, 随着积分时间的增加, 接 收到的光信号越强, 光谱透过率越高 。数据表明: 设置 QE-pro 光谱仪的积分时间为 200 ms、平滑宽度为 3. 在 动态光谱检测中为最优参数设置 。以 0.1 m/s 和 0.5 m/s传 送速度, 重复上述试验, 结果相似。
2.4 模型预测和验证
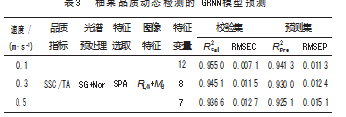
采用 Kennard-Stone方法[6]按 2 ∶ 1将样本划分为校验 集和预测集 。原始光谱经 Savitzky-Golay 多项式平滑和面 积归一化 ( SG+Nor) 光谱预处理, SPA 光谱特征提取, 然后与图像特征和动态质量进行数据级融合, 以融合数 据作为模型输入端, 将需检测样本的内部品质—糖酸比 ( SSC/TA) 作为模型输出端, 采用决策级数据融合进行 广义神经网络 ( GRNN) 模型分析和预测, 以评估样机 的性能优劣, 如表 3所示。
综述所述, 随速度增加, 决定系数 ( R2 ) 依次下降, 均方根误差 ( RMSE) 逐渐增大, 影响模型校验与预测 结果 。结果表明: 在 0.1 m/s 运行速度下, 模型校验与 预测精度最高 。校验集决定系数 ( R c(2)al) 为 0.955 0. 校 验集均方根误差 ( RMSEC) 为 0.007 1; 模型预测集决定系数 ( R p(2)re) 为 0.941 3. 预测集均方根误差 ( RMSEP ) 为 0.011 3.
3 结束语
本文通过研发多源信息融合的智能驱动无损动态检 测试验样机, 阐述了其动态检测系统内关键器件与选型, 测试了试验样机中动态称重系统 、机器视觉系统和光谱 采集系统的性能, 以及开展了样机检测精度影响因素分 析 。基于样机试验和数据分析, 构建了多源信息融合的 柚果品质预测 GRNN 模型, 该模型可快速 、准确且有效 预测柚果糖酸比 ( SSC/TA ) 品质, 为柚果内部品质分级 检测提供了理论基础和技术支撑 。结果表明: 智能驱动 模式下, 试验样机在动态传输中, 可快速完成梅州蜜柚 批量无损检测和品质预测, 该研究以期为农产品动态无 损检测及智能装备研发提供参考。
参考文献:
[ 1] 孙潇鹏, 刘灿灿, 陆华忠, 等 . 基于可见-近红外透射光谱的蜜 柚检测中影响因素分析[J]. 包装与食品机械, 2022. 40(4): 1-7.
[2] 马佳佳, 王克强 . 水果品质光学无损检测技术研究进展[J]. 食 品工业科技, 2021. 42(23): 427-437.
[3] 张佳薇, 谈志强, 杨春梅, 等 . 基于石英增强型光声光谱技术 的植株固碳检测系统[J]. 森林工程, 2021. 37(6): 62-67.
[4] ZHANG C, ZOU K, PAN Y. A method of apple image segmenta ‐ tion based on color-texture fusion feature and machine learning [J]. Agronomy, 2020. 10(7): 972.
[5] 杨春伟 . 基于 DSP 的多通道禽蛋动态称重及分级控制研究与 开发[D]. 杭州: 浙江大学, 2016.
[6] 张涛, 杨振强, 王晓旭 . 应用 eQEP 及编码器测量电机位置与 速度的方法[J]. 电气传动, 2011. 41(4): 48-51.
[7] 张剑一 . 动态称重数据处理算法及其在禽蛋和类球形水果分 选中的应用研究[D]. 杭州: 浙江大学, 2017.
[8] 吕强, 张明, 邓烈, 等 . 一种流动式柑橘品质现场检测分级方 法 CN109332200A[P]. 2019-02- 15.
[9]余念, 于亚萍, 刘源, 等 . 蛋品质图像检测自动传送装置的设 计[J]. 机电工程技术, 2022. 51(9): 108- 111.
[10] 孙潇鹏, 徐赛, 陆华忠 . 基于光谱技术与光学仿真的柚果在线检测托盘设计与试验[J]. 食品与机械, 2019. 35(12): 56-62.
[ 11] 孙潇鹏, 刘灿灿, 陆华忠, 等 . 基于近红外透射光谱与机器视 觉的蜜柚汁胞粒化分级检测[J]. 食品科学技术学报 , 2021. 39(1): 37-45.
[ 12] 李佳, 郑元林, 廖开阳, 等 . 基于显著性深层特征的无参考图像质量评价算法[J]. 计算机应用, 2022. 42(6): 1957- 1964.
[13] 蒋刚毅 , 黄大江 , 王旭 , 等 . 图像质量评价方法研究进展[J]. 电子与信息学报, 2010. 32(1): 219-226.
[ 14] 刘建武, 王希常, 刘江 . 信息熵与文档图像的清晰度分析[J]. 枣庄学院学报, 2007(5): 67-69.
[15] 毕智健 . 哈密瓜糖度可见近红外光谱在线检测系统设计研 究[D]. 石河子: 石河子大学, 2017.
[16] 王建伟, 陶飞 . 近红外光谱技术在农产品检测中的应用研究 进展[J]. 安徽农学通报, 2021. 27( 17): 155- 158.
[ 17] 于潇禹 . 近红外土壤养分含量在线实时检测系统及关键技 术研究[D]. 哈尔滨: 哈尔滨理工大学, 2015.
[18] SUN X P, XU S, LU H Z. Non-destructive identification and es ‐ timation of granulation in honey pomelo using visible and near- infrared transmittance spectroscopy combined with machine vi ‐ sion technology[J]. Applied Sciences, 2020. 10(16): 5399.
[19] 孔丹丹, 郑海生, 杜浩, 等 . 基于径向基函数模型的某混合动 力车型怠速声品质优化[J]. 汽车技术, 2022(11): 47-53.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61036.html