SCI论文(www.lunwensci.com)
摘要:绝缘子清洗机器人在绝缘子串上开展清洗作业时,可能会影响输电线路上的静磁场环境,导致周围静磁场产生变化,其磁场强度可能越限。因此需要开展机器人绝缘子串清洗作业的静磁场分析。针对机器人清洗110 kV输电线路上的水平悬式绝缘子情况,基于ANSYS有限元分析软件分析机器人到达绝缘子串3处位置时的静磁场强度大小以及分布情况,同时为了降低机器人对周围静磁场环境的影响,对机器人的制作材料进行了优化。静磁场分析结果表明,在110 kV输电线的输送功率为10~50 MW范围内,机器人移动到绝缘子串3处位置时的磁感应强度均达到了限值,比较了铝质材料和镀铜材料的静磁场强度,结果表明,机器人制造材料更换为磁导率相对较低的镀铜材料时,可以减少周围磁场强度的大小,缩小机器人移动到不同位置时的磁场强度相对变化量,降低机器人对输电线路电磁环境的影响。
关键词:绝缘子清洗机器人,110 kV输电线路,水平悬式绝缘子,静磁场分析
Static Magnetic Field Analysis and Optimization of Insulator Cleaning Robot
Liang Zhilong,Huang Hui,Wu Jianqiang,Xiao Hao,Wang Jiahao(Intelligent Manufacturing Department,Wuyi University,Jiangmen,Guangdong 529020,China)
Abstract:When the insulator cleaning robot carries out cleaning operation on the insulator string,it may affect the static magnetic field environment on the transmission line,resulting in changes in the surrounding static magnetic field,and its magnetic field strength may exceed the limit.Therefore,it is necessary to carry out static magnetic field analysis of robot insulator string cleaning operation.In view of the robot cleaning the horizontal suspension insulator on the 110 kV transmission line,based on the ANSYS finite element analysis software,the magnitude and distribution of the static magnetic field intensity when the robot reaches the three positions of the insulator string were analyzed;at the same time,in order to reduce the impact of the robot on the surrounding static magnetic field environment,the manufacturing materials of the robot were optimized.The static magnetic field analysis results show that the magnetic induction intensity of the robot moving to three positions of the insulator string reaches the limit value when the transmission power of the 110 kV transmission line is 10~50 MW.The static magnetic field strength of aluminum material and copper-plated material was compared.The results show that when the robot manufacturing material is replaced with copper-plated material with relatively low permeability,the size of the surrounding magnetic field strength can be reduced,the relative variation of the magnetic field strength when the robot moves to different positions can be reduced,and the impact of the robot on the electromagnetic environment of the transmission line can be reduced.
Key words:insulator cleaning robot;110 kV transmission line;horizontal suspension insulator;static magnetic field analysis
0引言
目前随着智能化的发展,越来越多行业使用或设计自动化设备,替代人完成在特殊环境等方面的工作。同时人们越来越追求设备的质量及关注设备自身是否对工作环境造成影响。其中,输电线路是电力系统中的重要部分,起到输送和配电的作用。而输电线上的绝缘子长期暴露在室外环境中,其表面容易布满灰尘等污秽物;在天气干燥时,绝缘子保持较高的绝缘水平,而受到潮湿时,绝缘子表面污秽物中的电解质会溶解和电离,形成一层导电膜,降低了绝缘水平,进一步会产生闪络现象[1-2]。
在面对闪络问题,国内外对绝缘子检测与清理等方面进行了机器人的研究设计[3];为了满足安全性及稳定性方面的要求,在运动学仿真[4]与电磁兼容性能分析[5]等方面也对机器人进行了相关研究。但关于机器人在输电线上作业时,是否使周围的磁场产生变化,导致输电线上的磁场强度高于限值标准等问题的分析相对较少。
因此,针对机器人在输电线路等特殊环境下作业时,可能会影响输电线路上的磁场环境这个问题,需要对机器人进行静磁场分析。进而,基于ANSYS有限元分析软件[6],分析在110 kV输电线的输送功率10~50 MW范围内,绝缘子清洗机器人在绝缘子串上3处位置时的静磁场情况,对比了不同材料的静磁场强度变化,并进一步优化机器人的设计材料,使机器人周围静磁场相对变化量减少。
1机器人总体情况
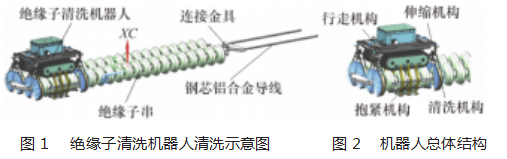
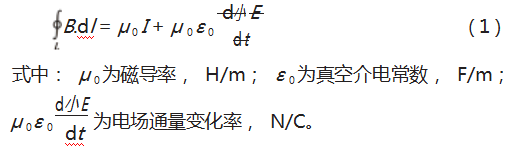
图1所示为绝缘子清洗机器人清洗示意图,主要包括了绝缘子清洗机器人、绝缘子串、连接金具以及钢芯铝合金导线组成。图2所示为机器人总体结构,主要包括了行走机构、抱紧机构、伸缩机构及清洗机构[7-9],行走机构负责机器人向前向后的移动,其机器人前端配备视觉相机,通过机器视觉导引前方路径;而抱紧机构防止机器人在移动过程中发生侧翻,限制了机器人向左向右旋转的自由度,同时具备一定的导向作用;伸缩机构可以使清洁机械手往前往后伸缩一定的距离,从而避免行走机构过多移动;清洗机构上装有扇形喷嘴,可以喷出110°范围内且具有一定压力的雾状水粒,其末端清扫手爪进一步扫去污秽物,从而达到良好的清洁效果。而机器人向前移动的同时,喷嘴会一直喷洒出液体进行清洗,其末端机器手爪是环着绝缘子,相当于机械手随着机器人移动时清扫着绝缘子,通过视觉相机观察到某个绝缘子特别污秽,机器人会停止移动,由伸缩机构带动机械手往前往后移动一段距离及机械手自身张合一定距离,促使机械手上的海绵毛刷与绝缘子摩擦,从而使污秽物掉落,达到清理的目的;机器人离最后一个绝缘子有一定的距离时,机器人会停止移动,由机械手通过伸缩机构实现清理。当机器人往返时,达到设定第一个绝缘子的距离时停止。
2机器人静磁场分析
2.1分析原理
110 kV输电线路上会产生一定的静磁场,当机器人在绝缘子上进行清洗时,其周围的静磁场可能发生改变,其值可能偏高或者偏低。高于输电线路上的直流静磁场时,则不符合磁场的限值标准,因此需要利用有限元软件分析机器人在绝缘子上作业时的静磁场情况[10]。下式为电场产生磁场的原理公式:
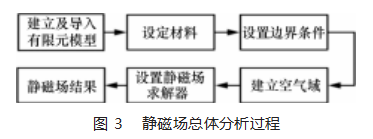
图3所示为静磁场总体分析过程,首先将有限元模型进行简化,再根据实际情况设置材料参数、设置边界条件、建立求解区域及设置静磁场求解环境,最后获得静磁场分析结果[11]。有限元模型由三维模型转换格式所得,但由于三维模型较为复杂,因此需要进行简化再导入有限元软件里;其次,在有限元软件中,需要设置所属物体的材料特性,以便于模拟真实情况;而边界条件指的是电压区域,根据真实情况,将导线设置为带电体;而在求解过程中,为了求解的精度得以提高,建立有限的空气域,即模拟现实中,空气包裹全部物体的区域;最后设置所属分析的求解类型,即静磁场分析,以及静磁场相关特性参数、求解区域磁场分布区域、调整局部网格。
2.2建立参数
采用有限元软件进行静磁场分析,需要建立有限元模型、材料等相应的物理参数。
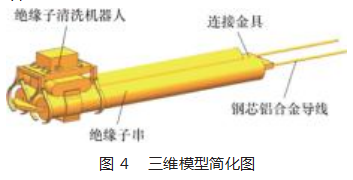
由于所设计的三维模型有许多细节特征且总体形状是复杂的,进而在有限元软件中是求解不出结果,因此需要对三维模型进行简化再进行分析。图4所示为三维模型简图。由于原模型体积相对庞大,分析软件计算量大,因此,图中模型按一定比例进行缩放,去掉胶制品等非金属材料;同时为了更好地划分网格,部分简化后呈规则状态的图形,被视作为一体;再将机器人部分细节特征省略或者将模型的细节特征与机器人总体结构部分融为一体。
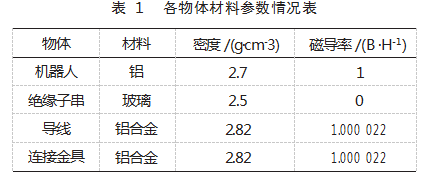
表1所示为各物体的材料情况表,据相关标准可知110 kV输电线的材料为钢芯铝合金[12];以及根据所设计内容可知,机器人为轻量化铝制材料;而绝缘子以绝缘材料为制造材料,例如陶瓷或玻璃,对周围磁场环境影响不大,因此,绝缘子串可看作为真空区。由于内部的电子元件已使用保护罩防护,因此,主要分析机器人表面静磁场情况。
根据额定功率在10~50 MW范围内,分析机器人对输电线路上磁场环境的影响。因此,分别以10 MW、20 MW、30 MW、40 MW、50 MW作为设置变量,即对应W1、W2、W3、W4、W5。
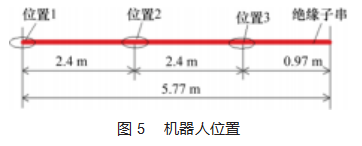
图5所示为机器人位置。位置1为机器人开始动作时的安装位置;位置2为位置1与位置3的中间位置,即移动过程中到达的位置;而位置3为机器人距离最后一个绝缘子的长度位置,即终点位置,由于机器人末端的清洗手爪可以伸缩一定范围,同时机器人装有扇形喷嘴,可以喷出110°范围内且具有一定压力的输电线路专用清洗液颗粒,因此机器人会在距离最后一个绝缘子0.97 m处停止。根据绝缘子串长度为5.77 m,则位置1即开始位置设为0 m,位置2为到达距离第一个位置的长度为2.4 m,位置3为到达距离第一个位置的长度为4.8 m。因此,分别分析机器人在绝缘子串上时所在在位置1、位置2及位置3的3处位置静磁场分布情况及磁感应强度。
2.3分析结果
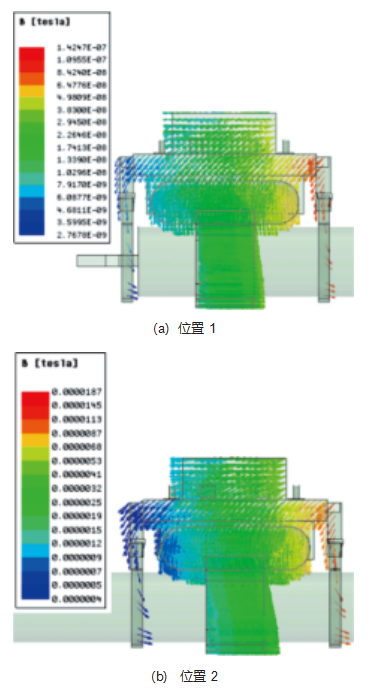
图6所示为静磁场分布图,当W1=10 MW时,图(a)、(b)、(c)分别对应机器人在位置1、位置2、位置3时的静磁场情况,同理,可知W2=20 MW、W3=30 MW、W4=40 MW、W5=50 MW时的情况。图(a)、(b)、(c)中,远离导线一侧的机器人表面磁场强度都较弱,机器人周围磁场强度大小从远离导线一侧到靠近导线一侧逐渐增强;由于绝缘子串与导线相连接,而机器人安装绝缘子串上面,因此,从机器人上部的磁场强度到下部的磁场强度会逐渐增强。总体来说,机器人周围的磁场强度都偏低,没有明显的变化,但越靠近导线一侧,以位置1与位置3作磁场强度的比较,磁场强度有明显的倍数增长。其次,由于清洗机构的底部结构最靠近导线,因此,磁感应强度有明显的变化。
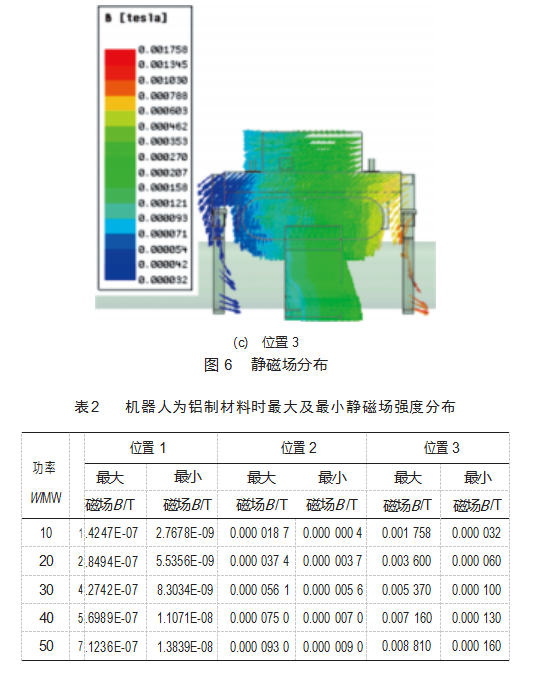
表2所示为不同功率时,机器人分别在3处位置时的最大及最小静磁场强度分布情况。由表可知,功率不同,周围的静磁场强度不同;功率越大,周围的磁场强度越大;离导线越近其周围的磁场强度越大,同时离导线一侧的磁场强度呈较大的倍数增长。将输电线路看作一段载流I,长为L,其磁场强度公式为:
式中:a为场点到载流直导线的垂直距离,m;m0为磁导率,H/m;θ为电流流入端和流出端电流元与矢径之间的夹角,°。
机器人的材料是不变,即磁导率m0恒定,电压与功率大小是确定的,即电压与电流是一定,由于输电线路并非完全为直导线,存在一定的弯曲性,则a与θ会变化,因此磁场强度会存在一定的变化,其次物体在空间移动时的磁场强度随离导体的距离增大而衰减,这两者情况共同作用下,致使离导线一侧的磁场强度呈较大的倍数增长。
从式(2)可知,当电压和功率一定时,即电流也是恒定,机器人采用磁导率更低的材料,可以使机器人周围的磁场强度减小,因此,在机器人表面镀一层铜材料再进行分析,其中铜的密度为8.960 g/cm3,磁导率为0.999 9 B/H。
表3所示为镀铜材料机器人在不同电流时,分别在3处位置时的最大及最小静磁场强度分布情况。由表可知,当换成镀铜材料时,磁场强度最小值比铝制材料还要大一些,其原因是出现微小差异,但不影响总体规律。其周围的磁场强度依旧按照表1的规律,而且当换成磁导率比铝低的材料时,对照各处位置的磁场强度,镀铜材料均比铝材料低;功率越大且越靠近导线时,镀铜机器人比铝制机器人的周围磁场强度有明显的减少。
3结束语
本文采用ANSYS对机器人清洗110 kV输电线路绝缘子串时的静磁场环境进行分析,结果表明,110 kV输电线路在输送功率10~50 MkW时,以绝缘子串中点为圆心,在圆内的磁场强度范围为2.767 8E-09~0.008 810 T。在远离输电线路上的地面,周围磁场强度也会低于2.7678E-09 T且逐渐衰减。根据相关标准,在输电线路附近作业时的磁场限值标准为10 mT[13],即0.01 T,根据上表可知,在110 kV输电线路输送额定功率10~50 MkW范围内,机器人周围静磁场分布均达到标准。通过静磁场分析可知,功率不同,周围的静磁场强度不同;功率越大,周围的磁场强度越大;离导线越近其周围的磁场强度越大,同时离导线一侧的磁场强度呈较大的倍数增长;当功率与电压恒定时,通过采用磁导率较低的材料作为机器人的制作材料,可以减低机器人对输电线路上磁场环境的影响。
参考文献:
[1]周磊.输电线路绝缘子污闪形成原因及预防措施[J].技术与市场,2017,24(10):90-91.
[2]谭晓蒙,邢敬舒,郑建军.基于材料特征分析的复合绝缘子老化评估方法[J].内蒙古电力技术,2020,38(6):101-103.
[3]俸波,黄志都,田树军,等.绝缘子检测机器人攀爬机构研究现状分析[J].广西电力,2021,44(3):29-34.
[4]蔡长亮.基于Pro/E与ADAMS的绝缘子清扫机器人的设计与仿真[J].机械工程与自动化,2022(1):120-122.
[5]王岩,胡聪,党世轩,等.110kV输电线路绝缘子带电清扫机器人电磁兼容性能分析[J].电力学报,2020,35(5):424-431.
[6]马欣.巡检机器人无线充电系统磁场分析与屏蔽技术研究[D].北京:北京交通大学,2019.
[7]曹涛.盘式绝缘子串检测机器人设计与运动学仿真[D].济南:齐鲁工业大学,2015.
[8]芦红利,闫娟.基于RecurDyn的4旋翼摆臂式清洗机器人设计[J].轻工机械,2021,39(4):39-38.
[9]崔勇,伍铜言,刘尧,等.设施农业自走式水肥喷洒小车的设计[J].南方农机,2021,52(15):47-48.
[10]陈庆东,王俊平.基于COMSOL软件的静磁场仿真与分析[J].大学物理实验,2018,31(2):88-91.
[11]许志伟,刘志华,彭晓,等.不对称平衡变压器三维静磁场仿真分析[J].湖南工程学院学报(自然科学版),2018,28(1):10-13.
[12]GB 50545-2010,110kV~750kV架空输电线路设计规范[S].
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/59539.html