SCI论文(www.lunwensci.com)
摘要:以变色龙为研究原型, 制作一个模仿变色龙爬行 、变色的四足机器人 。为解决机器人爬行的问题, 通过 Arduino 控制变色龙 机器人行进, 分析蜥蜴类爬行动物的步态以及结合四足机器人行进的稳定裕度, 规划出一套机器人步态 。基于 SolidWorks 软件建 模, 设计机器人机械结构, 利用 3D 打印将零件打印出来, 再将打印零件组装成变色龙机器人 。为解决机器人的摆尾机械结构问 题, 通过齿轮结构, 构造出傅里叶摆尾, 详细地对机器人摆尾的齿轮运作原理和齿轮运动轨迹的进行数学分析; 在介绍稳定裕度 的同时分析机器人在各种步态情况下稳定裕度 。从电路控制 、结构设计 、数学分析 、步态模拟分析 、样机试验等方面设计出一个 可灵活爬行 、在各方面领域有着广阔应用前景的变色龙机器人。
关键词:变色,四足机器人,多关节,齿轮摆尾,稳定裕度
A Design of a Multi-joint Bionic Chameleon Robot Deng Jun1. Zhong Yaopeng2. Guo Hongzhen1. Li Ruizhen1. Tan Kaiyuan1
( 1. School of Mechanical Engineering, Dongguan Institute of Technology, Dongguan, Guangdong 523000. China;
2. School of Electronic Engineering and Intelligence, Dongguan Institute of Technology, Dongguan, Guangdong 523000. China) Abstract: Taking the chameleon as the research prototype, a quadruped robot that imitated the chameleon´s crawling and changing color was made. In order to solve the problem of robot crawling, the team controlled the chameleon robot through Arduino, analyzed the gait of lizard reptiles and planned a set of robot gait in combination with the stability margin of quadruped robot . Based on SolidWorks software modeling, the mechanical structure of the robot was designed, the parts were printed by 3D printing, and then the printed parts were assembled into a chameleon robot. In order to solve the mechanical structure problem of robot tail swing, Fourier tail swing was constructed through gear structure. A mathematical analysis of the gear operation principle and gear trajectory of robot tail swing were made in detail . While introducing the stability margin, stability margin of the robot under various gait conditions were analyzed . From the aspects of circuit control, structure design, mathematical analysis, gait simulation analysis, prototype test, etc., a chameleon robot that can crawl flexibly and has broad application prospects in various fields has been designed.
Key words: color change; quadruped robot; multi joint; gear swing; stability margin
引言
仿生技术是近些年在工程技术与生物科学发展起来 的学科 。仿生学思想在生物学和技术之间架起了桥梁, 为解决技术问题提供了帮助。通过模仿生物学原理, 人类 不仅找到了技术解决方案, 还完全适应了大自然的需要。
目前仿生技术主要研究方向包括仿生机器人技术 、 智能系统群体通信技术 、仿生感知与信息处理技术 、合 成生物学仿生技术 。仿生机器人在军事 、工业 、农业、 医学等诸多领域被广泛应用 。爬行机器人作为特种机器 人的一种, 可以在环境复杂的条件下进行特定的作业, 受到人们的重视, 为完善该领域技术, 对仿生爬行机器 人的研究已成为机器人技术发展的重要方向[1]。
四足爬行机器人能够在许多崎岖地形爬行, 与其他 类型的爬行机器人相比, 它在行走时有更好的稳定性以及更强大的负载能力, 具有结构简单 、稳定性高等优点, 而四足动物是四足仿生机器人的重要灵感来源 。瑞士 EPFL 机器人专家以火蜥蜴为模型, 设计了一种仿生机器 人 Pleurobot 。瑞士团队通过设计 Pleurobot[2]提供了所有活 动的关节转矩控制, 这使得可以应用神经网络模型的脊 髓神经回路的蝾螈和激活虚拟肌肉模拟记录动物运动以 及现实的粘弹性性质, 了解脊椎动物运动控制原理。
本文作者团队将以仿生机器人 Pleurobot 为原型, 从 机械结构 、 电气控制两个部分设计制作 “变色龙机器 人”。在 SolidWorks 建立机器人机械模型, 最后将实物组 装出来, 验证其能动性。
1 电路控制部分
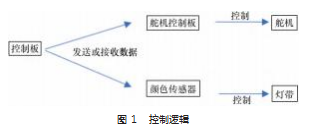
根据实现舵机驱动和变色的两个效果, 控制逻辑如 图 1 所示。
1.1 舵机控制
舵机是一种位置 (角度) 伺服的驱动器, 适用于那 些需要角度不断变化并可以保持的控制系统 。在高档遥 控玩具, 如飞机 、潜艇模型, 遥控机器人中已经得到了 普遍应用 。爬行机器人的运动由各个关节一定幅度的转 动带动, 同时普通的舵机具有扭矩大的特点, 能够支撑 起带动机器人 。因此在设计变色龙机器人时, 每个关节 由舵机及其打印件组成。
变色龙选用的舵机是 20 kg 的直流伺服舵机, 用传统 的 PWM 协议, 对 PWM 信号要求较低, 在接受一次信号 后可以位置自锁, 减少控制板的 CPU 负载[3] 。舵机控制 器读取输出电压, 确定转动角度, 将该角度和目的角度 作对比, 如果有角度偏差就再次输出 PWM 信号重新调 整 。数字舵机是由一定占空比的 PWM 信号来驱动的, 驱动舵机旋转的 PWM 信号一般是周期为 20 ms 左右的脉 冲信号 。舵机的角度是由 PWM 信号的高电平占空比来决 定的, 舵机的转速度取决于 PWM 信号的频率, 频率越 高, 舵机转速越快[4] 。采用市面上的舵机控制板来对变 色龙进行控制。
1.2 颜色传感器模块以及变色模块
变色龙是蜥蜴中的一种, 而跟其他品种的蜥蜴相比较, 最为突出的特征就是其变色能力, 适应环境的生存 能力极强, 通过改变体色来隐藏自己。
自然界中, 变色龙因为其眼睛受外界光线的刺激后, 它的中枢神经能够将光线的刺激传给体内, 变色龙体内 贮存着黄 、绿 、蓝 、紫 、黑等各种不同色素细胞, 一旦 周围的光线 、温度和湿度发生了巨大变化, 变色龙的表 皮组织结构也会随之发生变化 。这时变色龙看到什么颜 色, 身体表面就会变成什么颜色。
选用 Arduino 作为控制主板, 还有 TCS3200 颜色传感 器 以 及 RGB 灯 WS2812 构 成 变 色 龙 的 变 色 系 统 。 Ws2812b 是集控制电路和发光电路于一体的智能外控 LED 光源 。像素点内部包含了智能发展数字接口数据锁 存信号整形放大驱动系统电路, 还包含有高精度的内部 控制振荡器, 有效保证了像素点光的颜色准确度, Ardu ‐ ino 可以通过输出RGB 数值, 控制该模块的颜色状态, 从而实现变色的效果。
通常各种颜色能够根据三基色理论, 将红绿蓝三基色按不同比例混合制成其他各种颜色。
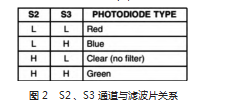
根据上述原理, 只要知道了 3 个颜色各自的颜色数值, 就能得出对应的颜色 。对于 TCS3200 来说, 当选定 一个不同颜色滤波器时, 它只允许特定的原色通过, 阻 止其他原色通过 。例如, 在选择红色滤光片时, 只有红 色才能通过, 蓝色和绿色被阻挡, 从而得到红光的强度; 同理可获得蓝光和绿光的强度 。通过分析这 3 个不同光 强值, 就可以分析出反射到 TCS3200D 传感器上的光的 颜色 。TCS3200D 传感器有 4 个滤光片, 红色 、绿色和蓝 色, 并且是透明的 。滤光片模式可以通过其引脚 S2 和 S3 的高电平和低电平来选择, 如图 2 所示[5]。
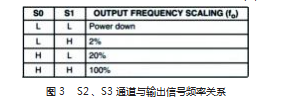
TCS3200D 有可编程的彩色光到电信号进行频率的转 换器, 当被测物体反射光的红 、绿 、蓝三色光线分别到 达 TAOS TCS3200RGB 感应芯片时, 其内置的振荡器会输 出一个方波, 方波信号频率与所感应的光强成比例之间 关系, 光线作用越强, 内置的振荡器产生方波出现频率 越来越高 。TCS3200 传感器具有 OUT 引脚, 其输出信号 的频率也与内置振荡器的频率成比例, 其比率因子可以通 过其引脚 S0 和 S1 的高电平和低电平来选择, 如图 3 所示。
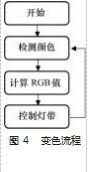
通过白平衡校正来得到 RGB 比例因子 。反射光中红 、绿 、蓝三色光对应的 TCS3200 输出 信号 1 s 内脉冲数分别乘以 R 、G 、B 比 例因子, 就可换算出了被测物体的 RGB 标准值了 。因此能够通过 TCS3200 传感 器传入数据到控制板计算出传感器的 RGB 数值, 再由控制板输出该数值到 WS2818B 上, 实现检测到什么颜色就 转变成什么颜色, 如图 4 所示。
2 变色龙机器人结构设计
2.1 尾部结构
本节首先要解决的就是生物行为特征模仿及其结构 设计的问题, 因变色龙与蜥蜴同属一个亚目, 以蜥蜴作 为参考方向。
与变色龙的尾部不同, 大多数蜥蜴拥有圆长且末端 尖细的尾部, 能作屈曲运动, 吸引敌害的注意力, 变色 龙的尾巴相比于大部分蜥蜴, 更加灵活且功能性强, 经 常呈现蜷曲的状态, 能够保持身体平衡, 帮助其缠绕树枝, 在树枝上爬行。
2.1.1 齿轮设计
结构设计上, 假如尾部既需要协调脊椎和四足的摆动, 又要满足变色龙尾部蜷曲的特征, 光靠二维方向上 运动的电机来说, 无疑是一个难点, 为了实现结构的分 部设计, 采用能够协调脊椎和四肢运动的尾部齿轮结构, 而暂时不考虑变色龙尾部蜷曲的特性, 待水平方向摆动 结构设计完成以后, 再加以改进, 添加变色龙尾部蜷曲 的特征结构, 因此目前先讨论水平方向的摆动结构。
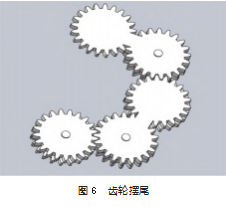
为了尾部长度大小适宜, 用 3D 打印技术获得了一 系列的齿轮零件, 齿轮采用模数为 2. 齿数 14 的齿轮, 另一部分配合的零件同样是该尺寸的齿轮, 只不过这 些零件是由两个相同大小的齿轮拼在一起, 具体如图 5 所示 。
该部件的特点是, 两个齿轮圆心距刚好为齿轮半径 的 2倍, 尾部只用到一个单齿轮零件作为原动件, 由电 机带动齿轮的转动, 其余都是双齿轮零部件, 作为尾部 的从动件, 齿轮装配如图 6所示 。特点: 上下每个齿轮 时刻都保持同轴心, 且上下层的齿轮与齿轮之间的圆心 距始终保持不变, 为齿轮半径的两倍, 电机带动单齿轮 零件转动的同时, 后面的齿轮也随之转动, 且单齿轮零 件与双齿轮零件转动方向相反, 双齿轮零件之间的转动方向相同, 从整体上来看, 能够产生摆动的效果 。只要 控制电机转动的方向和时间, 就能实现左右来回摆动。
2.1.2 齿轮圆心分析
先讨论该结构向一侧摆动的情况, 假设原动件转动 角速度为 W, 半径为 R, 线速度为 V, 线位移为 S, 转动 角度 θ, 转动时间 t→0. 装配图有 5个齿轮零部件, 以转 动齿轮轴心为原点建立平面坐标系, 初始时刻呈直线位 于坐标系 X 轴上, 计算 5个齿轮轴心向一侧摆动不同时 刻的坐标位置。
W1上R=W2上R 轴心 O2. O3 相对 X 轴角位移 α23=W2上 ⋅ t =W1上 ⋅ t, O1 ( 0.0)、O2 ( 2R,0)、O3 ( 2R( 1+cosα ), 2Rsinα )
由齿轮 1 ∶ 1线性传动关系公式:
α23 ⋅R=W3下 ⋅R ⋅ t ( 1)
可知 W1上=W3下, 因此可以推出该机械结构, 每一个 齿轮的角速度和线速度相同, On On-1 与 On-1On-2 的夹角, 即相对转角 β 相同, 且 α23=W1上 ·t=α=β, α34=2β, αnn+1= ( n-1) β, X4=2R( 1+cosβ+cos2β), Y4=2R(sinβ+sin2β)。
第 4 个轴心坐标: O4 ( 2R( 1+cosβ+cos2β), 2R(sinβ+ sin2β))。
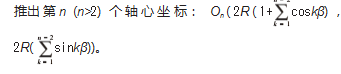
根据前 4个圆心 O 坐标: O1 ( 0. 0)、 O2 ( 2R, 0)、 O3 ( 2R( 1+cosβ),2Rsinβ) 、O4 ( 2R( 1+cosβ+cos2β) , 可以推出 第 n (n>2) 个 轴 心 坐 标:
同时根据尾部齿轮结构特性, 要想实现摆尾功能, 至少需要 3个零件, 也就是说, 齿轮轴心坐标至少有 3个以上 。为了更加直观地了 解 结 构 的 几 何 关 系,证明上述坐标计算的正确性, 以原动件轴心 O1为圆心, 建立 X、Y 坐标系 。如图 7所示。
根据上面的计算, 设 Φ1=α23 、Φ5=α34 、Φ 1=W1上 ⋅t =β, 根据几何关系可得 Φ1=Φ2=Φ3=β, 由于每个齿轮角速度 相等, 故 Φ4=Φ 1= β 、Φ5=α34=2β, 由此可以算出第 n 个轴 心的坐标 On。
2.1.3 圆心 n 与傅里叶公式
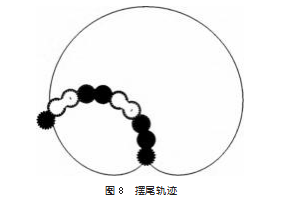
按照尾部结构来回摆动的运动过程, 将最后一个 齿轮距离坐标原点最远距离处的轴心点在 X, Y 坐标系 上描出, 作出了尾巴摆动的运动轨迹点画线, 如图 8 所示 。
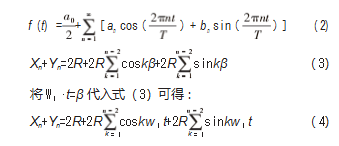
通过观察轴心坐标 On 的一般式, 很容易发现, 其 Xn+Yn 形式与傅里叶级数方程十分相似, 对于实值函数, 函数的傅里叶级数可以写成:
式 ( 2) 与 式 ( 3) 比 较 a0=4R, an 、bn 恒 等 于 2R, W1=2π/T
当轴心坐标数 n→ ∞, n-2→ ∞时, 式 ( 4) 为傅里叶 级数形式。
2.2 脊椎设计思路
脊椎是爬行类动物是十分重要的身体结构, 尤其是对蜥蜴来说, 能够支撑身体, 完成各种复杂的生命活动, 同时, 脊椎与四肢的协调运动, 有助于蜥蜴快速移动, 提高自身存活率 。变色龙也不例外, 很多身体结构都有 相似之处 。在仿生机器人设计中, 四足机器人的四足与 脊椎的运动协调, 步态设计都很关键, 能够解决这两个 问题, 仿生项目就算完成了一半, 这里涉及到机械结构 设计和电机步态程序设计两个难点 。脊椎的设计对步态 稳定裕度有相当大的影响。
通过观察爬行类动物的行为特征, 不难发现, 像蜥 蜴在爬行的过程中, 脊椎始终处于 S 型曲线摆动的状态, 通过来回摆动, 协调四肢的运动, 并且摆动只局限于水 平方向, 这使得结构设计能够简单化, 也想到了用舵机 相继连接的方法实现脊椎的曲线摆动 。对于舵机的要求, 选择动力参数为 20 kg 的直流伺服舵机, 该舵机质量轻 巧, 且该动力能够支撑, 并在设计脊椎底盘时, 采用加 厚和牢固的三角结构达到脊椎支撑的目的 。然后就是考 虑如何使身体部分外表更加美观, 摆动时各个脊椎关节 不会发生相互挤压, 剩下的在实物调试中进行检测 。图 9所示为团队设计的脊椎骨架。
3 步态及其模拟
四足机器人在爬行过程中, 腿部结构遵循一定的规 律进行运动, 每个舵机都具有一定的运动规律, 通过腿部在时间与空间的协调过程实现了机器人语气的步行运 动, 这就是四足机器人的步态 。步态是四足机器人各 条腿相互配合, 协调运动的方式, 是机器人运动的研 究基础[6]。
3.1 蜥蜴行进过程
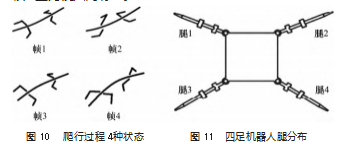
首先, 通过蜥蜴运动的俯视图分析, 得知蜥蜴运动 大致可分为 4种状态, 图 10所示为行进过程简图 。帧 1: 躯干微微左弯, 为右前肢与左后肢的前摆做准备 。帧 2: 躯干左弯, 右前肢与左后肢向前摆动, 左前肢与右后肢 向后蹬地 。帧 3: 躯干微微右弯, 为左前肢与右后肢的 前摆做准备, 与帧 1互为镜面对称 。帧 4: 躯干右弯, 右 前肢与左后肢向前摆动, 左前肢与右后肢向后蹬地, 与 帧 2互为镜面对称[7]。
3.2 机器人步态
四足机器人步态可分为静态步态和动态步态 。静态 步态指每一时刻机器人至少有 3 条以上支撑腿 (立于地 面的腿) 的行走步态 。动态步态指每一时刻有少于 3 条 支撑腿的行走步态 。静态步态稳定性较高, 控制较为简 单, 但是移动速度较慢 。动态步态稳定性较差, 控制复 杂, 但移动较快[8]。
McGhee 和 Frank[9]在 1968 年研究了静态步态中四足 机器人的步态顺序, 指出四足机器人在第一条迈腿确定 的情况下, 一共有 6个可行的迈腿序列。
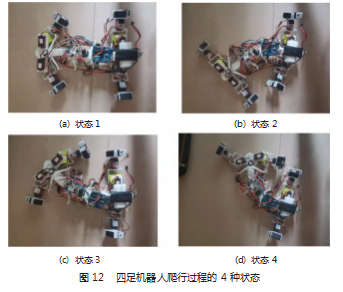
如果先迈 4 号腿, 则迈腿序列 4-1-2-3、4-1-3-2、 4-2-1-3、 4-2-3-1、 4-3-1-2、 4-3-2-1. McGhee 和 Frank对比了四足机器人上述 6种迈腿序列的稳定性, 发 现采用 4-2-3-1 这种迈腿序列时机器人能达到最大稳 定性 。结合 3. 1 节蜥蜴运动仰视图分析和上述迈腿序列, 在 程序编写上控制舵机, 模拟出了变色龙机器人行走步态, 如图 12 所示。
3.3 稳定裕度
四足机器人行走时, 经常会有腿悬空, 造成机器人 失去重心的情况 。对于分析四足机器人稳定性有很多种 方 法, 其 中, 最 常 用 的 是 稳 定 裕 度 方 法[10] 。 1985 年 Messuri[11]提出能量稳定裕度, 他的定义是为将机器人绕 着支撑多边形的某条边界线翻倒所需要的最小能量,
公式为:
ESM=min (mghi ) ( 5 )
式中: i 为支撑多边形的编号; hi 为绕着对应支撑多边形 翻转时机器人质心的高度变化量 。犹豫考虑了质心在 空间上的位置变化情况和机器人所能应对的外界干扰 能量 。
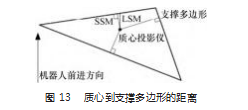
Hirose[12]将能量稳定裕度与机器人自身重力的比值 定义为正则化的能量稳定裕度 (Normalized Energy Stabil‐ ity Margin, NESM ), 即:
NESM=ESM/mg ( 6 ) 由 式 ( 6 ) 可 得 正 规 化 的 能 量 稳 定 裕 度 最 小 值 ( NESM) 为质点到支撑多边形的最短距离。如图 13 所示。
钱玉恒等[7]证明, 可得结论可得纵向稳定裕度的增 量部分随躯干扭动角度的增大而单调增加 。因此灵巧扭 动躯干能够提升四足机器人的稳定性裕度, 也说明为什 么蜥蜴等四足动物为何经常扭动躯干。
4 结束语
本文较为详细地介绍了变色龙机器人结构设计 、电 路控制等内容, 分析了齿轮摆尾在坐标系中的数学式, 讨论了式子与傅里叶函数的数学关系, 解决了机器人如 何在爬行过程根据环境变色, 以及讨论了变色龙静止步 态下它的稳定裕度和按照什么顺序迈腿行走最稳定 。最 终通过对机器人实际运行流畅, 证明了该变色龙机器人 的正常运行, 爬行稳定和摆尾结构能够在四足爬行机器 人身上得到应用 。最后针对变色龙机器人在各个领域的 运用, 比如生态领域等运用, 可以继续开展变色龙机器 人在如何作为检测设备方面的研究。
参考文献:
[1] 黄博 . 四足机器人行走步态及 CPG 控制研究[D]. 哈尔滨:哈尔 滨工业大学,2007.
[2] Karakasiliotis K,Thandiackal R, Melo K,et al.From cineradiogra ‐ phy to biorobots: an approach for designing robots to emulate and study animal locomotion[J]. Journal of the Royal Society, Inter‐ face,2016. 13(119):20151089-2.
[3] 刘群铭,王勇, 史颖刚 . 基于 STM32 的舵机控制器电路设计[J]. 江苏科技信息,2019.36(21):59-62.
[4] 蔡睿妍 . 基于 Arduino 的舵机控制系统设计[J]. 电脑知识与技 术,2012.8(15):3719-3721.
[5] 史洋洋,徐畅, 陈熙,等 . 基于 TCS3200 传感器的结构及数据分 析[J]. 科学技术创新,2017(22):52-53.
[6] 王清峰 . 一种设计用于模拟和研究动物运动的机器人的方法 [D]. 天津:天津大学,2017.
[7] 钱玉恒,王佳伟 . 基于探索者平台的多足仿生机器人实验研究 [J]. 实验室科学,2018(5):27-30.
[8] 张春松 . 灵巧扭动躯干四足机器人运动[D]. 天津:天津大学 ,2019.
[9] McGhee R B, Frank A A. Optimum quadrupedcreeding gaits[M]. Los Angeles:University of California, 1968.
[10] De Gaston R R E, Safonov M G. Exact calculation of the multi ‐ loop stability margin [J]. IEEE Transactions on Automatic Con ‐ trol, 1988.33(2):156- 171.
[11] Messuri, D, Klein, et al. Automatic body regulation for maintain ‐ ing stability of a legged vehicle during rough-terrain locomotion [J].Robotics & Automation IEEE Journal, 1985.
[12] Hirose S, Tsukagoshi, H, et al. Normalized energy stability mar ‐ gin : Generalized stability criterion for walking vehicles [C]// Proceedings of the IEEE International Conference on Robotics and Automation, Seoul: IEEE ,2001.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/59232.html