SCI论文(www.lunwensci.com)
摘要:为改善井中微地震测井仪推靠装置结构复杂难以满足小井眼测井, 或在小井眼测井中运动可靠性低 、推靠耦合不稳定的问 题, 研制一种外径 60mm, 适用于 127~ 165. 1 mm 井径的微地震测井仪推靠装置 。依据推靠装置工作原理应用闭环矢量法建立推靠 机构数学模型, 利用数值分析推靠机构运动特性, 研究各构件的位移 、速度及加速度, 通过 Adams 仿真软件分析推靠机构运动 规律, 与数值计算进行对比验证数学模型合理性 。结果表明: 推靠臂完全打开时间为 15 s, 在最小适用井径 127 mm 时推靠力为 390 N, 最大适用井径 165. 1 mm 时推靠力为342 N, 样机试验表明, 推靠力试验值与理论值相差 2. 1%, 最小推靠力达到仪器自重 3 倍以上, 能实现井中停靠并与井壁良好耦合, 验证了推靠装置的运动合理性和可靠性, 为后续推靠机构优化提供理论参考。
关键词:小井眼;,推靠装置, 运动学分析, Adams 仿真, 样机试验
Analysis and Experimental Study on Motion Characteristics of Eccentering Device of Slimhole Microseismic Logging Tool
Zhang Jianwei1. Wu Wei1. Zhang Jin2. Wang Jinchao1. Bai Baoxin1 ( 1. School of Mechanical Engineering, Xi ´an Shiyou University, Xi ´an 710065. China;
2. Xi ´an Ital Technology Development Co., Ltd., Xi ´an 710065. China)
Abstract: In order to improve the complex structure of micro-seismic logging eccentering device , which is difficult to meet the requirements of thin hole logging, or the low movement reliability and unstable sidewall contact coupling in thin hole logging , a micro-seismic logging eccentering device with an outer diameter of 60 mm was developed, which was suitable for 127~ 165. 1 mm well diameter. According to the working principle of the push mechanism, the closed-loop vector method was applied to establish the mathematical model of the eccentering mechanism. The motion characteristics of the eccentering mechanism were analyzed numerically , and the position, velocity and acceleration equations of each component were studied. The motion law of the eccentering mechanism was analyzed by Adams simulation software , and the rationality of the mathematical model was verified by comparing with the numerical calculation . The results show that the full opening time of the eccentering arm is 15 s, the eccentric force is 390 N when the minimum applicable well diameter is 127 mm, and the eccentric force is 342 N when the maximum applicable well diameter is 165. 1 mm. The prototype test shows that the experimental value of eccentric force is 2. 1% different from the theoretical value, and the minimum eccentric force is more than 3 times the weight of the instrument, which can realize the docking in the well and good coupling with the borehole wall. The rationality and reliability of the eccentering device are verified, which provides a theoretical reference for the subsequent optimization of the eccentering mechanism .
Key words: slimhole; eccentering device; kinematic analysis; Adams simulation; prototype test
引言
随着我国油气勘探不断向深层探索, 勘探难度显著 提升, 所面临的是更小的井眼以及更加恶劣的未知环境, 从而对测井仪器的结构和可靠性提出了更高的要求[1-2]。 推靠装置作为井中微地震测井过程中的关键装置之一, 其能在井下运动打开推靠臂与井壁耦合并产生一定推靠 力使检波器在井中停靠, 从而实现井中贴壁探测, 一个 运动可靠, 耦合稳定的推靠装置能有效保证测井工作的 顺利进行[3]。
目前对于小井眼测井的井中微地震测井仪推靠装置研究较少 。石丽云等[4]为降低测井成本, 提高测井效率, 设计了一种适应井径 150~550 mm 的多臂机械推靠器, 其 中每个推靠臂互不干涉, 独立运动, 一次下井能同时测 量井径 、地层电阻率与岩石孔隙度 3 个参数, 提高了测 井效率 。赵斌等[5]通过研究不同长度推靠臂下推靠力随 转角的变化, 建立了钻井中途油气层测试器推靠装置数 学模型, 根据测量井径的不同选择合适长度的推靠臂, 改善了仪器测井过程中推靠性能利用不充分的问题 。邢 家乐等[6]设计了一种新型 VSP 仪器推靠装置, 在原纯机 械式推靠机构的基础上新增了液压推靠系统, 推靠力大,并相比于纯液压式大大降低了成本, 但结构复杂 、拆装 繁琐 。王会来等[7]设计了一种适合测量 250~400 mm 井径 范围的三臂测井仪推靠装置, 该推靠装置采用电机推靠, 丝杠传递力矩, 构件简单, 运动稳定 。任涛等[8]应用矩 阵解析法建立了微球聚焦测井仪推靠机构数理模型, 研 究了各杆件在测井过程中的运动状态, 揭示了推靠装置 的运动特性。
本文针对目前常规微地震测井仪推靠装置不适合小 井眼测井问题, 研制了一种结构简单 、运动可靠 、耦合 稳定的小井眼微地震测井仪推靠装置 。通过理论分析和 仿真模拟重点研究了推靠机构的运动特性, 并通过样机 试验验证了推靠装置的可行性 。改善了目前常规推靠装 置在微地震测井过程中结构复杂不适合小井眼 、推靠耦 合不稳定的情况。
1 推靠装置结构原理与主要参数
1.1 整体结构及工作原理
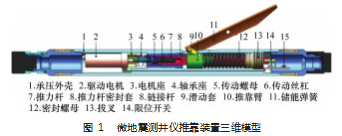
所设计的推靠装置三维模型如图 1 所示, 主要由承 压外壳 、驱动电机 、丝杠螺母 、推力杆 、滑动套 、链接 杆 、推靠臂 、储能弹簧 、拔叉 、限位开关等组成, 推靠 臂通过连接销与外壳和链接杆铰接, 不受内部构件约束, 结构简单, 拆卸方便, 外形为半圆弧形, 闭合时能最大 程度地与壳体耦合, 一方面缩小了仪器体积, 另一方面 与井壁接触时能与套管更好耦合 。承压壳体材料采用 TC11. 耐高温 、抗腐蚀 、密度小, 可以很好地保护内部 器件和减小仪器重量 。推靠臂采用机械性能非常完善的 高强度材料 0Cr17Ni4Cu4Nb 来保证推靠装置的可靠性和 使用寿命。
该装置采用单臂推靠, 以直流减速电机为驱动方式, 通过丝杠螺母将电机的旋转运动转化为推杆的轴向平移 运动并向推靠机构传递动力释放储能弹簧, 弹簧力推动 滑动套左移并经由链接杆将力传递给推靠臂, 使推靠臂 绕固定点转动, 直至井壁停止, 此时推力杆继续左移, 直至拔叉触碰左限位开关使电机停转, 完成井中推靠过 程 。反之, 电机反转, 推力杆右移, 压缩储能弹簧, 实 现推靠臂收回 。整个过程中弹簧力通过对滑动套施加作 用力经由链接杆 、推靠臂形成推靠力, 作用于井壁, 实 现井中停靠 。其中电机主要用来释放和压缩储能弹簧, 实现推靠臂的开启和闭合 。推力杆密封套和密封螺母主要用来保证推力杆俩端密封和导向, 实现推力杆两端压 力平衡, 保证井下推靠动作。
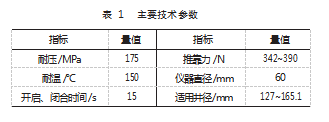
1.2 主要技术参数
微地震测井仪推靠装置主要技术参数如表 1 所示。
2 运动特性分析
2.1 建立推靠机构位置矢量方程
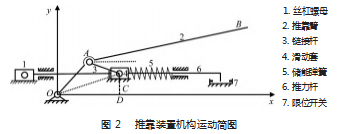
为掌握推靠装置打开过程中各构件运动特性, 研究 各构件位移 、速度 、加速度随时间运动规律, 对推靠机 构进行运动分析[9- 10] 。根据前述推靠装置运动机理建立 如图 2 所示的微地震测井仪推靠装置机构简图[11] 。取推 靠臂固定铰接点 O 为坐标原点建立直角坐标系, 利用闭 环矢量法对推靠机构进行运动学分析, 将各杆件表示为 杆矢, 建立机构闭环矢量方程。
为便于研究, 将丝杠螺母机构简化为滑块 1. 取滑 动套 4 为原动件 。连接 CD, 由闭环多边形 OACD 可建立
如下闭环矢量方程:
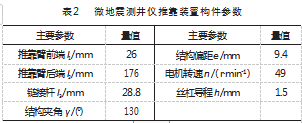
式中: l1 为推靠臂前端 OA 长度, mm; l3 为链接杆 AC 长 度, mm; e 为偏距 CD 长度, mm; s 为滑动套 4距原点 O 处 OD 长度, mm; xc-0 为滑动套 4 初始位置; vc 为滑动套 4 速度, mm/s; t为运动时间/s; n 为电机转速; h为丝杠导程。
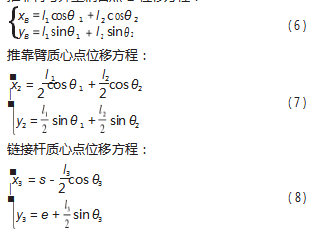
2.2 推靠机构位移分析
将矢量方程 ( 1 ) 向 x, y 轴投影得到如下位移方程组:
式中: θ 1 为推靠臂前端 OA 与 x 轴正方向夹角; θ 3 为链接 杆AC 与 x 轴负方向夹角。
为便于求解, 借助几何关系连接 OC 可得:
式中: θ 2 为推靠臂后端 AB 与 x 正方向夹角; γ 为推靠臂 结构夹角 OAB。
根据上述所得方程可求得各点位移方程如下。
推靠臂与井壁耦合点 B 位移方程:
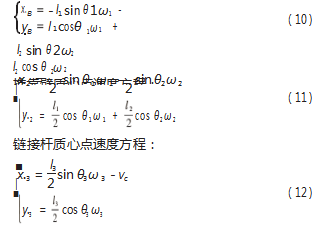
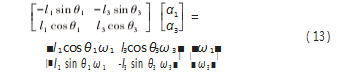
2.3 推靠机构速度分析
对式 ( 3 ) 求一阶导可得如下速度方程组, 用矩阵可 表示为:式中: ω 1 为推靠臂前端 OA 转动角速度; ω 3 为链接杆 AC 转动角速度。进而求得各点速度方程如下 。 推靠臂与井壁耦合点 B 速度方程
2.4 推靠机构加速度分析
对式 ( 3 ) 求二阶导可得机构加速度方程组如下
式中: α 1 为推靠臂前端 OA 转动角加速度; α 3 为链接杆 AC 转动角加速度。
进而求得各点加速度方程如下。
推靠臂与井壁耦合点 B 加速度方程:
3 推靠装置理论计算求解
微地震测井仪推靠装置构件参数如表 2 所示
3.1 运动特性理论求解
在理论分析基础上, 利用Matlab 数值分析对理论模型 进行求解, 确定推靠机构运动过程中各构件运动规律[12]。
图 3~5 为推靠臂和链接杆在推靠装置打开过程中的 角位移 、角速度和角加速度运动变化曲线, 从图 3~5 可 以看出在推靠装置打开过程中, 链接杆角位移 θ3 不断增 大, 推靠臂随着链接杆的运动角 θ1 也不断增大, 两者角 速度和角加速度运动轨迹平缓。
图 6为推靠臂与井壁耦合点 B 在 x 方向和 y 方向随时 间运动的位移曲线, 从图中可以看出 B点运动到最大位 置即推靠臂完全打开时间为 15 s。
3.2 推靠机构打开过程中推靠力分析
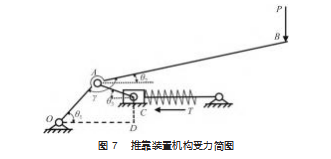
推靠力大小是评判推靠装置耦合性能的重要参数, 一 个稳定可靠的推靠力对测井工作至关重要[13- 14]。为分析推 靠机构打开过程中推靠力的稳定性和可靠性, 建立推靠力 与各构件运动参数的数学关系, 研究推靠臂在打开过程中推 靠力随井径变化规律。推靠装置机构受力简图如图7所示。
根据杆件受力情况与几何关系可列出井壁反推力P(即推靠力) 与弹簧力 T绕 O点的转矩方程:
弹簧刚度 k 约为 6.2 kg/mm, 在安装时弹簧预压 26 mm, 推靠装置运动行程 18 mm, 总变形量为 44 mm, 则 产生的储存形变能 (即初始弹簧力) 为 T1=2 728 N, 则 弹簧力 T = T1 - kvC t。
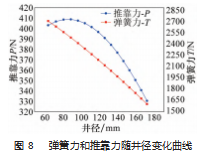
根据推靠机构角位移与已知参数, 利用 Matlab 数值 分析可求得推靠装置打开过程中弹簧力和推靠力大小随 井径大小变化曲线, 如图 8 所示。
通过分析可以看出弹簧力随着推靠臂的打开线性减小, 在适应井径 127~ 165. 1 mm 范围内, 推靠力为 342~ 390 N 。根据文献[7], 若要推靠装置在井中稳定停靠 , 产生的推靠力应为仪器自重的 3 倍以上 。此推靠装置质 量为 6.5 kg, 测井检波器质量为 4.5 kg, 总质量为 11 kg, 可以得出推靠力满足使用要求 。但最大推靠力在 90 mm 处为 405 N 左右, 并未得到有效利用。
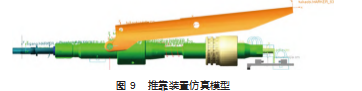
4 推靠装置运动特性仿真分析
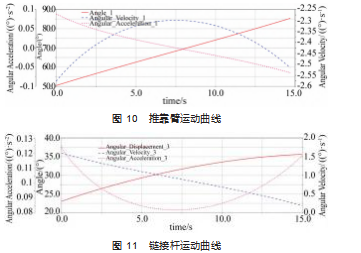
将建立的推靠装置三维模型导入 Adams, 调整坐标 系与理论模型一致[15], 对各构件添加对应的材料属性与 约束关系, 并为丝杠螺母添加螺旋副 。建立如图 9 所示 的运动学仿真模型, 进行推靠装置运动仿真分析。推靠臂和链接杆角位移 、角速度 、角加速度曲线如 图 10~ 11 所示。
从图 10 可以看出推靠臂打开过程中推靠臂角位移 θ1 不断增大, 15 s 内从 50°左右增加到 85°左右, 角速度随 着推靠臂的打开先逐渐减小后逐渐增大, 整个过程无明 显波动。
从图 11 可以看出滑动套匀速向左运动时, 由于链接 杆夹角 θ3 平缓增大, 其水平方向上的分力逐渐减小, 从 而角速度逐渐减小。
打开过程中链接杆和推靠臂角位移线性度好, 符合 推靠臂位移需要快速变化的实际要求, 角速度和角加速 度运动曲线平滑, 与理论计算基本一致无较大波动, 验 证了设计结构和理论分析的合理性。
5 样机试验研究
为验证本装置的合理性及可靠性, 对推靠装置试验 样机进行了推靠力验证试验, 用以验证理论计算的合理性和推靠力大小是否满足工作要求, 使检波器与井壁良 好耦合并完成井中停靠。
5.1 试验方案
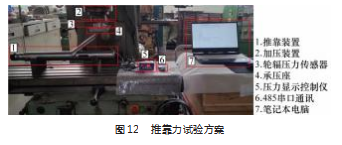
推靠装置推靠力试验方案如图 12 所示, 通过对打开 状态下推靠装置施加井壁约束反力间接获取推靠力 。加 压装置对推靠臂匀速加压, 通过轮辐压力传感器 、承压 座作用于推靠臂, 推靠臂向下匀速运动, 从而压缩储能 弹簧产生反作用力即推靠力 。通过压力传感器实时采集 压力变化, 压力显示控制仪显示具体量值, 通过 485 串 口通讯将数据实时传输到笔记本电脑并记录数据, 得到 推靠力与井径之间的动态关系。
5.2 试验结果
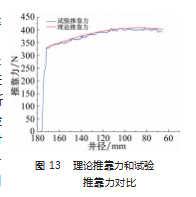
将电脑记录的推靠臂位移时间和轮辐压力传感器压力变化进行处理, 并与理论推靠力进行对比, 得到如图 13 所示的理论推靠力和试验推靠力对比图 。开始时刻试验推靠力迅速上升部分为加压装置接触到推靠臂但还未产生压缩变形时刻 。 由图可以看出试验推 靠力与理论推靠力基本一致, 符合使用要求 。整个过程 准确反映了推靠力随井径的变化趋势, 量化了推靠力大 小, 验证了理论计算的合理性。
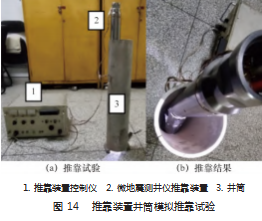
如图 14 (a) 所示, 将推靠装置放置在井筒中, 通 过推靠装置控制仪控制推靠臂打开, 通过图 14 (b) 可以 看出推靠装置在井筒中能完成推靠任务并实现井中停靠。
6 结束语
研制了一种适用于 127~ 165. 1 mm 井径的微地震测井 仪推靠装置, 解释了推靠装置的工作原理并对其进行了 运动学理论分析和仿真模拟分析, 对比分析验证了设计 结构和理论分析的合理性并得到如下结论。
( 1 ) 基于运动学分析, 推靠装置能在 15 s 内快速完 成推靠臂完全打开, 且整个过程位移 、速度 、加速度运 动轨迹平稳, 无明显波动, 表明推靠机构运动性能优越, 能较好地完成推靠动作, 验证了推靠机构的运动稳定性 和可靠性, 并为后续求得各构件的惯性力 、研究各运动 副所受支反力和平衡力矩提供参考。
( 2 ) 建立推靠力与各构件运动参数之间的数学关系, 计算得到在适用井径内最小推靠力为 342 N, 符合使用 要求, 并为后续优化推靠力 、研究最大推靠力与各杆长 和结构角之间的关系提供理论参考。
( 3 ) 通过样机试验表明推靠力试验值与理论值平均 相差 2. 1%, 验证了理论计算的合理性, 说明推靠装置产 生了预期的推靠力能与井壁良好耦合, 完成井中停靠。
参考文献:
[1] 杨元元,孙志慧, 张绪成,等 . 井中三分量光纤激光检波器的研 制及性能测试[J]. 石油物探,2022.61(1):93-99.
[2] 李怀良,庹先国,刘勇,等 . 一种数字三分量地震微测井仪器设 计[J]. 地球物理学报,2017.60(11):4241-4252.
[3] 李明印, 窦修荣,艾维平,等 . 随钻 VSP 井下推靠系统结构研究 与设计[J]. 石油机械,2018.46(2):29-34.
[4] 石丽云,王丽蓉,柳志翔,等 .MSA6240 机械推靠器的设计[J]. 石 油仪器,2008(4):10- 12.
[5] 赵斌 , 冯永仁 . 钻井中途油气层测试器推靠机构的优化设计 [J]. 石油机械,2010.38(12):56-59.
[6] 邢家乐,刘立 . 新型 VSP 仪器推靠装置结构设计[J]. 煤矿机械, 2009.30(4):17- 18.
[7] 王会来,杨建玺,崔凤奎,等 . 新型测井仪推靠装置的设计和分 析[J]. 西安科技大学学报,2009.29(2):209-213.
[8] 任涛,冯斌,孙文,等 . 测井仪推靠系统机构动力特性分析与研 究[J]. 西南石油大学学报(自然科学版),2019.41(5):169- 180.
[9] 马文霄, 葛云,沈从举,等 . 液压升降式打穴机构设计及运动学 分析[J]. 甘肃农业大学学报,2020.55(5):227-234.
[10] Wampler, C W. Solving the Kinematics of Planar Mechanisms [J]. Mech. Des. Sep 1999. 121(3): 387-391.
[11] Liu X, Guo T, Zhang J, et al. Kinetostatic Analysis for Four-Bar Linkage Mechanism of Prosthetic Knee Joint[J]. Journal of Me ‐ chanics in Medicine and Biology, 2019. 19(4): 1- 12.
[12] 任涛,冯斌,孙文,张春琳 . 微球聚焦测井仪推靠系统运动学分 析及仿真[J]. 机械设计与制造,2020(10):204-209.
[13] 王昆鹏, 肖晓华,朱海燕,等 . 柔性牵引器刚柔耦合动力学特征 及结构优化[J]. 中国机械工程,2020.31(8):915-923.
[14] 冯展霞,常宗瑜,邓超,等 . 基于全域与局域模式下波浪驱动推 进机构动力学分析[J]. 机械工程学报,2022.58(13):129- 136.
[15] 卢宁,韩崇瑞 . 基于 ADAMS 刚柔耦合模型的塔式起重机起重 臂疲劳寿命分析[J]. 机电工程,2021.38(8):1003- 1009.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/59005.html