



SCI论文(www.lunwensci.com)
摘要:为了预测碰撞事故的发生和降低碰撞事故发生的概率,提出了一种基于北斗定位的车辆防碰撞预警算法。在每辆车上安装一个亚米级的北斗定位模块和无线通信模块,将监测到的自车位置坐标和周边相邻车辆的位置坐标,分解成水平和竖直两个方向,分别用卡尔曼滤波预测算法对下一时刻车辆的速度、加速度和行驶状态进行预判断,快速选出一定发生碰撞和一定不发生碰撞的情况。若不能立即判断,则分别计算出X和Y方向加速度可变情况下的安全距离,建立并求解碰撞预测状态模型,算出X和Y两个方向同时达到安全距离的碰撞时间最小值,若此最小值比设定的阀值小,则执行报警操作。通过北斗定位模块确定车辆位置坐标,利用卡尔曼滤波算法对车辆行驶情况进行预判断并建立防碰撞预测模型,最后运用MATLAB软件进行仿真。结果表明此算法与传统的利用雷达测距的防碰撞算法相比,具有预警准确性高、可靠性高的特点,更加适应驾驶环境。
关键词:北斗定位技术;卡尔曼滤波预测;MATLAB仿真
Research on Vehicle Anti-collision Warning Algorithm Based on Beidou Positioning
Chen Liping,Yang Jie,Qin Qianqian,Zhu Wenchao
(College of Mechanical Engineering and Transportation,Southwest Forestry University,Kunming 650224,China)
Abstract:In order to predict the occurrence of collision accidents and reduce the probability of collision accidents,a vehicle anti-collision early warning algorithm based on Beidou positioning was proposed.A sub-meter-level Beidou positioning module and wireless communication module were installed on each vehicle.The position coordinates of the monitored self-owned vehicle and the position coordinates of the neighboring vehicles were decomposed into horizontal and vertical directions.The speed,acceleration and driving status of the vehicle at the next moment were predicted by the Kalman filter prediction algorithm,and the collision and non-collision situations were quickly selected.If it could not judg immediately,the safety distance under the condition of variable acceleration in X and Y directions was calculated separately,the collision prediction state model was established and solved,and the minimum value of collision time when the safety distance was reached in X and Y directions simultaneously was calculated.If the minimum value was smaller than the set threshold value,the alarm operation would be executed.The position coordinates of the vehicle were determined by the Beidou positioning module,and the Kalman filtering algorithm was used to pre-judge the vehicle driving conditions and establish the anti-collision prediction model.Finally,the MATLAB software was used for simulation.The results show that compared with the traditional anti-collision algorithm using radar ranging,the algorithm has the characteristics of high accuracy and reliability of early warning,and is more suitable for driving environment.
Key words:Beidou Positioning technology;Kalman filter prediction;MATLAB simulation
0引言
近年来,随着我国机动车保有量的迅速增加,交通安全问题越来越受到人们的重视,交通事故已经成为了我国公民主要死亡原因之一,然而在诸多交通事故中,碰撞是交通事故发生的主要表现形式[1-2]。
目前对于防碰撞算法的研究已经取得了一些成果。如蔡启仲等[3]设计了一种基于GPS与无线通讯的防碰撞车载系统,利用GPS采集到的车辆经纬度弧度位置信息,计算车辆之间的地球球心夹角,推导出两车辆相对位置的计算公式。但该算法用到的GPS定位系统存在定位可靠性低、只能单向通信的缺点。胡艳等[4]利用RSU与感知设备(如毫米波雷达、摄像头等)连接获取道路交通信息,实现V2V的信息交互,从而规避城市道路交叉口碰撞事故的发生。但充满杂波的外部环境会干扰感知设备对车辆位置、速度等信息的获取,导致虚警问题的发生[5]。针对上述问题,提出基于北斗定位的车辆防碰撞预警算法,采用北斗高精度实时动态定位技术(RNK)集成道路信息系统,定位精度可达到厘米级[6],与GPS、GLONASS、GALILEO等定位系统相比,北斗定位技术采用三频信号方案,能更好地消除高阶电层延迟的影响,增强数据预处理能力[7-9],从而提高定位的可靠性;北斗定位附加了短报文通信功能[10],GPS只能单向通信,北斗已实现双向通信功能,北斗用户利用终端不仅可以知道自己的位置,还可以通过短报文将自己的情况告知他人,这在沙漠、深山等没有网络覆盖或灾难发生通信受阻是至关重要[11-12]。主要包括构建算法构成框图、计算加速度可变的安全距离、建立并求解预测模型和算法仿真4部分。
1算法构成框图和工作原理
1.1构成框图
每个车辆装有如图1所示的电子模块,这些模块组成一个基本的防碰撞预警设备。
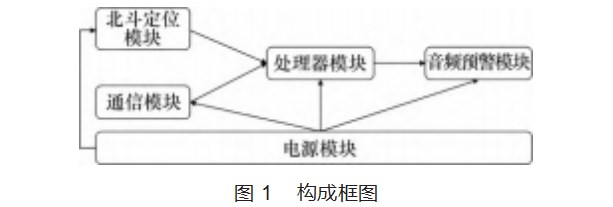
车辆通过北斗定位模块监测自车及邻近车辆的位置坐标,无线通信模块可以检测到邻近车辆的速度以及加速度等信息,在距离1 m之内的范围内进行车-车通信,处理器模块将北斗定位模块和无线通信模块传递过来的数据信息进行评估计算,并做出决策,最后将指令传达给音频预警模块,以提示驾驶员做出正确的操作。
此预警设备是基于车-车通信的基础上所研发的防碰撞预警方案,只需简单地通过北斗定位获取位置信息和通过V2V通信技术获得数据信息,预测判断是否具有碰撞风险,然后经过处理器计算能够达到安全距离的最小时间,并及时向驾驶员发出预警信息,提醒驾驶员注意。此种算法包括位置坐标的获取、卡尔曼滤波预测和碰撞情况预测。
1.2工作原理
将每台车辆安装上具有亚米级的北斗定位模块和基于V2V技术的无线通信模块,通过V2V通信技术的广播定位自车的行驶位置的北斗坐标,并且通过卡尔曼滤波接收并预测周边相邻车辆的位置信息、速度以及加速度,对周边车辆位置接收北斗位置坐标。根据所得的自车位置坐标和周边车辆位置坐标,将坐标信息分解成X与Y两个方向,利用卡尔曼预测技术分别对周边车辆的下一步位置信息、速度以及加速度进行预测判断,迅速挑选出不会碰撞和一定会碰撞的情况,对除此之外的其他情况进行分析,计算加速度有可能改变的情况下的行车安全距离,建立预测模型,将该模型分解成两个方向分析,分别求出这两个方向的时间最小值,这个值便是汽车发出预警信号的临界值,报警系统就会提醒驾驶员注意周边车辆。
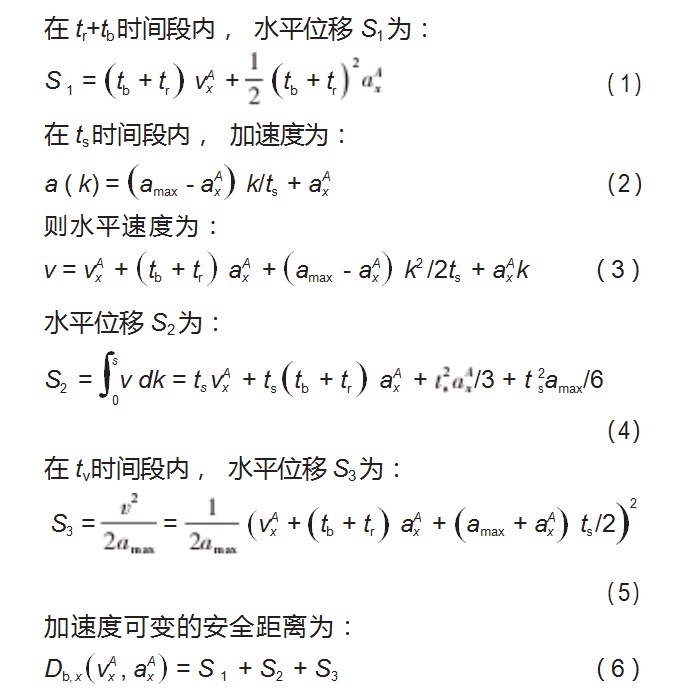
2计算加速度可变的安全距离
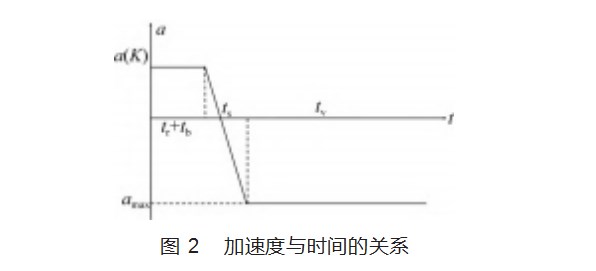
加速度与时间的关系如图2所示。
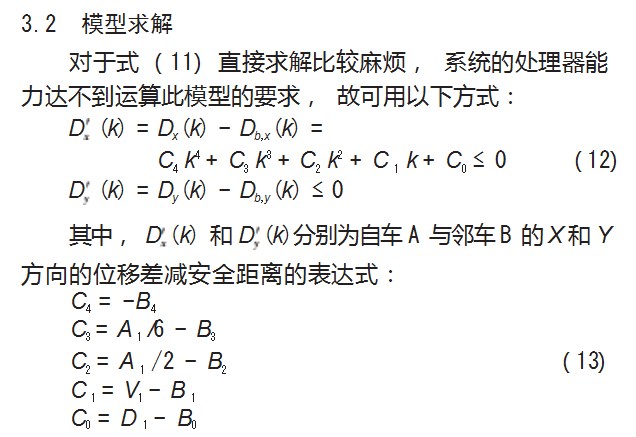
3建立预测模型
3.1模型建立
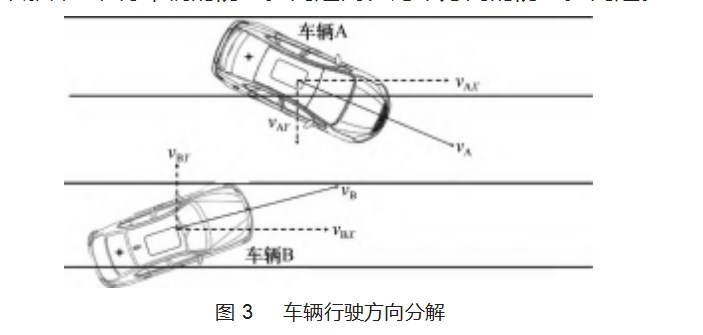
收集到自身车辆以及相邻车辆的最新坐标信息后,利用卡尔曼滤波预测算法预测t时刻车辆行驶情况以及下一时刻自身车辆和相邻车辆的位置信息,经过新坐标的不断输入,循环执行卡尔曼滤波算法,不断预测X和Y两方向新的位置信息。将该模型分解成X和Y两个方向分析,分别求出这两个方向都可以达到安全距离时的时间最小值,这个值便是汽车发出预警信号的临界值,一旦达到这个值,报警系统就会提醒驾驶员注意周边车辆。如图3所示,经过这样的转换,就将车辆的防碰撞问题简化为单方向的防碰撞问题。
在正常的行驶中,加速度实际上是不断变化的,假设加速度随时间的变化是呈线性变化的,并且在接下来的1 s内,自身车辆与相邻车辆不会发生碰撞,相对于邻车B,自车A的相对加速度为:
4算法仿真
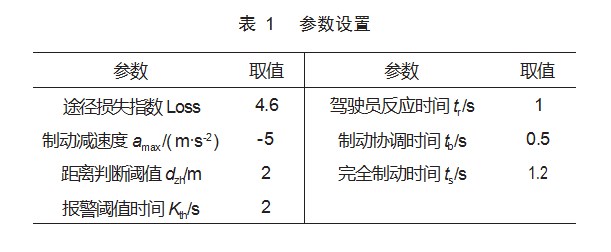
在实际应用环境中,在每辆车上都放置上述预警设备,则多辆车的碰撞问题就简化为两辆车的碰撞问题。所以,实验时,只需在两辆车上个放置一个所需的预警设备,此设备配有本文所述的所有模块,可以获取自身车辆的位置信息,并储存该数据。选取两车某个时间段采集到的位置数据进行分析,并选出部分数据信息表示相向行驶状态、同向行驶状态以及岔道口这3种情况下的变加速运动。与此同时在模拟运动中选取3个点分别模拟匀速运动以及加速运动的位置数据。运用MATLAB软件计算该时间段内的3种情况下每种运动的碰撞预测时间,位置等数据,得出仿真实验结果。如表1所示。
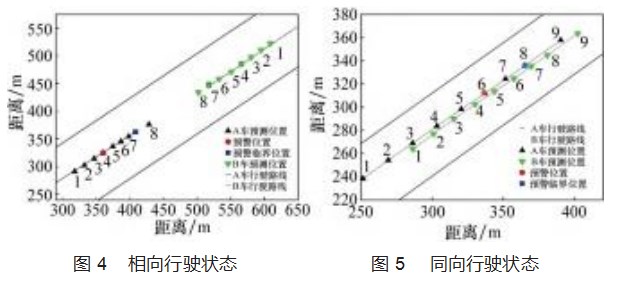
情况一:如图4所示,自车A与邻车B相向行驶,当预测位置在1~3位置时,不会发生碰撞,故无需报警;当到达4时,此时经过运算所得出的碰撞预测时间小于阀值,故在位置4时,会报警。若车辆继续行驶,到达7,此时已经到达了报警的临界值,自车A与邻车B的距离小于安全距离,所以两车会发生碰撞。
情况二:如图5所示,自车A与邻车同向相向行驶,1~5时间段内,车辆不需要报警,到达6时,此时经过卡尔曼滤波预测算法得出此时的碰撞预测时间小于阀值,故在6时会发出报警信号,若两车继续行驶,则当A车到达时刻8时,达到了预警的临界值,此时,车辆A与车辆B会发生追尾。
情况三:如图6所示,此时车辆A与车辆B行驶于一个岔路口,在1~6时刻,车辆不需要报警,当车辆行驶至7时,经过卡尔曼滤波预测算法得出此时的碰撞预测时间小于阀值,发出报警信号,若两车继续行驶,则当A车到达时刻9时,达到了预警的临界值,此时,车辆A与车辆B会发生碰撞。

综上所述,此算法可以准确地预测不同路况下的碰撞预警时间。
5结束语
本文就车辆防碰撞预警算法的近况,提出了一种基于北斗定位系统的车辆防碰撞预警算法。根据数据预判断,迅速挑选出一定会发生碰撞和一定不会发生碰撞的情况,相应采取报警以及不报警的操作。对于不能立即做出判断的情况,在加速度可变的条件下,计算两台车辆之间的实际相对距离差以及最小安全距离差,然后建立预测碰撞模型,并求解该模型。得出碰撞预测时间的最小值,将最小值与先前设定的到达最小安全距离的时间阀值作比较,一旦预测的碰撞时间小于该阀值,则执行预警操作,发出报警信号。其次,论述了算法的实现公式,最后通过MATLAB仿真,结果表明:利用北斗定位技术获取的位置信息与GPS相比准确性更高,定位精度可达厘米级,有效解决了误报虚警的问题。本文研究的算法可适用于多种路况,较研究单一路况下的防碰撞预警算法相比,具有较强的适应性;该算法对降低碰撞概率、减少交通事故发生有重大意义。
参考文献:
[1]王芳,陈哲.汽车防碰撞系统研究现状分析[J].农业装备与车辆工程,2018,56(5):28-31.
[2]来君.汽车智能防碰撞控制系统设计探讨[J].广西教育,2020(42):110-112.
[3]蔡启仲,付杰,潘绍明,等.导航和无线通讯车载防碰撞装置算法研究[J].计算机测量与控制,2012,20(8):2223-2225.
[4]胡艳,樊亚云,曹钻.城市道路交叉口防碰撞预警的研究[J].无线互联科技,2020,17(8):137-138.
[5]高继东,焦鑫,刘全周,等.机器视觉与毫米波雷达信息融合的车辆检测技术[J].中国测试,2021,47(10):33-40.
[6]甄德印,许建国.北斗高精度定位人机碰撞预警系统研究[J].铁道技术监督,2017,45(2):43-46.
[7]付伟,董绪荣,王敏,等.北斗三号三频组合观测值特性分析研究[J].全球定位系统,2018,43(5):1-8.
[8]赵磊,张云,韩彦岭,等.北斗系统三频单点定位性能研究[J].测绘科学,2015,40(7):8-14.
[9]肖凯,孙付平,王浩源,等.北斗/INS紧组合的惯性辅助三频周跳探测和修复[J].中国惯性技术学报,2018,26(2):215-222.
[10]陈正辉.基于单北斗定位及北斗短报文通讯的航标遥测遥控终端设计[J].珠江水运,2021(12):24-25.
[11]李海军.北斗导航系统与全球定位导航系统(GPS)的比较及优势分析[J].信息系统工程,2014(6):141.
[12]乔应,罗亚欧.基于北斗定位的车辆防追尾系统的研究与设计[J].新型工业化,2021,11(3):911.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!

据媒体报道,三大运营商目前均已制定了2020年... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
