SCI论文(www.lunwensci.com)
摘要:开发应用以髌骨关节面定位、在扩髓腔进行椭圆环齿截骨的胫骨内置截骨机,可有效减少截骨手术失误及切口感染,使骨折 线光滑规则并简化骨外固定器结构,但胫骨髓腔狭小的服役条件导致机械式胫骨内置截骨机的机构设计与机构组合难度很大。在功 能分析阶段提炼出设计难点问题,为避免创新设计的盲目性,基于发明问题的解决理论TRIZ 构建了圆形环齿进给机构、进退刀机 构、出收刀机构设计的矛盾冲突矩阵,在一般解中寻求出周期性作用、动态化、多用性等特定解并相应制定了具体解决方案,有效 化解了矛盾冲突、提升了设计质量和效率。为考查实现椭圆进行环切的可行性,建立了立铣刀的运动方程,利用ADAMS 进行了轨 迹仿真,在MATLAB 中进行了仿真结果分析和评价,结果表明各组合机构的运动合成可行、立铣刀轨迹误差可控。
关键词:胫骨内置截骨机,椭圆环齿截骨,机构创新设计,TRIZ 理论,运动学分析
Design and Kinematics Analysis of Tibial Internal Osteotomy Machine
Fang Tong1.Li Biwen1※,Wang Yuqi 1.Yin Ke2
( 1.School of Mechanical Engineering,University of South China,Hengyang,Hunan 421200.China;
2.The First Affiliated Hospital of University of South China,Hengyang,Hunan 421200.China )
Abstract:The development and application of the tibial built-in osteotomy machine,which is positioned on the patella articular surface and conducts elliptical ring tooth osteotomy in the medullary cavity,can effectively reduce the osteotomy error and incision infection,make the fracture line smooth and regular,and simplify the structure of the external fixator.However,the narrow service conditions of the tibial bone marrow cavity lead to great difficulties in the mechanism design and mechanism combination of the mechanical tibial built-in osteotomy machine.In the functional analysis phase,the design difficulties were refined.In order to avoid the blindness of innovative design,based on the solution theory of invention problems,TRIZ constructed the contradiction conflict matrix for the design of circular ring gear feed mechanism, advance/retract mechanism,and exit/retract mechanism.In the general solution,specific solutions such as periodic action,dynamics,and versatility were found and corresponding specific solutions were formulated to effectively resolve the contradiction conflict.The design quality and efficiency were improved.In order to check the feasibility of realizing elliptical circular cutting,the motion equation of the end milling cutter was established,the trajectory simulation was carried out using ADAMS,and the simulation results were analyzed and evaluated in MATLAB. The results show that the motion synthesis of each combination mechanism is feasible,and the trajectory error of the end milling cutter is controllable.
Key words:tibia built-in osteotomy machine,oval ring tooth osteotomy,mechanism innovation design,TRIZ theory;kinematic analysis
引言
胫骨畸形多见于胫骨折术后骨折畸形愈合[1],患者常出现下肢力线偏移现象。而胫骨畸形和力线不良会改变患者的膝、踝关节的负荷传导,导致患者出 现下肢疼痛、关节功能障碍等不适症状,进而加速下 肢关节骨关节炎进展,严重影响患者的生活质量[2]。为了矫正畸形、缓解疼痛、防止继发性骨关节炎的发生,临床一般可采用截骨矫形术将胫骨先行截断,再行骨折端的旋转、短缩或侧方移位。但传统的摆据截骨、凿断截骨的骨折线多呈横断形或短斜行,不仅容易造成 肌肉、血管等软组织的损伤,且外露的大切口易导致术后切口感染,还会引起骨折延迟愈合、血供不足等并发 症[3-6 ] 。因此,为有效纠正骨折远端旋转畸形、避免出现外露大切口造成的感染、减小截骨角度和方向的失误、缩短治疗康复时间,研发一种内置式胫骨截骨机是十分必要的。
本文设计的胫骨内置截骨机,是在以髌骨关节面定 位并对胫骨髓腔扩髓后,再行环齿形内截骨的器械。根 据截骨面的外部几何特征,按拟合椭圆进行环切是其重要功能。文中根据内置截骨方案对截骨机的定位、进给等运动需求进行了功能设计;由于该截骨机功能繁多、结构复杂,设计难度大,作者应用发明问题解决理论TRIZ 中的矛盾矩阵与相关原理,完成了机构的创新设 计,并运用运动学理论和基于ADAMS 的运动学仿真对截骨机的刀头运动轨迹进行了对比分析。
1 胫骨内置截骨机的功能设计
1.1 胫骨内置截骨方案
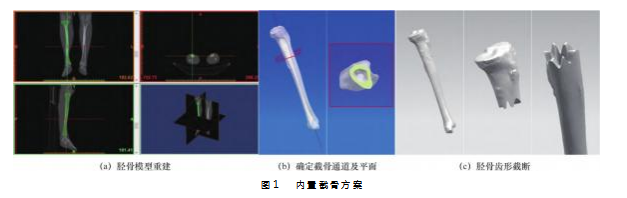
根据胫骨螺旋CT 影像学数据,基于Mimics 重建胫 骨模型,如图1 ( a ) 所示;基于Imageware 确定截骨位置、扩髓方案[7],如图1 ( b ) 所示;确定正畸方案;基 于UG 的布尔运算功能,得到扩髓、截骨装置的共用定 位面,设计内截环齿几何参数,如图1 ( c ) 所示;根据 截骨面外部几何特征,基于MATLAB 自编程序进行椭圆拟合;综合环齿几何参数及拟合椭圆确定刀头运动轨迹。环齿形接头能提供更好的生物力学性能,扩髓及环切产生的骨屑要予以保留以益于愈合。
1.2 截骨机功能设计
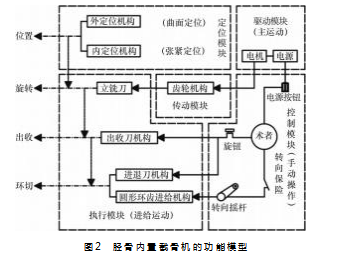
根据上述胫骨内置截骨方案,则截骨机必须具备定 位功能(包括髌骨关节定位面,以及考虑悬臂刚性问题 所增加的髓腔壁张紧定位)、主运动功能(铣刀的旋 转)、进给运动功能(形成切削轨迹)、辅助运动功能 (出刀及收刀)。综合考虑髓腔空间及传动链性质,本文 利用模块化设计原理,将截骨机划分为定位、驱动、传 动、执行与控制5个模块,图2所示为功能模型图。
2 基于TRIZ 理论的机构创新设计
2.1 胫骨内置截骨机设计难点
( 1 ) 囿于狭小的髓腔空间、繁多的内联系机构及顺 序动作、结构的多层嵌套,给结构设计、机构选择及组合、强度与刚度设计、接口尺寸设计带来诸多不便。
(2 ) 作出个性化的椭圆环齿形接头会进一步增加截骨机结构的复杂性。
设计过程中,仅采用分割、组合、嵌套原理难以创 造性地解决上述问题,通过运用TRIZ 矛盾矩阵与相关原 理,转换了思维视角,有效避免了盲目性[8],使得难点问题迎刃而解。
2.2 基于TRIZ 的技术矛盾分析
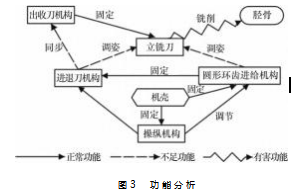
各模块功能的实现,必须以机构或机构组合来实现,故以胫骨为作用对象的内置截骨机系统应包括执行件立铣刀以及操纵机构、驱动机构、进给机构、出收刀机构等系统组件,其中进给机构由圆形环齿进给机构和进退 刀机构组合而成以实现椭圆环齿进给,还有超系统组件机壳。图3所示为按组件作用关系建立的功能分析。
( 1 ) 问题一
立铣刀由圆形环齿进给机构(摇杆机构+凸轮机构 的组合机构)控制运动时,存在调姿不足(相对于纯环 切运动,高速时存在刚性和柔性冲击) 的问题,查取 TRIZ 的39 个通用工程参数[9],分析出其技术矛盾为非单一的改善参数19“运动物体的能量”(能量增加)与 恶化的参数33“可操作性”(复杂传动链的设计受髓腔 空间的限制,使自动化操作难以实现)之间的对立。
(2 ) 问题二
进退刀机构与圆形环齿进给机构的耦合是为了实现椭圆形环齿进给截骨,体现个性化医疗。如果二者分别 独立控制立铣刀,则难以实现精确的耦合轨迹,分析出 其技术矛盾为改善的参数12“形状”( 由圆形环齿进化 为椭圆形环齿)与恶化的参数35“适应性及多用性”之间的对立。
(3 ) 问题三
为简化操纵机构,将出收刀机构、进退刀机构的控制简化设置为一个操纵盘。在操纵盘的两个极限位置上出收刀机构处于锁死状态,而在两个极限位置之间使两 个机构同步,为此必须解决改善的参数25“时间损失” (减少操纵时间)与恶化的参数36“装置的复杂性” (机构复杂程度增加)之间产生的技术矛盾。
2.3 基于TRIZ 的创新设计
2.3.1 寻找基于TRIZ 的发明原理
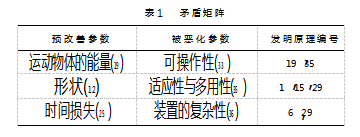
针对以上3个问题,应用TRIZ 建立矛盾冲突矩阵, 并列出带有普遍性一般解的发明原理[10],如表1所示。 在此基础上寻求适合具体实际问题的特定解,因此解决 上述问题的发明原理编号分别为19 (周期性作用)、15 ( 动态化)、6 ( 多用性)。
2.3.2 圆形环齿进给机构的创新设计
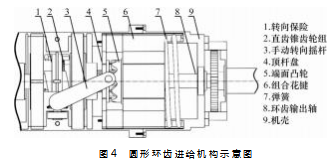
解决问题一的发明原理为“周期性作用”,具体解决方案为“改变周期性作用的频率”。问题解决的关键在于通过降低进给速度来降低进给运动频率,为此将原 设计中的圆形环齿进给机构与驱动电机的内联系断开, 外部手动操作低速进给,这样以牺牲操作方便性化解了 矛盾,同时也带来了传动链复杂性减小和机构运动能量降低的益处。
图4所示为圆形环齿进给机构的结构示意图,其工 作原理:脱开牙嵌转向保险1.转动转向摇杆3.经直齿 锥齿轮组2减速换向,端面凸轮5产生旋转运动,在顶 杆盘4及弹簧7的作用下,装配于凸轮上的环齿输出轴8产生旋转+轴向往复运动,由此带动立铣刀实现圆形环齿进给运动。
2.3.3 进退刀机构的创新设计
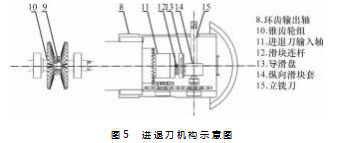
解决问题二的发明原理为“动态化”,具体解决方案为“使进退刀机构与圆形环齿进给机构可以动态相互配合实现精确耦合轨迹”。为此将进退刀机构设计为行程可调的双滑块形式,赋予其对个性化椭圆参数的适应 性,以及增强其与圆形环齿进给机构的联动性。图5所示为进退刀机构及其与圆形环齿进给机构连接的示意图,图中导滑盘13 为镂空十字槽形式,工作原 理为:进退刀输入轴11 由环齿输出轴8 经锥齿轮组10 (安装位置见图7) 驱动形成反向旋转+轴向往复运动,再经滑块连杆12 和纵向滑块驱动纵向滑块套14;导滑盘13 与环齿输出轴8运动一致。机构整体的圆形环齿运动叠加纵向滑块运动,使连接于纵向滑块套14 上的立铣刀15 作椭圆形环齿进给运动。进退刀机构元件及其连接元件均可精密制造及装配,使轨迹精确耦合得以实现并具备较高的可靠性。个性化的椭圆参数可通过调节滑块 连杆的偏心量来适应。椭圆形环齿进给运动的规律在下 文进行说明。
2.3.4 出收刀机构的创新设计
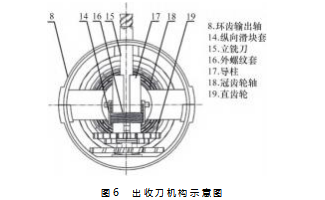
解决问题三的发明原理为“多用性”,具体解决方案为“使机构具有复合功能”。为此采用嵌套结构以及引入螺纹传动,既赋予机构多用性的同时简化其复杂性。图6所示为收刀机构的结构及其与进退刀机构的连接方式,机构的工作原理:操纵盘Ⅰ ( 图7) 为图5进退刀输入轴11 、图6冠齿轮轴18 的共同原动装置;制有内螺纹的纵向滑块套14 与纵向滑块一起作纵向往复运动;被冠齿轮轴18 驱动的直齿轮19 可使外螺纹套16 旋转并沿导柱17 滑移。出刀时,由于16 悬浮,被14 带动 向上运动,而16 的旋转运动产生与14 的相对运动,两 个运动并不干涉;当14 向上到达极限位置之后,16 在 相对运动下同时也到达极限位置顶到14.操纵盘Ⅰ将出 收刀机构锁死;当环齿输出轴8开始工作后,进退刀机 构会继续工作,与圆形环齿进给机构联动实现精确耦合轨 迹,原理在2.2.3 已叙述清楚。收刀过程在此不再赘述。
2.4 整机结构布置及操作顺序
图7所示为胫骨内置截骨机的整机结构布置,图中 显示已尽可能将机构置于胫骨髓腔之外。需要说明的是, Ⅰ 为操纵立铣刀出收和进退的手动操作盘,Ⅳ为依据个 性化髌骨关节面的反曲面设计并3D 打印的外定位机构,Ⅴ为考虑悬臂刚性问题所增加的髓腔壁张紧内定位机构。 整机是以拟合椭圆相对于关节面投影廓形的位置进行初 始调整的。
设计的操作顺序:以外定位机构Ⅳ进行曲面定位并使刀具伸至截骨面→ 调整内定位机构Ⅴ的张紧力→ 启动 电机Ⅸ使立铣刀旋转→ 转动操作盘Ⅰ 出刀→ 启动圆形环 齿进给机构Ⅲ进行椭圆形环齿铣削→ 转动操作盘Ⅰ 收刀 →关闭电源Ⅷ撤出机器。
3 胫骨内置截骨机的运动学分析
为验证所设计的胫骨内置截骨机终端运动的可行性,本文建立铣刀运动方程并进行了轨迹仿真分析。
3.1 立铣刀运动方程的建立
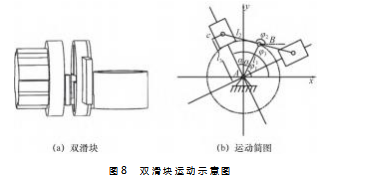
椭圆环切运动是将椭圆环齿进给运动的平面运动提取出来。依据分析图8 ( a ) 所示双滑块的具体结构及连 接,绘出图8 ( b ) 所示的运动简图。图中,主连杆矢滑槽和主连杆相对于初始位置的转向夹角。在xoy 平面 上建立基于复数矢量法[11]的双滑块运动方程。
封闭矢量位置方程为:
将式(1 ) 表示为复数矢量形式:
应用欧拉公式eiφ =cosφ +isinφ 将上式的实部和虚部分离得:
根据具体设计,令l1= l2.又φ3 -φ 1 =2 α,对上式 求解后得到纵向滑块滑动位移l3 的运动方程:
则xoy 平面的参数方程形式为:
(2 ) 齿形环切方程
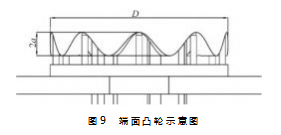
齿形环切运动是由圆形环齿进给机构实现的。对端面凸轮进行参数化建模,得到其在二维平面展开的轮廓 曲线方程:
式中:a 为凸轮齿顶高的1/2.
轮廓曲线方程参数b与凸轮齿数n、外径D 的关系如下:
b = 2 n/D n = 1.2. (7 )
( 3 ) 椭圆环齿空间运动方程
将齿形环切映射于椭圆运动上,合成椭圆环齿空间 运动,则立铣刀复合空间运动弧长公式为:
S =(2l1 cos2 α + d ) d α (8 )
式中:d 为刀头与主滑块的中心距。
将式(8 ) 与式(6 ) 、(7 ) 联立,得到立铣刀头椭 圆环齿空间运动的轨迹参数方程:
3.2 立铣刀运动轨迹仿真与分析
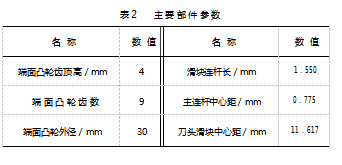
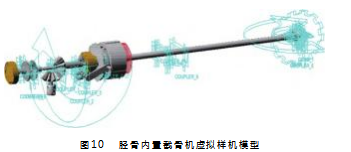
根据某人体胫骨的医学影像数据,设计内置截骨机 的主要部件参数,如表2 所示。将三维CAD 软件Solidworks 中的三维模型以Parasolid 格式导至机械系统动力学分析软件ADAMS 中,通过去除不必要的零件,将多个没有相对运动的零部件当成一个刚体来考虑简化模型[12],得到如图10 所示的虚拟样机模型。
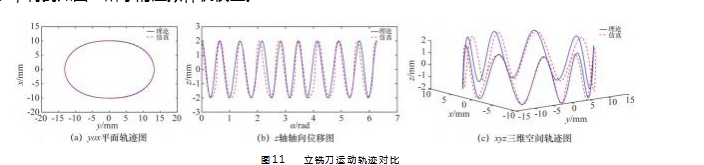
对运动部件添加约束及运动副:转向摇杆转速144d/s;凸轮与顶杆处设置为实体接触并设置压簧参数;立铣刀头中心设置为标记点进行轨迹跟踪。设置仿真参数: 时间20 s,步长200 步。通过MATLAB 软件编程求出标 记点的理论运动轨迹,并与基于ADAMS 软件得到的仿 真运动轨迹进行对比[13-14],得到图11 ( a ) 所示的标记 点平面轨迹,图11 ( b ) 所示的标记点随转角α 变化的 轴向位移,图11 ( c ) 所示的标记点三维空间轨迹。
图11 (a ) 显示标记点在yox 平面的运动轨迹仿真结 果与理论椭圆误差很小,长半轴最大误差为0.001 mm、短 半轴最大误差为0.029 mm,这说明双滑块的尺寸精度及装 配精度对于环切拟合椭圆的精度影响甚微。图11 ( b ) 显 示标记点在9 齿环切条件下,最大振幅的位移误差为 0.017 8 mm,每齿周期仿真偏差最大为0.022 89 rad 即 1.312°,但在一周的环切过程中周期误差存在抵偿性使 得其累计偏差很小,这表明了凸轮机构零件的力学性能 对齿形精度有些微影响并可进一步改进。图11 ( c ) 显示了标记点在xyz 三维空间作9齿椭圆环切运动的仿真轨迹,由前述精度分析并考虑到截骨后为上下齿形配 对,因此笔者认为胫骨内置截骨机作椭圆环齿截骨的误差是可控的。
4 结束语
机械式胫骨内置截骨机椭圆环齿截骨功能的实现,使得在狭小髓腔空间进行机构设计极为困难。本文通过应用TRIZ 发明创造原理建立了矛盾冲突矩阵,在查取到一般解的基础上寻求到特定解再给出具体解决方案,使圆形环齿进给机构、进退刀机构、出收刀机构 及其机构组合的难点问题得到有效解决,提高了设计质量和效率。运动轨迹仿真与分析结果表明了截骨机实现 椭圆环齿截骨的可行性及轨迹误差的可控性。研究结果 为机械式胫骨内置截骨机的进一步研发与优化提供了理论依据。
参考文献:
[ 1 ] 张维杰,姚舒馨,张敏,等.3D 打印定制化截骨导板辅助胫骨 畸形一期截骨+全膝关节置换1例报告[J].实用骨科杂志,2020(2 ):187-191.
[2]魏宁.胫骨中上段骨折畸形愈合对膝关节接触特性的影响[D].石家庄:河北医科大学,2018. -83.
[3]杨漪舸.胫骨纵向骨搬移前后足部皮温及血氧饱和度变化的临床研究[D].唐山:华北理工大学,2016.
[ 4 ] 王军,李华光,王燕波,等.C 形臂影像技术在闭合复位绞锁髓内针固定治疗胫骨干骨折术中对旋转畸形的预防作用[ J ].河北医药.2011 (24):3734-3735.
[ 5 ] 唐国民,张文明,徐印坎,等.骨骺分离术矫正膝关节前弓屈曲和小腿旋转畸形[J]. 中国康复医学杂志,1990(1):14-16.
[6]蔡刚,秦泗河.Ilizarov 技术矫正畸形的原则[J]. 中国矫形外 2007 ( 8 ):597-600. 医疗器械。
[ 7 ][ 8 ] 王成军,李家宝.基于TRIZ 的冷凝器清洗机器人创新设计[J ]. 包装工程,2022( 13 ):158-164.
[ 9 ] 魏晋.基于QFD/TRIZ 的玫瑰花蕾采摘机设计研究[D]. 兰州:兰州理工大学,2021.
[ 10 ] 魏奇锋,赵聪,顾新.基于TRIZ 的生物医学工程仪器创新设计[J ].工程设计学报,2011 (5 ):321-326.
[ 11 ] 孙恒.机械原理[M ].北京:高等教育出版社,2013.
[ 12 ] 胡敏,杨建国,吴雪逖,等.基于ADAMS 的有轨引导小车运动学仿真及设计改进[J].机械设计与制造,2012 ( 10 ):81
[13]张春燕,丁兵,何志强,等.转盘式多足仿生机器人的运动学分析及优化[J].工程设计学报,2022(3):327-338.
[ 14 ] Wei CHAI,Meng XU,Guo qiang ZHANG,等.Computer-aided Design and Custom -made Guide in Corrective Osteotomy forComplex Femoral Deformity[ J ].华中科技大学报:医学英 德文版,2013 ( 3 ):398-405.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58764.html