SCI论文(www.lunwensci.com)
摘要: 为解决以海洋动物为载体的传感监测系统供能问题, 构建一能量收集实验装置, 为优化设计能量收集系统提供测试设备。 为了进一步优化方案设计, 基于 FLUENT 软件对能量收集流域模型进行仿真计算分析, 探究了阻流体直径尺寸与流速对旋涡脱落 的影响。由于三维分析占用计算资源过大, 简化为二维模型进行分析。对流场内主要结构进行单一变量分析后, 结果发现进口流 场过小会使水流流速不能达到预期的稳定状态, 出口流场长度会限制圆柱后的尾流特征。最后, 对优化的二维模型在不同参数下 进行仿真计算, 结果表明阻流体直径为 15 mm 时, 作用于阻流体的脉动升力差值最大, 更适合进行能量收集。
关键词:海洋动物传感器,涡激振动,压电效应,能量收集
Simulation on Flow Around Characteristics of Fish-shaped Carrier Energy Harvesting Device in Water
Wang Zhuo, Wang Hongxi
(School of Mechatronic Engineering, Xi′an Technological University, Xi′an 710021. China)
Abstract: In order to solve the energy supply problem of the sensor monitoring system with marine animals as the carrier . An energy collection experimental device was constructed to provide test equipment for optimizing the design of energy collection system . In order to further optimize the design of the scheme, the software FLUENT was used to simulate and analyze the watershed model, and the influence of the diameter and flow velocity of the choke fluid on the vortex shedding were explored. Because 3D analysis consumed too much computing resources, so the 2D model was simplified for analysis. After a single variable analysis of the main structure in the flow field, it was found that the inlet flow field was too small, and the water flow velocity could not reach the expected stable state. The length of the outlet flow field might limit the wake characteristics behind the cylinder. Finally, the optimized two-dimensional model was simulated and calculated under different parameters . The results show that when the bluff diameter is 15 mm, the difference in pulsating lift acting on the bluff is the largest, which is more suitable for energy harvesting.
Key words: marine animal sensor; vortex-induced vibration; piezoelectric effect; energy collection
0 引言
目前大范围海洋深度立体监测困难重重[1], 传统机 电系统如航空遥感、海面观测台、水下潜标及水下航行 器等技术, 虽然能够获得大面积浅层特征或特定区域观 测点的水下环境信息, 但其在水下灵活性、适应性及稳 定性等方面存在先天不足。海洋动物经过长期的进化, 具有良好的通讯、定位、导航和复杂海域适应能力, 如 深潜、大范围跨洋洄游等, 是一种优良的天然水下航行 器。借助海洋动物搭载监测设备展开海洋环境监测, 可 以有效地扩大探测范围且延长航时, 有效避免了有源噪 声问题, 已成为未来水下移动监测技术发展的重要方 向[2-5]。但其供电问题成为制约其发展的关键因素。为此, 迫切需要研究以海洋动物为载体的高效能量收集技术。
近年来, 从环境中获取能量的微能量收集技术为无 线传感器的供电提供了一条解决途径。受制于海洋特殊的应用环境,常规的能量收集装置难以直接用于海洋流体 环境的能量收集, 尤其是海洋动物游动过程中的能量转 换。自 20 世纪 90 年代, 逐渐开始研制与开发流致振动发 电设备,至今已取得了一定的研究成果,包括压电式与电 磁式两类[6-8]。由于电磁式能量收集结构复杂、体积大、 能量收集密度低,不能满足传感监测系统集成化与微小化 的应用需求。随着微型压电振动俘能技术的发展,流致振 动的微型压电流体能量收集器的研究受到更广泛关注。
本文根据水流的涡激振动原理, 构建了一种以海洋 动物为载体的压电式能量收集装置。由于水下环境复杂, 理论和实验研究存在诸多条件限制, 因而数值仿真已成 为研究柱体绕流的有效手段。文中采用 S-A 模型下的 DES 方法进行数值仿真, 研究尾流特征并分析了阻流体 直径尺寸与流速对旋涡脱落的影响, 以期为后续工程研 究提供依据。
1 系统设计
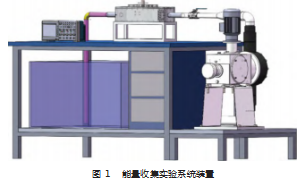
依 据 项 目 需 求 设 计 了 一 套 能 量 收 集 实 验 测 试 系 统[9- 12], 整个实验系统由 3 部分组成, 即水泵提供的流速 可调节的流场区域、涡激振动产生与能量收集的实验腔 体以及实现能量转换的发电部分, 如图 1 所示。
1.1 主要结构设计
目前所设计的涡激振动能量收集系统装置具有局限 性, 它仅仅是为研究某一压电收集装置发电效率而搭建, 在面对以海洋环境监测和动物轨迹监测自适应能量收集 系统研究的背景下就不适合进行实验。本设计针对这一 局限性提出解决办法, 压电能量收集装置固定安装在鱼 形载体上, 所设计的鱼形载体如图 2 所示, 可以进行左 右摆动使其尽可能模拟海洋动物的活动姿态。为了使发 电部分很好的固定在鱼形载体上, 且便于零件安装与拆 卸, 因此设计出如图 3 所示的固定装置。图 4 所示为鱼形 载体能量收集装置示意图。
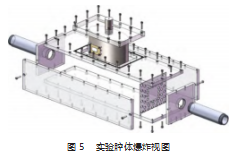
实验腔作为涡激振动产生与能量收集的场所是实验 系统的重要部分, 如图 5 所示。为进一步验证与优化实 验装置, 需对实验腔体内部鱼形载体能量收集装置所在 场域进行流体仿真分析。
1.2 主要设备选型
1.2.1 水泵
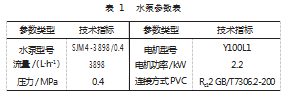
由于实验要求流速可调, 而计量泵性能优越, 其中 隔膜式计量泵安全性能高, 计量输送精确, 流量可以从 零到最大定额值范围内任意调节, 压力可从常压到最大 允许范围内任意选择。调节直观清晰, 工作平稳、无噪 声、体积小、重量轻、维护方便, 可并联使用。查阅资 料对比之下, 选用上海申贝泵业制造有限公司的 SJM4- 3898/0.4 机械隔膜计量泵, 该型号水泵参数如表 1 所示。
1.2.2 阻流体
由于本文为以海洋动物为载体的微区间小型传感器 设备供电, 实验设定模拟流速为 1 ~ 10 m/s。当雷诺数 Re 在 300 ~ 3×105 区间内, 处于亚临界区的圆柱绕流有着丰 富的特性。根据雷诺公式 (1), 可计算出圆柱的直径范 围约为 0.000 302 1 m≤L≤0.030 21 m。由于直径尺寸为 0.000 302 1 m 的圆柱并没有实际的意义。综合装置预留 空间以及从仿真建模的角度和实验的可操作性来考虑, 将圆柱直径设定为 0.005 m 为便于与黄片安装固定, 初步设定其尺寸为直径 10 mm、高 33 mm。
式中: U 为流体的来流速度, m/s; L 为圆柱结构的直径 (对于圆柱结构在均匀流速的环境中), m; ν 为运动学黏 性系数, m2/s, 常温下水的运动学黏性系数 ν = 1.007 × 10-6 m2/s。
2 仿真方法及验证
2.1 模型建立与仿真实验方案
假设: 实际鱼形载体能量收集装置是运动的, 水流 体介质是静止的, 文中假设能量收集装置静止不动, 赋 予流体水介质相对速度即来流速度 U, 来研究装置柱体 绕流, 并认为二者是等效的。
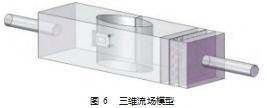
所构造的流场模型如图 6 所示: 中心流场长 430 mm, 宽 120 mm, 高 100 mm, 流 体 出 入 口 管 道 长 度 设 定 140 mm, 管径 26 mm; 右端为水流入口, 距阻流体中心 422 mm; 左端为出口边界, 定义为压力流出边界, 阻流 体 直 径 为 10 mm, 连 接 在 长 47 mm, 宽 28 mm, 厚 度 0.08 mm 的薄板上并位于中间鱼形载体左侧 8 mm 处。为了使水流加强对阻流体的冲击在鱼形载体右侧放置了挡 板进行阻隔。
本文使用 SolidWorks 软件进行三维流场模型的绘制, 因为装置中具有厚度 2 mm 的过滤孔板, 为了方便之后网 格划分, 加强网格质量, 绘制三维流体模型时划分了 3 个模块, 在过滤板孔板左右 25 mm 处划分。
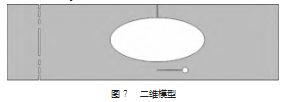
由于三维分析占用计算资源过大, 因此简化仿真模 型进行二维模型的流场仿真分析。图 7 所示为计算流场 区域二维模型。
2.2 网格划分及湍流模型
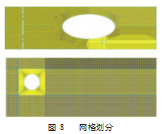
柱体绕流是由柱体外围边界层复杂湍流流动引起的, 所以网格质量直接影响数值计算结果。在 Gambit 软件中 进行二维模型的网格划分。为了准确观测旋涡脱落的形 态, 对柱体周围网格进行加密。在不影响计算精度的情 况下, 为了减小计算资源的占用, 加快计算速度, 网格 密度圆柱中心向四周逐渐减小。得到如图 8 所示的模型 网格图。模型总体网格数为 1.27×105 个。
计算湍流运动主要有 3 种方法: 直接数值模拟方法、尺度解析模拟方法和雷诺时均模拟方 法 。
ANSYS FLU ⁃ENT19.0 提 供 了 8 种 湍流模型。应根据研究目的尽可能选择适合的模型。常用湍流模型如标准 k- ε 模型, 但是仿真效果并不 理想。经查阅相关文献资料以及仿真尝试, 最终选取分 离 涡 湍 流 模 型 (DES)。 分 离 涡 模 拟 是 一 种 雷 诺 平 均 ( RANS) 与大涡模拟 (LES) 相结合的方法。其基本原 理: 在近壁区采用 RANS 方法模拟, 用湍流模型模拟其 中的小尺度脉动运动; 在远离物面的区域, 用 LES 方法 模拟来捕捉大尺度的分离流动。
仿真进口速度设置1 m/s。非稳态设置需要进行步长等 参数设定。时间步长Δt = 0.05 s, 时间步数为 1 000 步, 每 次迭代的最大步数为20 步。流体介质取为水介质。
3 仿真结果与分析
根据鱼型载体的水下设计仿真实验方案, 以来流速 度为 1 m/s 来研究鱼形载体能量收集装置水下流场特性、 升力和阻力的变化规律。
3.1 升力系数、阻力系数及斯特劳哈尔数
涡激振动是当流体绕过非流线型柱形体时, 固体后 产生的交替脱落的涡旋脱落导致固体振动的现象。当来 流冲击阻流体, 来流作用于柱体上的作用力分为与来流 方向垂直的脉动升力和来流方向一致的阻力。脉动升力 主要是由于涡街形成时旋涡交替自柱体脱落而使柱体两 侧压力产生脉动而造成的。阻力主要是流体绕流柱体时 由于表面摩擦阻力和柱体前后压差造成的。
升力系数 Cl 和阻力系数 Cd 是描述绕流对柱体作用力 的重要参数。斯特劳哈尔数 Str 则是描述旋涡脱落非定常 性的特征参数, 反映了绕流对柱体作用的非定常特征。 三者定义分别为:
式中: Fl 为圆柱受到的横向力; Fd 为圆柱受到的流动方 向的力; ƒ 为旋涡脱落频率; u0 为均匀来流速度。
3.2 尾流特征讨论
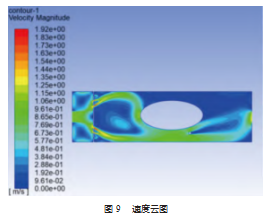
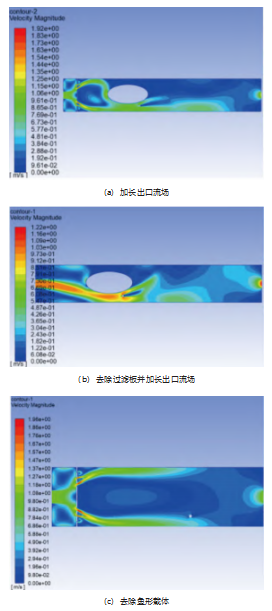
求解结果如图 9 所示, 由速度云图可看出阻流体后 端产生的尾流发散, 并未出现周期性脱落的旋涡。为探 究其结果影响因素进行了结构对比。由图可知尾流部分 长度与所留出口长度相近, 考虑可能出口流场过短限制 了圆柱绕流后卡门涡街现象的产生, 因此加长出口流场进行仿真, 出口流场在原来基础上延长 300 mm; 其次考 虑流场中过滤孔板和鱼形载体对结果的影响。
图 10 所示为仿真对比。由图中 (a)、(b) 相较可以 看出过滤板对结果的影响较大, 过滤孔板的作用为使泵 出口水流能达到相对稳定的状态, 而在二维模型中并不 能很好的体现出它的作用。图 (c) 为去除鱼形载体后的 仿真结果图, 去除载体后加大了过流面积流速显著降低, 而流速对涡激振动现象而言是一个重要的影响参数。所 以仅图 (c) 不能说明鱼形载体的影响。因此以载体和壁 面为边界截出新的流场区域进行仿真, 如图 (d) 所示, 可以清楚的看见尾部有明显的抖动。
经过比对可以发现二维模型中过滤孔板对结果影响 最大, 鱼形载体影响较小。为得到有价值的仿真效果, 对二维模型进行优化, 首先加长进口流场, 设定进口流 速为经过过滤板且流经一段距离后稳定的水流流速, 同 时加长出口流场以取消流场过小对尾流特征的影响。
3.3 优化后模型的有限元流场仿真分析
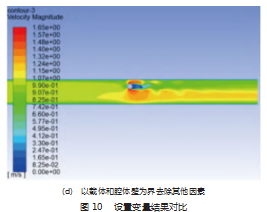
对比分析发现, 流场区域大小对结果影响较大, 因 此加大流场长度, 流场区域长 800 mm, 宽 120 mm, 椭 圆圆心距入口 300 mm。优化后模型网格划分, 总体网格 数为 2.3×104 个。如图 11 所示。
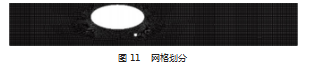
图 12 所示为阻流体直径 10 mm, 来流速度 1 m/s 情况 下, 采用 DES 模型得到的速度云图。由图可看出优化的 二维模型可以较好的模拟出本文流场中圆柱绕流情况。
3.4 不同流速下的尾流状态及升力阻力
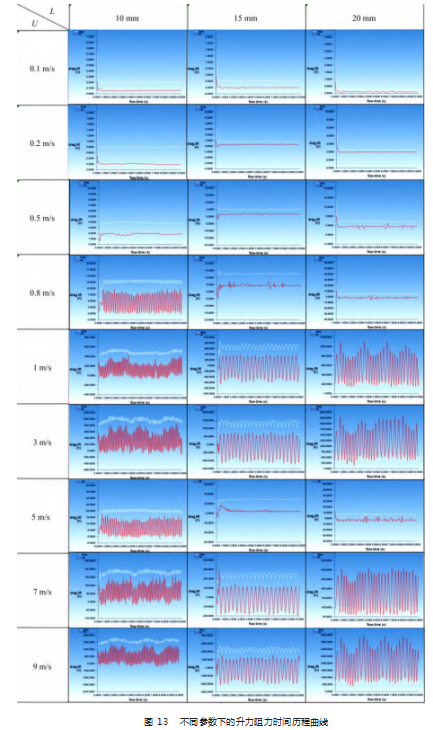
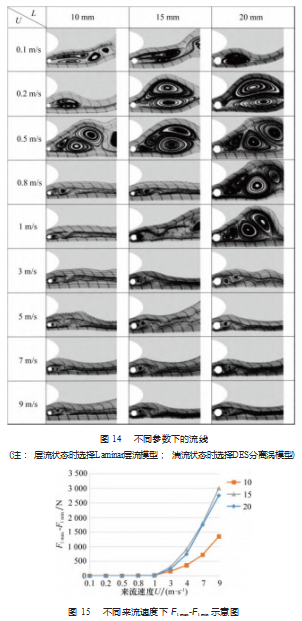
首先选取阻流体直径为 10 mm、15 mm、20 mm 三种 尺寸, 在0. 1 m/s、0.2 m/s、0.5 m/s、0.8 m/s、1 m/s、3 m/s、 5 m/s 、7 m/s 、9 m/s 九种来流速度下进行分析, 得到升 力阻力时间历程曲线图及不同参数下的流线图, 如图 13 和图 14 所示。为保证结果的可对比性, 设定一样的计算 时间。时间步长 Δt = 0.05 s, 时间步数为 600 步, 每次迭 代的最大步数为 20 步。
圆柱绕流会产生涡街效应, 涡街形成时旋涡交替自 柱体脱落, 柱体作用周期性变化的脉动升阻力, 导致柱 体振动。因此可以通过分析作用于圆柱的脉动升力, 来 预判不同阻流体尺寸与来流速度下, 实验中柱体产生振 动效果的好坏。图 15 所示为 3 种尺寸在不同来流速度下,Fl max-Fl min 的变化折线图。可看出, 在一定流速范围内, 随着流速的增加 Fl max-Fl min 差值越大, 且相较于 10 mm 与 20 mm, 阻流体直径为 15 mm 时, 作用于主体的升力 Fl max-Fl min 差值更大。因此可预判, 在实际实验中选用直 径为 15 mm 阻流体时, 更易达到更好的实验效果。
4 结束语
本文用 FLUENT19.0 仿真软件对基于涡激振动能量 收集装置流场部分进行了简化二维模型仿真分析, 但是 所得结果并不理想。为探究影响因素, 对流场内主要结 构进行单一变量分析, 对比结果推断过滤孔板对仿真结 果影响最大, 鱼形载体影响较小, 出口流场区域过小可 能会改变尾流运动状态。基于此对二维模型进行优化, 加长流场区域, 去除过滤板, 流场入口流速即为经过过 滤板且流经一段距离后稳定的水流流速。进行模型优化 后再次进行仿真分析, 探究阻流体尺寸及来流速度对 涡 街脱落的影响。分析阻流体尺寸为 10 mm 、 15 mm、20 mm 时, 在 9 组不同来流速度下的漩涡脱落状况以及 一定时间内升阻力历程曲线。最后得出了本文研究的涡 致振动能量收集器中阻流体直径为 15 mm 最优的结论。
文中的研究结果对于以海洋动物为载体的能量收集 系统设计有一定的参考价值。但是基于涡激振动能量收 集装置的研究和相关参数检测仍然有许多工作有待于进 一步开展。对流场区域进行流- 固- 电多项耦合分析, 可 分析能量收集器在水流的作用下模态的变化, 以及对压 电材料能量转换的过程进行分析, 经过后处理可得出收 集器发生涡激振动的最佳模态。因此, 在后续工作中有 必要尝试开展多项耦合分析。
参考文献:
[1] McMahon C, Roquet F, Bestley S, et al. Animal Borne Ocean Sensors -AniBOS-An Essential Component of the Global Ocean Observing System[J]. Frontiers in Marine Science, 2021(8):1- 12.
[2] 史建国,蔡雷 . 基于海洋动物载体的传感器监测技术现状及发 展方向[J]. 山东科学,2015.28(5):41-48.
[3] Chung H,Lee J, Lee W Y A. Review:Marine Bio-logging of Ani ⁃ mal Behaviour and Ocean Environments[J]. Ocean Sci, 2021. 56: 117- 131.
[4] Harcourt R , Sequeira A M M , Zhang X , et al. Animal-Borne Telemetry: An Integral Component of the Ocean Observing Tool⁃ kit[J]. Frontiers in Marine Science, 2019(6):326.
[5] Treasure, Anne M. Marine Mammals Exploring the Oceans Pole to Pole: A Review of the MEOP Consortium[J]. Oceanography So⁃ ciety, 2017. 30(2):132-38.
[6] 练继建, 燕翔, 刘昉 . 流致振动能量利用的研究现状与展望[J]. 南水北调与水利科技,2018.16(1):176- 188.
[7] 阚君武, 富佳伟,王淑云,等 . 涡激振动式微型流体俘能器的研 究现状与展望[J]. 光学精密工程,2017.25(6):1502- 1512.
[8] L A Weinstein, M R Cacan, P M So, et al. Vortex shedding in⁃ duced energy harvesting from piezoelectric materials in heating, ventilation and air conditioning flows [J]. Smart Materials & Structures, 2012. 21(21): 45003-45012 .
[9] 侯诚 . 水电站监测传感元件的压电振动供能研究[D]. 南昌:南 昌工程学院,2016.
[10] 崔宜梁 . 基于卡门涡街效应的柔性压电发电装置系统设计 . [D]. 青岛:青岛大学,2018.
[11] 李宏亮 . 基于流致振动的水下压电俘能模拟与实验研究[D]. 哈尔滨:哈尔滨工业大学,2018.
[12] 王金亮 . 涡致振动压电能量收集结构的数值模拟与实验探 索[D]. 沈阳:沈阳化工大学,2019.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58436.html