SCI论文(www.lunwensci.com)
摘要:针对当今世界荒漠化严重、草方格固沙方式社会效益低等问题, 基于慧鱼模型设计了一款新型的沙漠种植机, 利用生态固 沙剂进行新型沙漠灌草种植。分析了传统草方格固沙方式存在的不足, 设计了一种集松沙机构、播种机构、开沟机构、覆压沙机 构、固沙剂喷洒机构、升降机构与底盘为一体的沙漠种植机, 运用 Soildworks 三维软件进行整体设计, 画出机构原理图进行了详细 的运动分析, 并用慧鱼模型搭建了测试样机。采用 ROBOPro 软件进行模块化的电气控制程序设计, 设计了多种智能化系统及人机 交互系统, 并在沙地进行了实地种植测试。实验结果表明, 各机构之间工作协调, 控制方案设计合理, 沙地种植效果良好, 为应 用生态固沙剂的沙漠种植机的研制提供了理论依据。
关键词:沙漠治理,固沙剂,防风固沙,种植机,慧鱼模型
A Desert Planter Design with Ecological Sand-setting Agent
Liao Tao, Wang Xin, Xiao Yao, Ouyang Qing, Liu Jinliang, Wang Hongjun ※
(College of Engineering, South China Agricultural University, Guangzhou 510642. China)
Abstract: In view of the problems of serious desertification and low social benefits of grass square sand setting in the world, a new desert planter was designed based on the fishertechnik model to use ecological sand setting agent for new desert sand planting . The shortcomings of the traditional grass square sand fixation way were analyzed, a set of sand mechanism, sowing mechanism, ditch mechanism, covering sand mechanism, sand fixing spraying mechanism, lifting mechanism and chassis of the desert planter was designed, using Soildworks 3D software for the overall design, draw the mechanism diagram for the detailed motion analysis, and set up test prototype based on fishertechnik model. ROBOPro software was used for modular electrical control program design, and a variety of intelligent systems and human-computer interaction system was designed. The field planting test was conducted in the sand, and the experimental results showed that the work coordination between institutions, good work effect, reasonable control scheme design and good sand planting effect, which provided a theoretical basis for the development of desert planter using ecological sand setting agent .
Key words: desert control; the sand setting agent; windbreak and sand setting; planter; fishertechnik
0 引言
我国作为世界上受荒漠化影响最严重的国家之一, 沙漠生态修复治理长期以来都是国家最看重的一项工程。 当今治沙工程多以人工或机械化在沙地上铺设草方格的 方式进行, 但人工草方格种植耗时耗力、机械化草方格 种植也存在着预处理成本大、设备笨重以及种植过程碾 压率高等问题, 成效并不理想。且同时播种的牧草和蓖 麻等沙漠经济作物的种子, 幼苗死亡率达 30%~40%, 某 些作物甚至高达 60%, 需多次补种, 效果欠佳。
随着我国在固沙工程上的不断研究与突破, 2016 年, 中国石油大学开发完成并成功应用了一种新型生态固沙 剂,标志着我国在沙漠固沙技术领域有了新的突破。康惠 芬等[1]制备了一种新型高分子环保固沙剂, 具有较强的保 水性,抗风蚀性、耐水蚀性和抗压性,意味着固沙剂逐渐 成为未来固沙工程的发展方向。在沙漠栽种治沙植被时,播种后向沙土表面喷洒一层生态固沙剂,喷洒的固沙剂裹 挟沙面沙砾凝固形成一个固化膜层,当有自然降水时,该 固化膜层逐渐下渗增厚,并可长时间维持,厚度最大可达 3~5 cm,能有效地防止风蚀,且起到吸湿和减少土壤水分 蒸发的作用, 最终实现固定、绿化沙丘, 改善生态环境 的目的。当沙漠植物抵抗风沙侵蚀顺利发芽成活后, 该 固化膜层又可逐步溶于雨水回归自然, 无毒无害[2-4]。
目前国内外并未在固沙剂与沙漠种植结合上取得较 大突破。在国内, 李卫卫等[5]设计了一种沙漠压沙种草 机, 利用种草轮插入沙面的阻力与复位弹簧开合播种, 但并未进行覆沙、压沙等步骤, 使种子暴露在沙面; 梁 建平等[6]设计了一种固沙剂灌草种子喷播一体机, 但采 用风中混合仓的喷播方式, 未能较好保证播种的均匀性。 而且国外并未有集生态固沙机喷洒及固沙种子播种一体 化的机械设备问世。
综合当前世界对生态固沙剂与沙漠播种机的研究, 本文提出了一种基于慧鱼模型的集底盘、松沙机构、播 种机构、开沟机构、覆压沙机构、固沙剂喷洒机构、升 降机构于一体的应用生态固沙剂的沙漠种植机。
1 沙漠种植机整体方案设计与工作流程
1.1 整体方案设计
该沙漠种植机主要由 7 大机构组成, 分别是底盘、 松沙机构、开沟机构、播种机构、覆压沙机构、固沙剂 喷洒机构以及升降机构[7- 13]。在这些机构的集成作用下, 该机器可以实现松沙、开沟、播种、覆沙、压沙、喷洒 生态固沙剂等功能, 各个功能协调运转, 全自动完成应 用生态固沙剂的沙漠种植工作, 其整体结构如图 1 所示。
1.2 工作流程
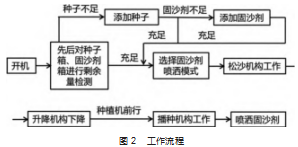
该沙漠种植机工作流程如图 2 所示。工作人员启动 沙漠种植机, 机器通过超声波传感器先后对种子箱和固 沙剂箱剩余量进行一次检测。若剩余量不足, 种子箱和 固沙剂箱对应指示灯亮起, 蜂鸣器响起提醒工作人员添 加种子或固沙剂; 若剩余量充足, 则工作人员根据工作 地沙漠化程度选择固沙剂的喷洒模式 (模式 1 及模式 2), 完成工作预处理。
完成工作预处理后, 松沙机构下降开始松沙工作, 随后升降机构下降, 带动开沟机构、覆压沙机构, 压沙 装置气缸进气, 使压沙滚轮压紧沙面。种植机前行, 播 种机构开始工作, 通过凸轮运动推出种子, 最后处于机 器尾部的固沙剂喷洒机构开始工作, 对已完成压沙步骤的沙面进行固沙剂喷洒, 使沙面沙砾凝固形成固化膜层, 便于种子生长。
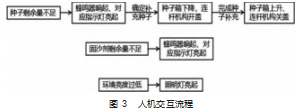
种植机工作期间持续对种子箱和固沙剂箱进行实时 检测与反馈, 当种子箱内种子或固沙剂箱内固沙剂剩余 量小于所设定值时, 将提醒工作人员及时补充种子或固 沙剂。当人们通过显示屏确定补充种子时, 种子箱通过 螺杆下降, 便于工作人员补充种子。当机器工作环境亮 度低于所设定值时, 照明灯亮起, 保证夜间工作的安全 性。如图 3 所示。
2 主要机构方案及工作原理分析
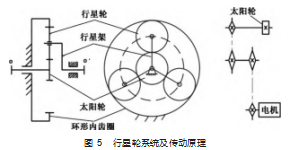
2.1 松沙机构设计
松沙机构结构设计如图 4 所示, 其功能是铺平且松 动种植机前进方向上的沙子, 以达到优化播种效果与降 低对开沟机构、覆压沙机构的损伤。
松沙机构位于种植机最前端, 设计行星轮系统, 将 行星轮作为松沙刀, 对行进方向上的沙面进行松动作业。 该机构工作时, 减速箱电机前进, 通过连杆机构与固定 在环形内齿圈上的转动副, 将行星轮松沙刀头部通过 连杆压入沙面, 通过链传动带动太阳轮, 使行星轮松 沙刀进行公转运动, 对其接触到的沙面进行松沙工作。 当结束工作时, 减速箱电机向后运动, 通过连杆机构 将行星轮松沙刀带离沙面。行星轮系统及传动原理如 图 5 所示。
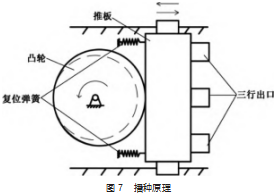
2.2 播种机构设计
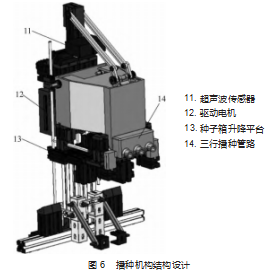
播种机构结构设计如图 6 所示。其功能是利用复 位弹簧、凸轮的远行程与近行程原理, 恒速、衡量地 进行三行播种。为利用重力势能与方便工作人员补充 种子, 将播种机构的种子箱设计在微型升降平台上。 当工作人员需补充种子时, 种子箱通过螺杆运动下降,且此时种子箱盖将通过连杆打开, 方便工作人员补充 种子。
播种器将凸轮与滑块相结合, 利用凸轮的远行程与 近行程原理, 凸轮电机的旋转速度为 ω, 此时推板在复 位弹簧的作用下以速度 v 做往返运动, 即保证了恒速与 恒量的需求。并且利用重力势能, 将推出的种子沿着三 行与开沟机构相连接的管道下落, 保证了播种的准确性。 播种器原理如图 7 所示。
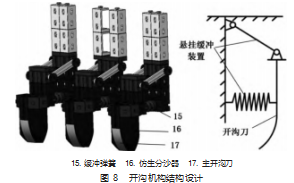
2.3 开沟机构设计
开沟机构结构设计如图 8 所示。其功能是在沙面刮 开连续的凹槽沟槽, 为播种工作提供前提条件。
开沟机构整体为避免因长期在沙面以下工作导致受 损严重, 设计了悬挂式缓冲装置; 开沟刀由主开沟刀和 仿生分沙器组成。当开沟机构遇到松沙机构未能完全处 理的硬质沙块或石头时, 悬挂式缓冲装置会依靠弹簧的 作用降低对开沟机构的损伤。
因蓝鳃金枪鱼具有很大的高速耐力, 鱼体呈纺锤形, 近似于鱼雷, 前 2/3 基本为刚性。经千万年演变, 蓝鳍 金枪鱼下颚形成了流线型曲线, 在其快速前进时, 降低 工作阻力且水流快速从两侧流开, 适合于开沟机构分沙 器的应用要求。因此保留蓝鳍金枪鱼下颚曲线的基础上, 将原有仿生曲线重构为三维曲面。分沙器仿生曲面受力 分析如图 9 所示。
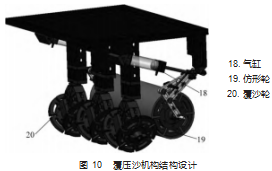
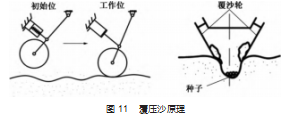
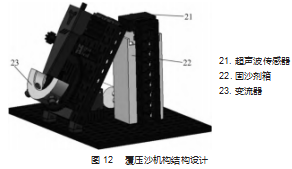
2.4 覆压沙机构设计
覆压沙机构结构设计如图 10 所示。其功能是将已播 好种子的沟槽回填且进行镇压工作。
覆沙轮由成锐角的两被动滚动轮组成, 当种植机前 进时, 与沙面接触的覆沙轮因摩擦力的作用而产生滚动, 因其成锐角而将沟槽两侧的散沙推回沟槽中, 完成覆沙 工作。
压沙装置由横向仿形轮和带弹簧式气缸组成。当升 降平台下降时, 仿形轮并未接触沙面, 处于初始位。此 时气泵工作, 使气缸活塞杆推出, 通过转动副和连杆将 仿形轮下压, 使其压紧沙面, 处于工作位。使用带弹簧式气缸作为压紧源, 即保证了对沙面的压紧力一定, 降 低了仿形轮连接架受损的可能性, 又当结束工作时, 气 缸因弹簧作用自然上升, 且存在自锁功能。覆压沙原理 如图 11 所示。
2.5 固沙剂喷洒机构设计
固沙剂喷洒机构结构设计如图 12 所示。其功能是为 已完成覆压沙工作步骤的沙面喷洒固沙剂, 使沙面形成 固化膜层, 保证种子的发芽率。
固沙机喷洒机构设计了基于蜗轮蜗杆的调节器, 用 根据工作地点的沙漠化程度来选择不同的模式, 以避免 固沙剂的浪费。并且利用雾化喷头作为喷洒口, 保证喷 洒的均匀性。同时还设计了超声波传感器用以监控固沙 剂的剩余量, 及时提醒工作人员添加固沙剂。两种固沙 剂喷洒模式参数如表 1 所示。
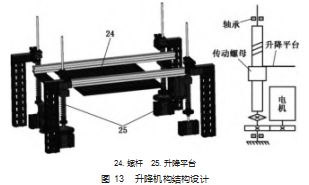
2.6 升降机构设计
升降机构机构结构设计如图13所示。其功能是将固定在 升降平台上的开沟机构以及覆压沙机构压入沙面进行工作。
升降机构通过 4 根螺杆连接, 并且两根螺杆之间使 用链传动, 中间部分使用铝型材连接。升降平台下安装 有开沟机构和覆压沙机构。该机构使用链传动, 传动比 准确、无滑动、效率高、结构比较紧凑、能传递更大的 功率。使用螺杆实现上升与下降, 运动准确且能实现升 降平台的自锁功能。
3 控制系统设计
3.1 控制模块
本沙漠种植机核心控制部件为 3 块慧鱼 TXT 控制器, 并通过接触屏幕控制。 1 块用于控制小车的整体运动 (运动控制器), 2 块用于控制小车整体功能 (工作控制 器)。用户可通过工作控制器显示屏来选择车子的播种模 式, 当选择好模式后, 可通过运动控制器来使种植机沿 规定路线工作及停止。
3.2 程序设计总思路
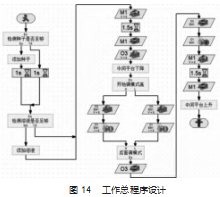
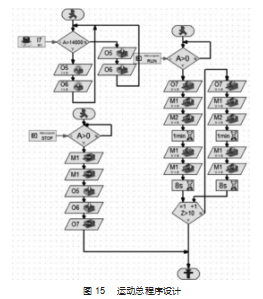
本沙漠种植机的程序设计由工作总程序及运动总程 序两部分组成。工作总程序如图 14 所示。该总程序图由 检测种子是否足够子程序、添加种子子程序、检测溶液 是否足够子程序、添加溶液子程序、中间平台下降子程 序、开始调节模式高子程序、后调节模式子程序、中间平 台上升子程序等组成。种植机的运动总程序如图 15 所示。
3.3 松沙装置模块设计
松沙机构升降是由两个同步的减速箱电机通过并联, 连接到慧鱼 TXT 控制器的 M1 端口, 当程序通过检测部 分后, 两个电机同步启动, 并在 1.5 s 后到达指定位置并 停止。行星轮通过一个连接 O3 的迷你电机来带动, 并运 行到程序结束。
3.4 播种装置模块设计
播种机构由种子箱和播种器组成, 种子箱上装有超 声波测距仪与慧鱼 TXT 控制器的 IF1 L6 连接, 当测距器 测得的距离超过 5 cm 时, 会触发连接在 EM1 O4 上的警 报灯和警报器, 并且程序会自动跳转到添加种子子程序。 工 作 控 制 器 弹 出 “AD” 和 “RE”, 按 下 AD 后 连 接 在 EM1 M3 上的电机会正转 300 个脉冲距离, 使种子箱向下 移动。当装好种子后, 可按下 RE, 此时连接在 EM1 M3 上的电机会反转 300 个脉冲距离, 使种子箱回到原位, 此时程序会跳转到下一个子程序。如图 16 所示。
3.5 压沙装置模块设计
在压沙装置上, 带弹簧式的气缸接有一个气压阀和 气泵, 气压阀和气泵分别连接在慧鱼 TXT 控制器上的EM1 O1 O3 上, 当升降机构下降到指定位置时, 气泵和气 压阀同时被供电, 使气泵推杆前进, 仿形轮紧贴地面。当按 下ST时, 气压阀和气泵同时关闭, 气缸收缩, 仿形轮归位。
3.6 固沙剂喷洒装置模块设计
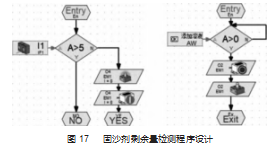
在装有固沙剂的储存箱上面有超声波测距仪通过连 接到慧鱼 TXT 控制器的 L1 端口, 当超声波测距仪测得的 距离超过 5 cm, 连接在 EM1 O4 上的警报灯和蜂鸣器会 开始工作, 且程序会跳转到添加溶液子程序, 待添加完 固沙剂后可按下 AW, 警报灯和蜂鸣器会停止工作且程 序会继续向下执行。如图 17 所示。
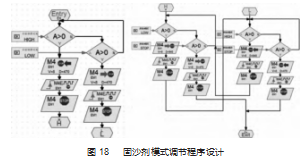
在慧鱼 TXT 控制器上 EM1 M3 上接有一个电机, 通 过蜗轮蜗杆结构连接到调节器上, 可以通过按下“HI” 和“LO”来调节模式, 当按下 HI 时, 电机会反转到达 功率较大的喷嘴, 当按下 LO 时, 电机会正转到功率较小 的喷嘴, 也可以按下 ST 来结束程序, 此时喷嘴会归位到 原来的位置。如图 18 所示。
3.7 升降装置模块设计
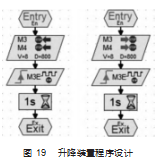
升降机构采用两个同步的步进电机分别接在了 M3 和 M4 上, 当松沙机构下降到指定位置后, 中间平台会同步反转, 使工作平台下降到工 作 位 置, 当 按 下 ST时, M3 、 M4 电 机 会 正转, 使工作平台复位到原来的高度。如图 19 所示。
4 整机实地实验验证
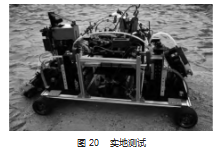
为了验证设计的合理性与可行性, 同时也为了更好 地进行测试, 故对整机进行了慧鱼模型的组装, 完成了 硬件系统的搭建。部分零件采用 3D 打印技术制作, 实地 测试如图 20 所示。
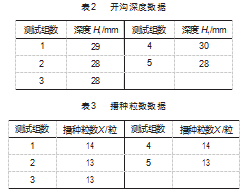
在实地测试中, 主要考察指标为开沟深度以及每次 播种的种子粒数。根据设计方案, 开沟深度应处于 25~ 35 mm 之间, 每次播种数量应为 10~15 粒 (以柠条种子 为例)。实验设置种植机前进速度为 0.2 m/s, 播种速度 为 1 r/s, 令种植机工作前行 10 m, 按随机取样原则, 利 用米尺及钢卷尺收集 5 组数据, 开沟深度数据记录如表 2 所示, 播种粒数数据记录如表 3 所示。将实验数据与开 沟深度以及播种粒数的性能指标对比, 开沟深度及播种 粒数均满足性能指标要求, 沙漠种植机主要性能达到设 计需求, 设计合理。
5 结束语
本文将生态固沙剂与沙漠种植工程相结合, 依照 所需的功能要求, 基于慧鱼模型设计出结构简单、功 能齐全的沙漠种植机。相比于传统的草方格固沙方式, 利用生态固沙剂进行沙漠种植的方式具有社会效益性高、固沙能力强、可持续发展性好等特点。在实验中 表明, 本机器能实现新型沙漠种植的松沙、开沟、播 种、覆沙、压沙以及喷洒固沙剂等步骤。本文整机的 设计方案与各功能机构的模块化设计组合具有创新性 的意义, 智能化、人机交互性的设计更符合当今社会 发展的主题, 模块化的编程程序可移植性强大, 可以 进行商业化生产。因此, 本沙漠种植机具有良好的现 实意义和推广应用价值。
参考文献:
[1] 康慧芬,徐建,李晓静 . 一种新型高分子环保固沙剂的制备与 性能研究[J]. 石油化工应用,2018.37(7):106- 110.
[2] 钟帅,韩致文,李爱敏 .GS-3 生态固沙剂性能及其浓度对植物 生长的影响[J]. 农业工程学报,2018.34(24):107- 114.
[3] 刘辉,王玉伟,邹继颖 . 新型环保固沙剂的性能研究[J]. 吉林化 工学院学报,2020(1):77-80.
[4] 尹应武,孙瑞, 张雪艳 . 生物基磺酸盐在沙漠固沙、盐碱地改 良中的应用示范与推广[C]//. 中国治沙暨沙业学会 2018 年学 术年会,2018:138- 150.
[5] 李卫卫, 张伟伟,赵振智 . 一种多功能沙漠压沙种草机的设计 [J]. 汽车实用技术,2019(20):137- 138.
[6] 梁建平, 张文军, 万其号 . 固沙剂灌草种子喷播一体机研究设 计[J]. 林业和草原机械,2020(6):30-34.
[7] 赵淑红,顾志远,袁溢文 . 马铃薯曲面式播种开沟器仿生设计 与试验[J]. 农业机械报,2021.52(12):32-42.
[8] 李晓娜 . 播种机开沟器参数优化分析[J]. 设备管理与维修 , 2022(2):20-21.
[9] 胡婷,全伟, 吴明亮 . 双垄四行花生垄作播种机种沟开沟器设 计与试验[J]. 中国农业科技导报,2021.23(9):129- 137.
[10] 李保育,杨伟婷,王鑫 . 轻便式洒水车的设计及有限元分析[J]. 装备制造技术,2021(7):96-99.
[11] 常桥墩 . 小型草方格固沙机的设计[D]. 银川:宁夏大学,2021.
[12] 班景洋 . 悬挂式穴播播种机的改进设计[J]. 农业科技与装备, 2021(6):34-35.
[13] 王雷 . 开沟器的结构设计与有限元分析[J]. 农业机械,2020 (12):79-81.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58432.html