SCI论文(www.lunwensci.com)
摘要:自从新冠疫情爆发以来,服务机器人被广泛应用于疫情防控,做出了巨大贡献。目前市场上用于疫情防控的服务机器人大多 数是无人机、送餐服务机器人、消杀机器人和AGV,这些服务机器人单独使用,其效率低下,具有很大的局限性。综合上述服务 机器人的特性,将其有效结合在一起,组合成一个服务机器人系统,由分拣生产线、AGV、装货区、无人机、送餐机器人和消杀机 器人组成。在物资仓库里针对性地设计了分拣区和装货区以及无人机配送用的货架,使得整个配送过程无缝对接,进行无人化配 送,极大地提高了配送效率,特别是对于封控小区,可有效解决物资派送问题,为疫情防控提供一种新思路。
关键词:服务机器人,疫情防控,人工智能
Conception of a Service Robot System for Epidemic Prevention and Control
Chen Tingmu
( Fujian Special Equipment Inspection and Research Institute//National Quality Supervision and Inspection Center of Special Robot Product ( Fujian ),Quanzhou,Fujian 362000.China )
Abstract:Since the outbreak of COVID-19.service robots have been widely used in epidemic prevention and control,and have made great contributions.At present,most of the service robots used for epidemic prevention and control in the market are UAVs,meal delivery service robots,disinfection and sterilization robots and AGVs.These service robots are used alone,with low efficiency and great limitations.Based on the characteristics of the above service robots,combined them effectively,and a service robot system was formed.The system was composed of sorting production line,AGV,loading area,UAV,meal delivery robot and disinfection and sterilization robot.In the material warehouse,the sorting area,loading area and shelves for UAV distribution were designed to make the whole distribution process seamless and unmanned,which greatly improved the distribution efficiency.Especially for the sealed control community,the system could effectively solve the problem of material distribution and provide a new idea for epidemic prevention and control.
Key words:service robot;epidemic prevention and control;artificial intelligence
0 引言
自新冠疫情爆发以来,由于病毒的传染性极强,各 国政府升级抗疫措施,减少人与人之间接触和感染风险,对疫情防控工作带来了巨大的挑战,使用服务机器人可以有效地解决这一系列问题[1-3 ] 。目前常见的服务机器人 有送餐机器人、消杀机器人、无人机和AGV 等。送餐服 务机器人融合多种技术发展而来,其关键技术有智能动态避障、自主定位导航技术、底盘移动技术以及语音识别能力[4-6 ] 。消杀机器人替代人工从事消毒工作,其关键 技术在于移动机器人底盘上加装的消毒模块,消毒模块 主要包括紫外线灯、疝气灯、消毒药水喷嘴、空气过滤 等等[7]。无人机即无人驾驶飞机,是利用无线电遥控设 备和自备的程序控制装置操纵的不载人飞行器[8]。无人搬运车(AGV ) 主要由移动底盘、调度系统和红外探测 器等组成。调度系统是其大脑,会根据目标和AGV 当前的位置进行轨迹规划,以最快的方式完成搬运物质的要 求[9]。目前大多数学者只是单独研究某一类型的服务机器人系统,宋倩倩等[10] 研发了一种移动式医疗服务机器人,能够完成远程医药物品的输送;何佑星[11] 设计了一款家庭服务机器人自主导航系统;刘冠一等[12] 结合激光 雷达、底盘驱动、人机交互等功能模块,设计了一种室 内服务机器人路径导航系统。目前比较少学者将市场上 各种服务机器人有机结合使之成为一套新的服务机器人 系统。因此本文提出综合无人机、送餐机器人、消杀机 器人和AGV 等服务机器人的各自特点,将其有机结合, 组建成新的服务机器人系统,为疫情防控下物流不畅通 的问题提供一种新的解决思路。
1 服务机器人系统设计原理
虽然现在越来越多的服务机器人应用于疫情防控, 但是其效果并不是很理想,特别是目前某些城市疫情非 常严重,物流并没有打通,运力不够,小区全面封控后 对物价造成较大的波动,甚至是出现有钱买不到物品的 局面。为了解决这一问题,本文设计了一种服务机器人 系统,结合各个服务机器人的特点,将其数据打通,结 构有效衔接起来,使其形成一个有效的系统,理论上可 以很好地完成物资配送的任务。
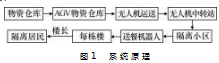
本系统由无人机、送餐机器人移动底盘、消杀机器 人和AGV 构成。生活物资运送到指定地点后,将生活物 质根据不同派送地址生成二维码,AGV 小车识别二维 码,将物资按照派送区域进行分拣,无人机将分拣好的 物资装货飞往隔离小区,如果隔离小区距离较远则采用 多个中转站的方式进行,最后送餐机器人将无人机运送 的物资送至隔离小区的每一栋楼下,由“楼长”将物资 进行分发。“楼长”由每一栋楼的居民选举产生,相当 于志愿者的身份,为本楼的居民服务,在隔离期间配合 疫情防控工作。系统原理如图1所示。
本系统难点之一在于AGV 将分拣好的物质运到指定 地点后,无人机能实现无人化将物质装货与卸货。目前 市面上大部分无人机派送方案都是需要人为地装货,然 后再操作无人机飞往指定地点,最后还得在目的地人为 地卸货,如图2所示。这种派送方式又无形中增加了人 力资源,为了减少人为操作,本系统设计了一个货架, 货架最大承载能力为20 kg,其四周带有倒钩,无人机底 架可与倒钩相挂,具体为操作无人机降至货架上表面, 然后操作无人机稍微向左边移动,最后操作无人机向上 即可与货架倒钩相挂,然后即可运往目的地,到达目的 地后,卸货的操作与之相反,货架示意图如图3 所示, 此种设计通过机械结构的刚性连接,相比于吸盘更为可 靠,较大程度地实现了装货和卸货的无人化。
2 服务机器人系统的重要组成
本系统由AGV、无人机、送餐机器人移动底盘和消 杀机器人等硬件以及物资仓库的分拣区和装货区构成。
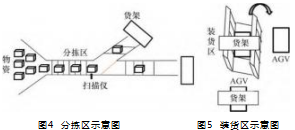
物资分拣部分。物资仓库的分拣区其功能为将物资 按照不同派送地址进行分拣,如图4所示。其原理为先 将物资四周贴上一个二维码,每个二维码对应一个地区 或者小区,将货物放在生产线上,生产线上放置一个扫 描仪,扫描仪扫描货物上的二维码,例如当识别到A 小 区时,挡块向上,则货物往上运送至货架;当识别到B 小区时,挡块向下,则货物向右运送至货架,可以在每 个支线上放置一扫描仪,可实现将货物细分到每一个小 区。通过此种方式可有效地将物资详细切割成一个一个小区,然后将一个一个小区的物质分拣好,放在统一的 货架上。
物资装货部分。AGV 主要目的是将分拣好的货物, 运到指定位置即无人机起飞点。为实现自动装货,本文 设计了一个装货区,如图5所示。在物资仓库内,分拣 生产线将物资按小区分拣好后,将物资放在货架上,货 架满后,AGV 调度系统将指令给到AGV 小车,空闲的 AGV 小车会根据自己的位置进行轨迹规划,以最快的方 式到达分拣产线的末端,也即货架的位置上,然后将货 架运到装货区进行装货。AGV 小车台面可自主升降,装 货区有一凹槽,刚好可供AGV 小车通过,而货架比凹槽 宽,AGV 到达凹槽后,将其台面下降,于是可以将货架 放在装货区上。
无人机配送部分。物资仓库应设置在距离隔离小 区相对近的位置,因为无人机目前的飞行半径大多数 为3 km,如果距离太远超过无人机的飞行半径,要想增 加飞行半径就得增加无人机中转站。所谓的无人机中转 站就是无人机每飞行3km,就落地停靠,换充满电的电 池,然后接着飞。通过这种堆叠的方式可有效增加无人 机的飞行半径。为提高运送效率,所有物资按照地点进 行分拣,最好按照小区进行分拣,将分拣好的物质放在 货架上,AGV 小车将货架放在装货区上,工作人员操作 无人机使无人机脚架部分与货架的倒钩相挂,然后按照 点到点的方式直接飞往指定小区。每个小区都有对应的 无人机编队进行派送物资,可根据需要派送的物资量合 理增加无人机架次,如果距离目标小区较远,可通过设 置无人机中转站的方式实现派送,在无人机中转站放置 型号相同的无人机电池,待无人机编队到达后更换电池 即可继续执行派送任务。如果距离更远也可通过此种方 式进行堆叠,实现派送范围的增大。
送餐机器人配送部分。本文送餐机器人只保留其移动底盘,这样无人机的货架可直接放在其上面,不用人为卸货,如图6 所示。在每个小区花园处设置物资放置点,物质放置点放有送餐机器人。无人机直接将物 资放置在送餐机器人上,机器人将物资运送至每一楼前台处。
消杀机器人消杀部分和楼长物资分配部分。此部分 为服务机器人系统的最后一个环节,在这一个环节中需 要配备一名工作人员进行物资分配工作,此工作由楼长 完成。送餐机器人将物资运送至每一楼前台处,由楼 长将货架拿下,放在消杀机器人工作区域进行消杀工 作,消杀机器人对物资进行全面消杀,防止运送过程 中的病毒感染,待消杀完后由楼长将物资派发给每一 户居民。
3 服务机器人系统验证与结果分析
为了验证此套系统的可操作性以及其效果,进行了 人机对比试验。将模拟小区封控,在此环境下,人工运 送物质和服务机器人系统运送物质的效率进行对比,具体如下。
( 1 ) 试验方案设计。本次试验人工运送物质队和服务机器人运送物质队两队进行对比,分别将20 kg 的大 米运送至同一指定小区C5 栋,分别记录两队的时间和人 力配置。人工队由一人配上一电动自行车组成;服务机 器人系统由无人机(大疆植保无人机T40 改装),送餐 机器人移动底盘(九号机器人RMP Lite 400 ) 组成和一人组成。
(2 ) 试验过程。本次试验物资距离指定小区某一楼层直线距离1.8 km,骑行距离用百度导航为2.4 km,期 间经过2个红绿灯。人工队在到达物资点开始计时,其 装好物资以电动自行车最大速度25 km/h 速度前往指定 小区,到达指定小区门口用时为466 s,然后将物资拿到 C5 栋,门口距离C5 栋120 m,人工手提两袋大米跑步前 往C5 栋用时154 s,因此人工队总共用时620 s。服务机 器人系统到达指定物资点(也即装货区)后开始计时,操作员操作无人机进行装货,而后以点到点的方式直线距离飞往指定小区,飞行速度为7 m/s,321 s 后降落于小区花园的送餐机器人上,距离门口20 m,送餐机器人 以1.2 m/s 的速度将物资送往C5 栋,到达时用时21 s,因此服务机器人系统总共用时342 s。
( 3 ) 结果分析。此次试验没有从分拣流程开始计时,因为单独分拣两包大米在时间上人工和分拣线用时 差不多,意义也不大,但是对于大批货物的话,按小区 分拣机会提高配送效率。从此次试验可以看到服务机器 人系统派送物资用时比人工队要快278 s。服务机器人系 统运送物质可做到无缝链接,可极大地缩短派送时间, 而且除物资仓库需要配置一个操作人员外可无人化进行 配送。特别是对于疫情严重的地方,运力不足的情况下, 可有效缓解物质配送和人员交叉感染这一问题。
此系统综合应用了AGV 小车、无人机、送餐机器人 和消杀机器人的特点,有效结合其功能,可为由疫情封 控小区运送必要的生活物资。特别是近期上海疫情严重 程度超过大家的预期,封城后,居民的生活物资成了非常大的难题。由于运力不足,人工不够,造成短期市场 物价的不合理上涨。目前为止,各大物流公司还是组织 人力运送货物,特别是媒体报道京东组织所谓的“敢死 队”进入上海,由此可知,其运力是多么欠缺。此系统 的运用可有效缓解运力不足的问题,同时可以很好地避 免疫情人为传播的风险。
4 结束语
本文结合上海疫情防控出现的问题提出一种疫情防 控用服务机器人系统,这一系统充分利用现有服务机器 人的功能特点,将其有机组合,使其配送无缝对接,大 幅减少配送时间。原理简单、可操作性强,理论上可大 幅缓解运力不足的问题,为疫情防控提供一种新思路。
主要创新点如下。
( 1 ) 本文设计了分拣产线,根据物资派送的区域或者小区进行分拣,为后面的物质配送提高效率。
( 2 ) 本文根据无人机的脚架尺寸设计了与之匹配的货架,使得无人机装货与卸货无人化。
( 3 ) 在物资仓库内合理设计了一个装货区,AGV 小车将分拣好的物资快速地运到装货区,无人机在此进行 无人配送。
参考文献:
[ 1 ] 管浩.后疫情时代,服务型机器人或将迎来发展黄金期? [ J ].华东科技,2020 (6 ):46-48.
[ 2 ] 李少强,刘浩,郭文亮,等.智能机器人在新冠肺炎疫情期间 的应用探索[J].中国感染控制杂志,2021.20 (3 ):283-288.
[3]服务型机器人产业的发展现况与突破方向[J].大数据时代, 2021 (7 ):15-21.
[4 ] 编辑部.艾吉威第一代送餐机器人问世[J].物流技术与应 用,2020.25 (3 ):157.
[5]刘彩霞,顾帅,杨正涛.校园送餐机器人控制系统的设计[J]. 制造业自动化,2021.43 ( 1 ):93-95.
[ 6 ] 宗雅文.智慧餐饮背景下送餐机器人体验设计研究[D].上 海:华东理工大学,2019.
[7 ] 熊安迪.消毒配送机器人:以钢铁之躯阻断病毒传输通道 [ J ].机器人产业,2020 (2 ):41-45.
[8]闫妍,刘雅迪.无人机技术在物流配送环节的优化研究[J]. 中国储运,2022 (4 ):132-133.
[ 9 ] 贾新鹏,袁锋伟,黄贞普.自动导引小车(AGV ) 车架结构设计 与仿真分析[J ].机电工程技术,2022.51 (3 ):192-196.
[10]宋倩倩,李晓彤.移动式医疗服务机器人系统设计[J].电子 制作,2021 ( 16 ):33-35.
[ 11 ] 何佑星.多传感器融合的家庭服务机器人导航系统的设计 与实现[D ].兰州:兰州理工大学,2021.
[ 12 ] 刘冠一,窦水海,杜艳平,等.室内服务机器人路径导航系统 设计及算法[J].科学技术与工程,2020.20 (34 ):14114-14119.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58361.html