SCI论文(www.lunwensci.com)
摘要:浮式系船柱作为船舶过闸的系缆设备被广泛应用, 但由于船舶系缆程序不规范、船舶吨位增大导致系缆力超载等问题, 导 致浮式系船柱卡阻或升降迟缓, 带来严重的安全隐患。提出基于激光测距和离群点检测的浮式系船柱运行状态检测方法, 利用激 光测距技术实时获取浮式系船柱的高程, 融合 K-means 聚类算法和 IQR 四分位算法对所有浮式系船柱高程数据点进行离群点检测, 以确定浮式系船柱是否存在运动卡阻等问题。构建基于串口服务器的高程实时采集硬件电路, 采用 Qt 平台开发高程数据采集和系 船柱状态分析上位机软件, 实现浮式系船柱运行状态的自动检测与预警。现场测试结果表明: 系统在室外环境中运行平稳可靠, 能够实时采集浮式系船柱的高程并完成分析, 通过人机交互界面进行显示, 为浮式系船柱运行状态实时检测提供了实用可行的方法。
关键词:浮式系船柱,自动检测,离群点检测,K-means 聚类,四分位法
Research on Detection Method for the Operating Status of Floating Bollards of Ship Locks
Hang Zhen1. Peng Hao2. Cao Wenzhuo3. Wang Huaming3
( 1. Development Center of Taizhou Port and Channel, Taizhou Jiangsu 225309. China;
2. Department of Zhousanhe Shiplock Management, Taizhou Jiangsu 225300. China;
3. College of Mechanical and Electrical Engineering, Nanjing University of Aero. and Astro., Nanjing 210016. China)
Abstract: Floating bollards are widely used as the mooring equipment for ships passing through ship locks, but there are problems such as non-standard mooring and overload of mooring force due to the overlarge tonnage of ships during the mooring process, which could cause floating bollards to be stuck or slow movement, and lead to potential safety risks. The detection method for the operating status of floating bollards based on the laser distance measuring technology and Outlier detection was proposed, which used the laser distance measuring technology to get positions of bollards, and then K-means clustering algorithm and IQR algorithm were combined to determine if there were problems such as being stuck by detecting the outliers in positions. The position acquisition hardware circuit was constructed based on serial port server, and the host software with functions like position acquisition and status analysis of bollards was developed based on Qt platform, therefore the automatic detection for the operating status of floating bollards was realized . Onsite experiments show the system operates stably, and the real-time collecting and analysis on the position data of floating bollards was achieved .The results is shown on the interface, which provides an applicable method for the real-time detection of the operating status of floating bollards .
Key words: floating bollard; automatic monitoring; outlier detection; K-means clustering; interquartile range algorithm
0 引言
内河航运在交通运输系统中扮演着重要角色, 是交 通运输系统中不可或缺的部分。在内河航运中, 船闸作 为联通不连续航道水域的通航建筑物, 被广泛用于沟通 水系联系、提高航道等级、改善水流条件等场景, 极大 地促进了内河航运的发展。船舶在闸室内停靠时主要依 靠浮式系船柱, 其导轮随水位的升降沿导槽滚动, 因此 系船柱在浮力作用下随水位变化上下浮动, 满足船舶在 闸室内安全系缆的要求[1]。
浮式 系 船 柱 作 为 一 种 常 见 的 船 舶 过 闸 系 缆 设 备,使用频率高, 在实际使用中可能会出现卡阻或升降迟 缓等问题, 导致出现吊船、拉船入水、船舶损伤甚至 船员伤亡等安全事故, 带来严重的安全隐患, 主要原 因是[2]:
( 1 ) 系缆力增大和系缆不规范。船舶大型化的快速 发展使过闸船舶的吨位和尺寸逐年增大, 超过系船柱设 计标准, 系缆力随之增大, 对通航设施提出更高的要求。 在系缆过程中存在船速过快、系缆不规范等现象, 导致 系船柱的横向导轮支架产生较大的变形, 造成系船柱运 动卡阻。
( 2) 滚轮衬套密封措施差。水中泥沙等杂质进入导 轮衬套与转轴的缝隙中, 容易造成导轮衬套与转轴间的 磨损或卡死, 影响其使用寿命。此外河水中的酸碱成分 也会造成导轮及转轴的锈蚀, 影响其转动, 增大了运行 阻力, 导致系船柱升降迟缓。
为分析浮式系船柱的运行状态, 近年来有学者开展 系 船 柱 表 面 应 变 、 系 缆 力 的 分 析 与 检 测 等 方 面 的 研 究[3-4], 将系船柱所受系缆力与预警阈值进行比较, 实现 对系船柱的系缆安全评估。实际系船柱在工作过程中受 力和应变情况复杂, 与系缆角度、方向及位置等因素都 相关, 系船柱的工作状态还受到其导轮运转状态等因素 的影响, 因此, 可通过直接检测系船柱的高程及高程数 据点的分析判断系船柱是否存在卡阻、升降迟缓等问题。
为直接获得浮式系船柱的工作高程并进行其运行状 态的检测, 构建浮式系船柱运行状态自动检测系统, 通 过激光测距技术获取所有系船柱的高程[5], 融合机器学 习算法和统计学方法分析数据中的离群点, 实现系船柱 运行状态的分析, 保障船闸及系船柱的安全运行。
1 系船柱运行状态检测系统设计
1.1 系统组成及工作原理
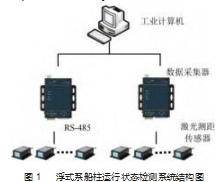
浮式系船柱运行状态检测系统硬件电路结构如图 1 所示, 主要由激光测距传感器、数据采集器和工业计算 机 (上位机) 3 个部分组成。
激光测距传感器用于获取传感器与每个系船柱浮筒 之间的距离。根据船闸系船柱的实际工作范围和工作环 境, 确定激光测距传感器性能参数为: 测量范围为 0~ 10 m, 精度±1 mm, RS485 串口输出, IP67 防护等级。
为防止现场干扰, 保证数据的实时采集与传输, 通 过多种数据采集传输方案的实际测试对比, 确定采用基 于串口服务器的数据采集方案, 其具有将串口信息转换 为以太网网口信息的功能[6], 实现 RS485 串口与 TCP/IP 协议网络接口的数据双向透明传输。所有激光测距传感 器通过 485 总线与串口服务器的输入 485 串口连接, 每个 传感器拥有唯一的 Modbus 地址, 按编号进行排列[7]。串口服务器通过 Modbus RTU 通信协议定时采集传感器数 据, 将数据放置在存储区域, 将串口信息转换为以太网 信息。
工业计算机通过以太网网口, 基于 Modbus TCP 通信 协议从串口服务器的存储区域获取数据, 计算得到浮式 系船柱的高程, 应用离群点检测算法判断各系船柱的运 行状态, 将采集的数据和运行状态存入数据库中。
1.2 浮式系船柱高程的计算
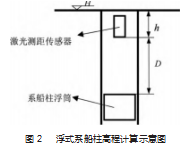
激光测距传感器具有精度高、测距范围大、响应速 度适中等优点, 采用激光测距技术可实时获取浮筒与传 感器的精确距离。为测得传感器与系船柱浮筒之间的垂 直距离, 需要对传感器的安装姿态进行校准。图 2 所示 为浮式系船柱的高程计算示意图, 激光测距传感器安装 于系船柱浮筒的正上方, 其中: 闸室墙面的顶高程为 H、 传感器与闸室顶面的高度差为 h, 得到传感器的安装高 程 H - h。由浮筒与传感器的距离 D 得到浮筒的高程为 H - h - D。
2 高程的离群点检测算法
当所有浮式系船柱运行状态正常时, 其高程数据点 之间的距离较小。当个别系船柱出现卡阻、运动迟缓时, 则会出现个别数据点偏离绝大多数数据点的现象, 即为 离群点[8]。因此, 可以采用离群点检测的方法进行浮式 系船柱运行状态的检测。
离群点检测的方法主要有基于聚类的检测方法、基 于统计学的检测方法、基于近邻的检测方法等, 为提高 离群点检测的正确性, 融合运用基于聚类和基于统计学 的检测方法综合判断系船柱的运行状态。
2.1 基于 K-means 聚类算法的离群点检测
聚类算法是数据挖掘的重要算法[9], 其中 K-means 聚类算法是基于距离的聚类算法[10- 11], 该算法采用距离 作为相似性的评价指标, 即认为两个数据点的距离越近, 其相似度就越大。该算法认为簇是由距离靠近的数据点 组成, 因此把得到紧凑且独立的簇作为最终目标。 K- means 聚类算法采用迭代求解的分析方法, 其步骤是随 机选取 k 个数据点作为初始聚类中心, 然后计算其它每 个数据点与各个聚类中心的距离, 再把每个数据点分配给距离最近的初始聚类中心。采用 K-means 聚类算法检 测系船柱高程离群点的实现步骤如下所述。
步骤 1: 算法参数初始化, 设置聚类簇数 k、系船柱 浮筒高程数据集 X = {x 1 ,x2 , ⋯,xn }。
步骤 2: 从数据集中随机选取 k 个数据点作为初始聚 类中心 C = {c 1 ,c2 , ⋯,ck }。
步骤 3: 计算数据集 X中所有数据点到各个聚类中心 C 的距离, 即
d (xi ,cj ) = |xi - cj |
式中: i = 1. 2. ⋯,n 且j = 1. 2. ⋯,k。
对于任意数据点 xi, 如果 d(xi ,cj )为最小距离值, 则将数据点 xi 归入聚类中心 cj 所代表的簇 Sj。
步骤 4: 根据每个簇中的数据, 以它们的平均向量 作为新的聚类中心。
步骤 5: 重复步骤 3 和步骤 4. 直至聚类中心不再移动, 即每个簇中的数据点不发生变化, 得到最终聚类中 心 C′ = {c,c, ⋯,c}和簇 S′ = {S,S , ⋯,S}。
步骤 6: 由聚类中心{c,c, ⋯,c}计算距离矩阵, 即
■d 11 d 12 ⋯ d 1k ■(2)
■dk 1 dk2 ⋯ dkk ■
式中: dij = | ci ′ - cj' |, i,j = 1. 2. ⋯,k。
步骤 7: 由距离矩阵计算离群因子, 即
k dij × count (Sj')
δ i = n
式中: i = 1. 2. ⋯,k, δ i 表示第 i 个聚类中心对应的离群因 子, count (Sj')表示簇 Sj' 中元素的个数。
步骤 8: 对离群因子进行排序, 计算中位值 δmid 和标 准值 δstd, 即
■δ mid = ■■■■(■■■)1))2δ(k
1(为)奇 k(数)为偶数 ( 4)
步骤 9: 计算离群因子阈值 thresh = δ mid + 1.5δ std。当 离群因子大于该阈值时, 则该簇中的点为离群点。
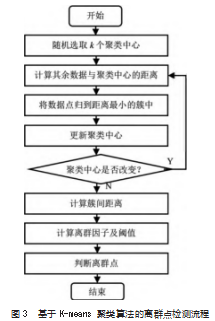
设聚类中心数 k = 3. 将系船柱浮筒高程数据分为偏 大簇、正常簇和偏小簇, 其具体算法流程如图 3所示。 2.2 基于四分位算法的离群点检测四分位算法 (interquartile range, IQR) [12-13]是一种基于统计学原理的离群点分析方法, 利用箱型图的四分 位距对离群点进行检测, 方法如下:
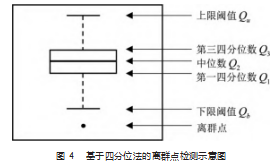
( 1) 数据排列。对于计算得到的一组系船柱浮筒高 程, 首先将数据从小到大排列, 排列在前 14位置上的 数即为第一四分位数, 记作 Q 1; 排列在前 12位置上的 数即为中位数, 记作 Q2; 排列在前 34位置上的数即为 第三四分位数, 记作 Q3.
( 2) 四分位距计算。计算第三四分位数与第一四分 位数的差值, 即 IQR = Q3 - Q 1.
( 3) 离群 点 判 断 。 以 四 分 位 距 的 1.5 倍 为 标 准, 规 定 上 限 阈 值 Qu 为 第 三 四 分 位 数 加 1.5 倍 的 四 分 位 距, 下 限 阈 值 Qb 为 第 一 四 分 位 数 减 1.5 倍 的 四 分 位 距。高于上限阈值 Qu 或低于下限阈值 Qb 的数据点认 为是离群点。
2.3 离群点检测方法融合
使用单一的离群点检测算法具有局限性, 容易产生 误检或漏检, 结合 K-means 聚类算法和 IQR 四分位算法 得到的离群点检测结果[14], 融合两种方法进行系船柱高 程离群点的判断, 方法如下:
( 1) 当两种方法的检测结果一致时, 则认为该数据 点正常或为离群点;
( 2) 当 IQR检测为异常值而 K-means检测为正常值, 说明此时整体数据波动较大, 设为警戒值;
( 3) 当 IQR检测为正常值而 K-means检测为异常值, 说明此时数据分布在小范围内, 且分布较为集中, 设为 正常值。
图 4所示为基于四分位法的离群点检测示意图
3 系统构建与测试
3.1 系统构建与数据采集
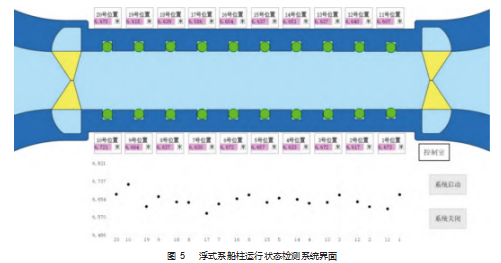
以国内某船闸为研究对象构建该检测系统, 该船闸 共有 20个浮式系船柱。在每个系船柱正上方固定安装激 光测距传感器, 所有传感器通过 485 总线连接至串口服 务器, 串口服务器与工控机通过网口连接并安装于闸首 的机房内。基于 Qt 平台开发集成有数据采集和离群点检 测功能的系统软件[15], 软件界面如图 5 所示。
系统现场测试表明, 工业计算机从串口服务器读取 一次数据的时间为 10 ms, 轮询 20个地址总用时 200 ms, 离群点检测算法推理用时 1 ms, 因此系统能够在 1 s 内采 集浮式系船柱高程并完成分析, 满足浮式系船柱运行状 态实时检测的需求。
3.2 离群点分析
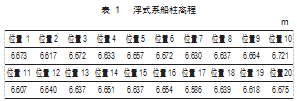
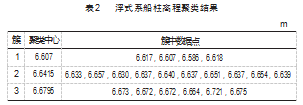
表 1所示为某时刻的一组浮式系船柱高程, 可以看出此时数据分布较为集中, 闸室内处于高水位。使用 K- means 聚类算法初始化聚类簇数 k = 3. 数据点数 n = 20. 得到如表 2 所示聚类结果。
由式 (2)、( 3) 计算距离矩阵和离群因子, 得
「 0 0.034 5 0.038 ■
δ 1 = 0.018 3. δ 2 = 0.039. δ 3 = 0.033 5
对离群因子进行排序后得中位值 δmid = 0.033 5. 标 准 值 δ std = 0.010 7. 计 算 得 离 群 点 判 定 阈 值 thresh = 0.049 6.因此, 由 K-means 算法得到所有数据点正常。
其次, 使用 IQR 四分位算法进行检测, 第一四分位 数 Q 1 = 6.631 5. 第三四分位数 Q3 = 6.668. 则四分位距 IQR = 0.036 5. 上 限 阈 值 Qu = 6.723. 下 限 阈 值 Qb = 6.577.所有数据点均处在上限阈值和下限阈值之间, 因 此由 IQR 四分位算法认为所有数据点正常。
对两种算法的结果进行融合, 因两种方法均检测为 正常数据, 最终确定此时所有浮式系船柱运行正常。图 5 所示为当前时刻系船柱的状态和高程, 分别以高程和 数据点的形式显示, 所有系船柱均显示为绿色, 表明其 均工作在正常状态。
4 结束语
本文设计并构建了船闸浮式系船柱运行状态检测系 统, 该系统通过串口服务器和激光测距传感器实时获取系船柱的高程, 融合 K-means 聚类算法和 IQR 四分位算 法对所有系船柱高程进行数据离群点检测, 得到系船柱 的运行状态。现场测试表明, 该系统运行平稳, 能在 1s 内完成船闸所有浮式系船柱高程的实时采集、离群点分 析和数据存储, 满足浮式系船柱运行状态实时检测的需 求, 也为系船柱的运行状态变化分析及结构改进设计提 供了客观数据。该系统采用系船柱高程离群点检测的方 法, 包含浮式系船柱的受力状况及导轮等装置的运转状 态, 为系船柱运行状态检测提供了新方法, 具有推广应 用价值。
参考文献:
[1] 余梦,张琼,卢小凤,等 . 浮式系船柱在船闸工程中的施工应用 [J].安徽建筑,2018.24(03):261-263.
[2] 张虎,尹斌勇 .船闸新型浮式系船柱的设计与应用[J].人民长 江,2019.50(09):137-140.
[3] 刘明维,曾丽琴,齐俊麟,等 .船闸浮式系船柱受力状态数值模 拟[J]. 水运工程,2020(12):112-117.
[4] 刘明维,李明龙,吴林键,等 .船闸浮式系船柱受荷响应力学模 型[J].重庆交通大学学报,2022.41(5):127-132.
[5] 胡永建,孙成芹,韩昊辰,等 .基于激光测距仪和开源硬件的井 深测量系统设计[J].机电工程技术,2018.47(4):1-3.
[6] 陆庆志 ,聂 雄 . 基于 ENC28J60 的串口服务器设计[J]. 仪表技术,2021.(4):23-26.
[7] 程凤霞 .基于 RS-485 总线的采掘设备监测系统设计[J]. 煤矿 机电,2020.41( 4): 16-18.
[8] 周玉,朱文豪,房倩,等 .基于聚类的离群点检测方法研究综述 [J].2021.计算机工程与应用,57(12):37-45.
[9] 马福军,胡力勤 . 密度峰值聚类算法在管廊大数据挖掘中应用 [J].机电工程技术,2022.51(2):94-97.
[10] 蒋华,季丰,王慧娇,等 . 改进 Kmeans 算法的海洋数据异常检 测[J].计算机工程与设计,2018.39(10):3132-3136.
[11] 韩帅,孙乐平,杨艺云,等 .基于改进 K-Means 聚类和误差反馈的数据清洗方法[J]. 电网与清洁能源,2020.36 (07): 9-15.
[12] 赵永宁,叶林,朱倩雯 .风电场弃风异常数据簇的特征及处理 方法[J]. 电力系统自动化,2014.38(21): 39-46.
[13] 武佳卉,邵振国,杨少华,等 .数据清洗在新能源功率预测中的 研究综述和展望[J]. 电气技术,2020.21 (11): 1-6.
[14] 张自嘉,张丽萍,花晓蕾 .基于 ARM 的雷电三维电场数据采集 系统的设计[J].仪表技术与传感器,2015.(03): 47-49.
[15] 赵天辉,张 耀,王建学 .基于空间密度聚类和异常数据域的负 荷异常值识别方法[J].2021.45(10): 97-105.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/57364.html