SCI论文(www.lunwensci.com)
摘要:为了准确反映出柔性翼肋在飞行过程中的变形情况, 提出了一种基于神经网络技术的柔性变体翼肋主动变形自感知方法。 参照 BP 神经网络模型搭建神经网络结构, 然后选取 Leaky ReLU 作为神经元激活函数 。通过有限元软件仿真得到柔性翼肋上选定 点处的应力数据和整个柔性翼肋的位移数据, 然后将得到的数据划分为训练集 、验证集和测试集 。选取神经网络在训练过程中需 要的 Adam 学习算法和 drop out 过拟合抑制方法, 然后用训练集上的数据对已搭建好的神经网络进行训练 。训练完成后的神经网络 经过验证集数据的验证, 不存在明显的过拟合现象, 可以用于柔性翼肋变形的自感知 。利用测试集上的数据评价所提出的方法的自感知精度, 该方法能够在使用较少应变传感器的情况下达到足够的自感知效果。
关键词 :神经网络,变体飞机,柔性翼肋
Research on Self-sensing Method of Flexible Rib Deformation Based on Neural Network
Liu Dingjia, Yang Rui
(School of Mechanical Engineering, Dalian University of Technology, Dalian, Liaoning 116024. China)
Abstract: In order to accurately reflect the deformation of the flexible wing rib during flight, a self-sensing method of active deformation offlexible wing rib based on neural network technology was proposed . The neural network structure was built with reference to the BP neuralnetwork model, and then Leaky ReLU was selected as the neuron activation function . The stress data at selected points on the flexible rib andthe displacement data of the entire flexible rib were obtained through finite element software simulation , and then the obtained data weredivided into training set, validation set and test set. The Adam learning algorithm and drop out overfitting suppression method required in thetraining process of the neural network were selected, and then the data on the training set to train the built neural network was used . Aftertraining, the neural network was verified by the validation set data, and there was no obvious over-fitting phenomenon, which could be used forthe self-perception of the deformation of the flexible rib . The data on the test set is used to evaluate the self-sensing accuracy of the proposedmethod, which can achieve sufficient self-sensing effect with less strain sensors .
Key words: neural network; variant aircraft; flexible wing rib
0 引言
新一代柔性变体机翼是一种能够依据飞行器的工况, 对气动外形进行自动变形调整的新型机翼, 这种机翼可 以显著地提高飞行器的飞行性能[1] 。其中, 采用了柔性 翼肋的变弯度机翼是其中的重要研究方向 。在飞行器的 飞行过程中, 这种柔性翼肋的变形情况会受到驱动载荷 和气动载荷的耦合作用影响 。为了对这种采用了柔性翼 肋的变弯度变体机翼进行控制, 就需要准确实时地感知 柔性翼肋在耦合作用下的形变情况[2]。
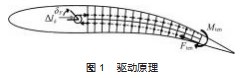
本文以一种基于 NACA0012 对称翼型的鱼骨状的柔 性翼肋作为研究对象 。这种柔性翼肋由刚性的前缘部分 和柔性后缘结构组成, 其中的柔性结构由一根细长的弦 向弯曲中梁和分叉的桁条作为支撑结构, 支撑结构被固 定到蒙皮上承载气动压力, 其中的蒙皮结构采用了弹性复合材料来消除变形时出现的翘曲 。该柔性翼肋可以在 飞行攻角-5° ~ 5°, 飞行速度 0 ~ 100 m/s 的情况下工作 。 该柔性翼肋利用驱动系统将驱动力加载在柔性后缘的末 端结构上进行主动变形, 其驱动系统主要由高刚度的拉 索和翼肋前端带有机械制动装置的缠绕滑轮组成, 工作 时, 电机使得缠绕滑轮旋转并带动拉索拉动柔性翼肋 末端使得柔性翼肋产生弯曲变形 。其驱动力大小在 0 ~ 400 N 之间可调, 驱动力加载方式如图 1 所示[3]。
目前的研究中, 对柔性变体翼肋进行自感知的方法 主要有两类 。一类是通过外部测量仪器检测点或者面的空间位移从而计算变形; 另一类则是通过应变片或光栅 应变传感器检测结构应变从而反求变形 。第一类方法中, 较为典型的有李小路[4]等采用的激光测量法和韩涛等[5]采 用的视觉测量方法, 这两种方法分别采用了激光传感器 和双目摄像头检测了机翼上散斑点的空间位移来进行变 形计算。
而对于第二类方法, 也有许多学者进行了研究 。其 中 Tessler 等[6]基于最小二乘法提出了一种变形反求方法, 该方法通过考虑结构的力学特性可以将三维板壳的表面 应变场转换为位移场 。Foss 等[7] 基于应变模态和位移模 态之间的关系提出了一种结构变形重构方法, 该方法通 过应变-位移转换矩阵将测得的的应变数据转换为位移 数据从而反求变形 。KO 等[8]基于材料力学中的经典梁理 论提出了 KO 变形反求方法, 该方法通过应变与挠度的 微分方程关系将测得的应变转化为挠度来反求变形 。于 惠勇等[9]则提出了一种利用光纤的变形重构方法, 该方 法利用布拉格光栅传感器获取的应变和曲率信息通过递 推反求出变形情况。
然而, 上述的两类方法均存在一定的问题: 第一类 方法中的需要测量仪器, 这些仪器暴露在外接环境中, 工作环境恶劣且易受到天气情况的干扰; 第二类方法中 则需要在蒙皮等位置上加装较多应变传感器, 这会导致 系统质量较大且可能不适用于柔性蒙皮等新型蒙皮 。为 了克服上述问题, 本文提出了一种基于神经网络技术的 柔性翼肋变形自感知方法, 该方法可以同时综合利用由 应变传感器提供的应变数据和已知的驱动力数据对柔性 变体翼肋的变形进行自感知 。本文提出的柔性翼肋变形 自感知方法的工作过程包括两步: 首先将柔性变体翼肋 上粘贴的应变片采集到的结构应变数据和已知的驱动力 数据利用神经网络进行处理, 输出变体翼肋上下表面几 个选定位移测量点竖直方向上的空间位移 。然后利用变 体翼肋上下表面几个选定位移测量点通过拟合的方法对 柔性翼肋的变形进行自感知。
经过测试, 本文在在柔性变体翼肋的上下表面及后 缘处选择了 7个选定位移测量点来拟合柔性翼肋变形, 在柔性变体翼肋弦向弯曲中梁上均匀选择了 3 个位置粘 贴应变片采集结构应变数据, 选定位移测量点的位置如 图 2 所示。
本文对提出的柔性翼肋变形自感知方法的应用步骤 进行详细说明, 其应用步骤主要分为神经网络搭建, 数 据集采集, 神经网络训练和自感知效果评价 4 个部分。
1 神经网络搭建
在应用本文提出的柔性翼肋变形自感知方法时, 首 先需要搭建一个能够结构应变数据和已知的驱动力数据 并输出选定位移测量点的空间位移的神经网络, 该步骤 主要包含两步: 确定神经网络拓扑结构和确定神经网络 激活函数。
由于 BP (Back Propagation) 神经网络模型搭建方便 且在处理这类关系映射领问题时有优秀的效果, 本文选 用该种网络拓扑结构来进行柔性翼肋变形自感知。
神经网络的输入数据由 3 个接触式应变传感器得到 的应力数据和已知的驱动力数据组成, 而所需要的输出 数据则是 7个选定测量点的位移数据, 本文首先试着搭 建了一个包含 4 个输入神经元和 7 个输出神经元的神经网 络进行测试 。但在对试着搭建的神经网络进行训练时发 现: 由于输出层神经元数量较多, 为了达到可用的输出 精度, 该神经网络所需要的隐含层神经元数目过多, 这 就造成了该神经网络所需的储存空间较大且训练时间较 长 。因此, 根据分析试验, 为了在满足精度要求的情况 下尽可能缩小神经网络的规模, 本文中对于每一个选定 测量点单独建立一个神经网络 。最终, 为了输出 7 个选 定测量点的位移, 本文将搭建 7 个具有相同的输入层与 输出层结构的神经网络, 该批神经网络均包含的 4 个输 入神经元和 1 个输出层神经元。
在确定了输入层与输出层拓扑结构后, 就需要确定 隐含层拓扑结构即隐含层层数, 神经元数量来完成整个 神经网络拓扑结构的确定 。其方式主要有剪枝算法 、构 造算法, 交叉验证法以及试凑法等 。其中, 剪枝算法已 经在上章中进行了详细阐述 。构造算法与剪枝算法相反, 是一种自下而上的算法, 它以一个具有较小拓扑结构的 初始网络为基础, 通过逐一添加新的隐含层神经元单元 最终得到所需的神经网络拓扑结构 。交叉验证法是一种 穷举搜索算法, 它利用分割后的小部分数据集不断对各 种神经网络拓扑结构进行测试直到得到最优的神经网络 拓扑结构 。而试凑法则是以一种粗糙的神经网络拓扑结 构确定方法, 该方法通过参考处理类似问题的神经网络 拓扑结构通过试错的方法简单的进行几轮迭代试算, 最 终选出一种能够符合预期效果的神经网络拓扑结构, 其 含有 3 个隐含层, 每层有 30 个神经元。
在确定了神经网络拓扑结构后, 还需要确定神经元 的激活函数 。虽然在现代神经网络中, 普遍采用了 ReLU 函数作为激活函数, 但是其也存在一些严重的问题 。当 采用了 ReLU 函数的神经元输入为负值的时候, ReLU 激 活函数的梯度为零 。在这种情况下, 应用该激活函数的 神经元权重无法得到更新或者也可以说该神经元将永远 不再在任何的输入数据点上激活, 这种情况也被称为神经元“死亡”。为了避免该种情况的发生, 本文中将采用 其 改 进 型 Leaky ReLU 函 数 作 为 隐 含 层 激 活 函 数[10]。 Leaky ReLU 的函数表达式如下所示:
2 数据集采集
在建立了神经网络模型后, 就需要利用仿真, 获取 数据集训练神经网络以及最终评价这种柔性翼肋变形自 感知方法。
柔性翼肋的变形会同时受到驱动载荷和气动载荷的 影响 。为了对其变形情况进行研究, 本文将选取一些工 况, 借助有限元软件对其进行仿真分析 。首先, 对该柔 性翼肋进行建模并利用有限元软件模拟出该柔性变体翼 肋在工作区间内不同工况下受到的气动载荷, 然后将气 动载荷与已知的驱动载荷一起加载到柔性翼肋结构上, 就能够得到 7个选定位移测量点的位移数据以及弦向弯 曲中梁上 3个应变片粘贴点处的应变数据, 仿真结果如 图 3 所示 。其中, 1 号选定位移测量点所对应的数据集结 构示意如表 1 所示, 其余 6个选定位移测量点所对应的数 据集与之类似。
得到仿真数据集后, 将其按照 80% 、10% 、10% 的 比率划分为训练集 、验证集和测试集分别用于神经网络 的训练 、验证和柔性翼肋变形自感知方法测试评价。
3 神经网络训练
在确定了训练集 、验证集和测试集后, 就可以开始 对神经网络进行训练 。训练过程中, 首先需要确定神经 网络的学习算法 。神经网络的学习算法实际上是一类利 用梯度下降原理最小化误差的优化方法, 其主要包括梯 度下降法 、Momentum 法 、RMSprop 法以及 Adam 法等。
Momentum 法 (动量法) 是为了“之字形”下降问题 而提出的一种学习算法 。这种方法通过引入“动量”的 概念, 即下降的方向是由本步计算出的梯度和前几步中 计算出的梯度共同决定 。这种方法的直观效果就是当前下降方向不再高度敏感于本步计算出的梯度, 减少了 “震荡”的情况 。RMSprop 法是为了解决在接近极小值时 收敛速度缓慢的问题而提出的一种学习算法, 它改进自 另一种 .AdaGrad 算法, 能够适用于非凸条件下的优化问 题 。这种方法通过计算出的梯度对学习率进行动态调整, 能够在梯度不“陡峭”的情况下使用较小的步长来更加 平滑的接近目标 。而 Adam 法结合了Momentum 法以及 RMSprop 法的优点, 通过同时考虑下降方向以及下降步 长, 能够加快收敛并减小震荡, 且对超参数的选择具有 一定鲁棒性, 不容易陷入局部最优的情况 。经过试验对 比可明显发现其比其余学习算法效果更好, 因此本文中 选取 Adam 法作为学习算法
然后将训练集上的数据输入搭建完毕的神经网络结 构中对其进行训练并使用验证集测试其是否产生过拟合 现象 。在本文中, 由于神经网络的规模较小, 在训练中 产生了过拟合现象, 因此需要对其进行抑制 。过拟合的 抑制方法主要有可以采取提前停止法, 正则化法以及 dropout 法等。
其中, dropout 法的工作原理则是在神经网络的每次 训练的时候都让随机的一部分神经元失活, 以此来防止 神经网络的输出过于依赖性某些神经元 。 由于单个神经 网络神经元学习到的特征是随机的, 不再过于应付于某 几个上一层的神经元, 使得训练完成的神经网络更具鲁 棒性 。 由于该方法实现方便且在用于本文所采用的全连 接神经网络上时的效果十分显著, 因此本文选择 dropout 法进行过拟合的抑制。
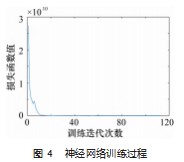
在选择好了神经网络的学习算法和过拟合的抑制方法, 然后就可以继续通过动态调整学习率对神经网络进行训练了 。通过不断迭代学习过程, 使得神经网络在训练集上达到一定的输出精度, 得到一个训练好了的神经网络。其中, 用于评价神经网络输出精度的目标损失函数值在训练过程中的变化示意如图 4 所示。
训练完成后经过验证, 神经网络在训练集及验证集 上的输出精度较为接近, 即其不存在明显的过拟合现象, 可以被用于输出选定位移测量点竖直方向上的空间位移 对进行柔性翼肋变形进行自感知。
4 自感知效果评价
为了对这种柔性翼肋变形自感知方法的效果进行评价, 本文用测试集数据模拟应变片传入的应变数据测试 该方法的感知精度 。在评价中, 本文将柔性翼肋被划归成测试集的变形仿真结果作为真实值, 变形自感知结果 与其之间的差异为该自感知方法的误差。
由于最终自感知出的柔性翼肋变形情况是由翼肋上 下表面 7个选定位移测量点拟合得到的, 因此本文将首先 对比在翼肋上下表面 7个选定位移测量点处的误差 。在测 试数据集上, 计算机仿真位移结果和神经网络输出结果的 绝对误差小于 0.42 mm, 相对误差小于 6.00% 。7 个选定 位移测量点的绝对误差和相对误差分别如表 2 ~ 3 所示。
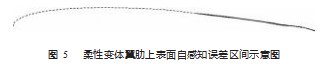
对比柔性变体翼肋仿真出的变形曲线与通过选定选 定位移测量点拟合出的自感知变形曲线之间的误差, 由 于测试集数据较多, 因此本文选择通过绘制误差区间的 方式展示这种柔性变体翼肋自感方法的误差 。 由于自感 知得到的变形曲线是由选定位移测量点拟合而成, 因此 可以认为该种柔性翼肋变形自感知方法的最大相对误差 与选定测量点处的最大相对误差相同, 即该柔性翼肋自 感知方法的最大相对误差也约为 8.20% 。其中, 柔性变 体翼肋上表面的变形自感知误差区间如图 5 所示, 其中 的虚线部分是仿真出的柔性变体翼变形曲线, 而实线部 分则是根据神经网络预测误差极值所拟合出的误差区间 的上下限, 下表面的变形自感知误差区间与之类似。
5 结束语
本文提出的柔性翼肋变形自感知方法基于神经网络 技术, 采用了神经网络技术, 充分运用所在柔性翼肋上 所采集的应变值和驱动力值, 准确地描述了柔性翼肋在 同时受到驱动力和气动力情况下的变形状态 。经过仿真 验证, 其自感知误差小于 8.20%, 满足实际工程需求。
与其他应用应变传感器反求变形的方法相比, 本文 提出的柔性翼肋变形自感知方法具有如下优势:
( 1 ) 传感器布局在柔性翼肋上, 避免受气动作用力 和蒙皮弹性变形的干扰;
( 2 ) 可以充分利用驱动力大小的数据获得较为准确 的结论;
( 3 ) 对比其他的将传感器布局在机翼翼面上的变形 反求方法, 可以用使用较少的传感器达到效果。
在本文研究的基础上, 可以利用循环神经网络结构 对柔性变体翼肋的变形自感知, 更好地反映其在变体飞 机机动时的变形情况; 也可以综合考虑变体机翼内部的 多个柔性翼肋变形的互相影响, 更好地反映变体机翼的 扭转等变形趋势。
参考文献:
[1] Gurumukhi S . Study of various trends for morphing wing technol⁃ ogy[J]. Journal of Computational Methods in Sciences and Engi ⁃ neering, 2021. 21(3):613-621.
[2] T L Grigorie, R M Botez, A V Popov. How the Airfoil Shape of a Morphing Wing Is Actuated and Controlled in a Smart Way[J]. Journal of Aerospace Engineering, 2013. 28(1): 4014043. 1- 4014043. 13.
[3] Woods B , Da Yyani I , Friswell M I . Fluid/Structure-Interaction Analysis of the Fish-Bone-Active-Camber Morphing Concept [J]. Journal of Aircraft, 2015. 52(1):307-319.
[4] 李小路, 江月松,何云涛 . 机翼变形的双激光器实时测量原理 [J]. 光学技术,2006(3):333-336.
[5] 韩涛,吴衡 . 基于立体视觉的直升机旋翼桨叶三维动态变形测 量[J]. 科学技术与工程,2018. 18(8):322-327.
[6] Tessler A ,Spangler J L . A Variational Principle for Reconstruc ⁃ tion of Elastic Deformations in Shear Deformable Plates and Shells[Z].2003.
[7] Foss G C , Haugse E D . Using Modal Test Results to Develop Strain to Displacement Transformations[J]. Proceedings of SPIE - The International Society for Optical Engineering, 1995. 2460: 112.
[8] Ko W L ,Richards W L ,Tran V T. Displacement Theories for In- Flight Deformed Shape Predictions of Aerospace Structures [Z].2007.
[9] 于惠勇,李华峰, 曾捷,等 . 可变弯度机翼后缘形态重构光纤监 测技术[J]. 航空学报,2020.41(10):220-227.
[10] Maniatopoulos Andreas, Mitianoudis Nikolaos. Learnable Leaky ReLU (LeLeLU): An Alternative Accuracy-Optimized Activa⁃ tion Function[J]. Information, 2021. 12(12) : 513.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/57041.html