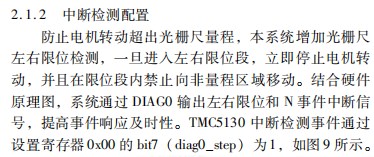
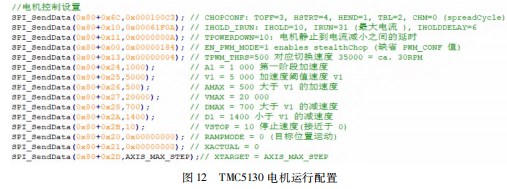
SCI论文(www.lunwensci.com)
摘要: 光栅尺位移传感器经常应用于闭环伺服系统中, 用作直线位移的检测。为提高显微镜载物台定位精度, 满足人们对显微镜自 动成像以及自动化测量的要求, 提出了一款基于高功率步进电机驱动器 TMC5130. 利用光栅尺测量平台位移反馈给处理器进行位移 补偿的控制系统, 实现直线运动平台的闭环控制。详细介绍了运动系统的硬件组成和软件设计, 并且搭建了试验样机, 开发了上位 机测试工具。实验证明: 所设计的直线运动平台位移精度达到 1 μm, 具有精确定位功能, 可应用于部分运动定位控制系统。
关键词: 光栅尺Mercury ⅡTM,6510.步进电机,TCM5130
Design and Implementation of Linear Motion System Based on Linear Scale Feedback
Dou Shilei, Wang Shuang
(School of Automation,Nanjing University of Science and Technology,Nanjing 210014.China )
Abstract:Grating ruler displacement sensor is often used in closed loop servo system to detect linear displacement.In order to improve the positioning accuracy of the microscope stage and meet people ′s requirements for automatic imaging and automatic measurement of the microscope,a control system based on the high-power stepping motor driver TMC5130.which used the displacement feedback of the grating ruler measurement platform to the processor for displacement compensation,was proposed to realize the closed-loop control of the linear motion platform.The hardware composition and software design of the motion system are introduced in detail,and the test prototype was built,and the upper computer test tool was developed.The experiment proves that the displacement accuracy of the designed linear motion platform reaches 1 μm and has the function of precise positioning,which can be applied to some motion positioning control systems.
Key words:linear Scale Mercury ⅡTM 6510;stepper motor;TCM5130
0 引言
显微镜是观察微观世界不可缺少的工具, 一般应用 于生物 、医药 、微观粒子等观测。传统的显微镜操作主 要是通过操作人员手动操作, 存在精确操作难度大等缺 点 [1], 无法满足人们对显微镜自动成像以及自动化测量的要求[2] 。针对显微镜载物台的高精度电动位移控制,电控部分本文采用步进电机 103H5205-5210 、步进电机驱动器 TMC5130 、光 栅 尺 Mercury ⅡTM 6510 和 处 理 器 STM32F407 组成的控制器, 实现 4 通道直线运动的高精 度闭环控制, 从而实现显微镜载物台的高精度自动测量 和精确定位。图 1 为系统实物图, 图中仅接入一个通道的光栅尺检测和电机控制。
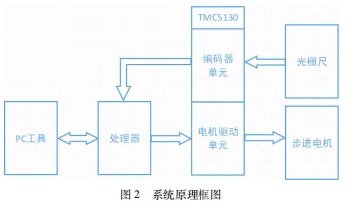
针对直线运动控制应用系 统[3-5], 步 进 电 机 丢步、开环特性或丝杆自身误差往往会造成载物台位移不准确, 本文直线运动控制系统中, 通过光栅尺读头反馈的实际 移动距离和目标位置比较的差值, 再控制电机运动补偿 这个差值, 从而形成闭环运动, 实现实时直线平台精确 定位。本文主要介绍了控制系统的硬件和软件设计过程, 控制系统原理图如图 2 所示, 此系统具有交互性好 、运 动精度高的特点。
1 系统硬件设计
系统硬件总体框图如图 3 所示, 主要包括 STM32 控制电路 、步进电机驱动及编码器电路 、步进电机 、光栅 位移传感器和 CAN 通信电路。STM32F407 处理器通过 SPI 通信接口方式控制 4 路步进电路和光栅位移传感器检测, 根据光栅反馈相对位置, 反控步进电机, 实现高精 度闭环控制。CAN 通信电路用于接收 PC 软件控制指令 和反馈位移信息, 进行人机交互。
1.1 步进电机驱动及编码器电路
本系统采用 TRINAMICs 两相双极性步进电机驱动器 TMC5130. 通过外置外部晶体管, 可实现高动态 、高扭 矩电机驱动。先进的 spreadCycle 和 stealthChop 斩波器, 驱动器可绝对无噪音的运行, 并实现最大效率和最佳电 机扭矩控制。并且 TMC5130 为外部增量编码器提供编码 器接口, 可编程预分频器设置编码器分辨率以适应电机 分辨率。
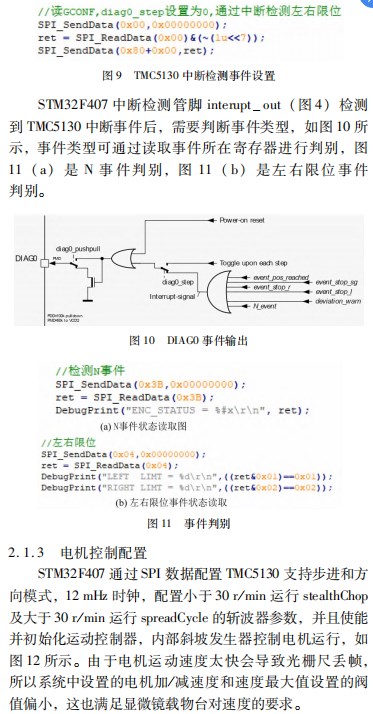
主控处理器 STM32F407 通过 SPI 方式与 TM5130 通信, REFL_ STEP 和 REFL_ DIR 分别作为光栅尺左右限位 信号输入, 由于 SD_ MODE =0 且 SPI_ MODE = 1. 诊断 输出信号 DIAG0 和 DIAG1 分别输出 REFL_ STEP 和 REFL _ DIR 至主控处理器, 通过中断方式判断光栅位移是否越 界以及相关事件检测。DRV_ ENN 为驱动器使能输入,当该引脚被驱动到高电平时, 所有电机输出为悬浮状态。 ENCA 和 ENCB 为编码器 AB 通道输入, 用于检测 AB 相 正交编码信号获取光栅尺输出脉冲信号数得到相对位移 信息。ENCN 为编码器 N 通道输入, 用于光栅尺绝对零点参考点判断, 本文中使用的光栅尺反馈的是相对位移 数据, 故需进行归零位处理。CLK 作为驱动芯片时钟输 入。OA1/OA2 和 OB1/OB2 分别为电机线圈 A 和 B 输出控制信号。TM5130 驱动电路如图 4 所示。
1.2 步进电机
本系统采用 Sanyo Denki 直流步进电机 103H5205- 5210. 双极, 单极步进, 步进角度为 1.8°, 电源电压为 24 V, 额定电流为 1 A, 最大转矩为 0.265 N · m [6] 。
1.3 光栅位移传感器
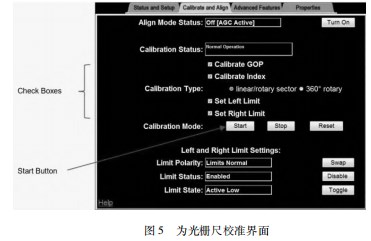
本系统采用 Mercury ⅡTM 6510 光栅, 线性分辨率 20 μm,可编程内插参数从 x4 到 x16384. A-quad-B 输出, 带粘贴式光学零位和左/右限位, 以及警报功能。系统使用光 栅内插参数默认为 x400. 即分辨率为 50nm/count 。使用需要根据其规格书进行安装, 左右限位标记条和绝对零 点标记条安装完成后需要使用 SmartPrecisionTM Alignment Tool 进行校准[5-6], 图 5 为光栅尺零位和左/右限位校准界面。
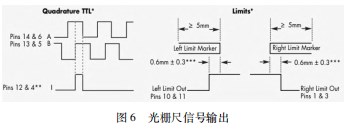
图 6 为光栅尺输出的编码器 A 、B 、N 相信号, 送到 TMC5130 获取光栅尺零点位置和相对位移信息。
1.4 Can 通信电路
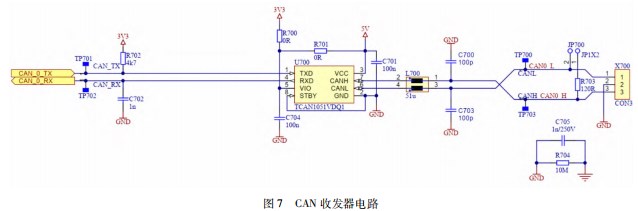
本系统通过 can 接口方式通信, 方便控制总线挂载 新节点, 并且 can 总线具有很强的抗干扰性和数据传输 距离远特点。图 7 为 can 接收器电路。
2 系统软件设计
本文系统中, 软件设计主要包括 TMC5130 的 SPI 配置和闭环控制逻辑, 步进电机驱动器 TMC5130 配置主要 包括步进电机控制配置 、编码器配置 、 中断检测配置。闭环控制逻辑负责自动归零 、位移补偿等。
2.2 控制逻辑
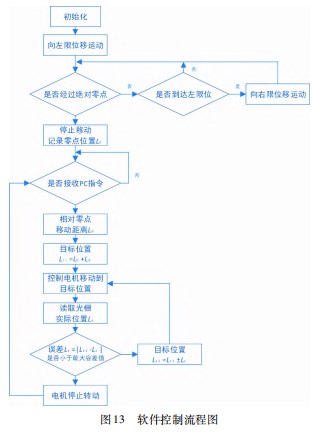
设备上电后, 需要自动找到绝对零点位置, 记录零 点位置 L0. 并且停在零点位置。接收 PC 控制指令, 控 制电机向零点位置的左侧或右侧移动 Ld 距离, 移动至目标位置后, 读取光栅尺反馈的实时位置数据, 计算出移 动误差 Le, 当 Le 值小于设置的最大容错差值时[9.11], 此 次移动控制结束, 否则继续向目标位置移动, 重复上述过 程直到误差达到系统容差[10], 详细软件流程如图 13 所示。
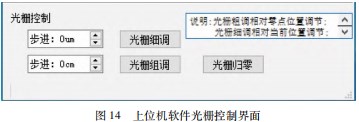
3 上位机软件设计
本系统通过 QT 设计上位机控制软件, 实现 USB 转 CAN 对闭环系统进行指令控制, 主要实现光栅尺归零、 光栅尺细调和光栅尺粗调 3 个功能, 如图 14 所示。
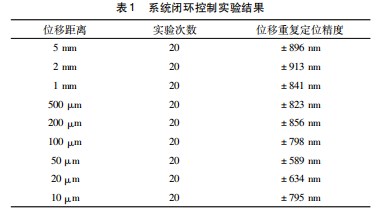
4 测试验证与结果分析
为验证本系统的运动位移控制精确度, 使用激光干 涉仪检测系统闭环运动下误差范围, 实验测试结果如表 1 所示。本文中位移重复定位精度是光栅尺归零位后, 每一项位移控制重复测试 20 次得到的平均定位误差。
参考文献:
[1]沈思嗣,杨怡姝,王小利,等.配有电动载物台倒置显微镜的 操作[J].实验室研究与探索,2010(12):4-8.
[2]康军.显微镜平台 自动控制 系统设计 [ J].科技资讯,2014 (8):9-10.
[3]翁孚达,周起华.步进电机闭环伺服系统的高精度控制[ J]. 制导与引信,2013.034(001):13-17.
[4]刘红丽,崔建明,曹春岩.光栅尺在永磁直线同步电动机测速 测位移中的应用[J].电气技术,2009(12):26-28.
[5]节德刚,刘延杰,孙立宁,等.基于双光栅尺的高速高精度位 移测量方法[J].光学精密工程,2007(7):1077-1083.
[6]苏红.光栅尺位移测量仪表的研究[ D].咸阳:西北农林科技 大学,2008.
[7]袁炜.论直线光栅尺及使用方法[ J].金属加工:冷加工,2013 (11):62-64.
[8]张晓宏,岳永坚,刘恩海,等.基于光栅信号的步进电机速度 控制[J].光电工程,2000.27(1):29-32.
[9]王国林,殷旻.基于光栅尺反馈的高精度步进电机位移台系 统开发[J].太原理工大学学报,2015.46(5):587-591.
[10]钱钟泰. 系统误差、偶然误差、随机误差和疏忽误差的分类 方法[J].仪器仪表学报,1986(4):346-351.
[11]吴耀春,萧泽新.基于光栅检测的显微镜闭环扫描控制系统 的设计[J].光学与光电技术,2008.6(2):71-73.
[12]周贤德,顾鹏,朱传敏.基于伺服电机闭环控制的直线运动 平台开发[J].物联网技术,2019.9(10):50-51.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/56856.html