SCI论文(www.lunwensci.com):
摘要:目前海上风机、升压站等相关主配套单元的安装主要采用自升式安装船或者浮式重吊船,当该类船舶在浮态进行吊装的时候,由于所吊物件的质量较大,进行吊装作业时,在保证船舶安全的前提下如何提高装机速率显得尤为重要,则此时具有良好的抗衡倾系统的船舶来执行此类工作是满足以上要求的必不可少的保证。抗衡倾系统主要是通过控制船舶左右两舷的压载舱的压载水,在船舶进行吊重过程中使船舶时刻保持在平衡的状态,从而保证船舶的安全性。抗衡倾系统的设计分为主动补偿和被动补偿两种方式,其中主动补偿在现有船舶中应用较少,以某5 000 t风电安装船为例,阐述了两种补偿方式的应用。
关键词:风电安装船;抗衡倾;压载
Design Principle and Application of Anti-heeling System for Ultra Large Wind Turbine Installation Vessel
Yan Jianjun1,Gu Jie1,Liang Yanfeng1,2,Jiang Jijiang1,2,Zhang Yongkang3
(1.COSCO Shipping(Qidong)Offshore Co.,Ltd.,Qidong,Jiangsu 226200,China;2.COSCO Shipping Heavy Industry Co.,Ltd.,
Shanghai 200135,China;3.School of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
Abstract:At present,the installation of offshore wind turbines,booster stations and other related main supporting units mainly adopts self elevating installation vessels or floating heavy lifting vessels.When such vessels are hoisted in the floating state,due to the large mass of the lifted objects,it is particularly important to improve the installation rate on the premise of ensuring the safety of the ship.At this time,it is an indispensable guarantee to meet the above requirements that ships with good anti-heeling system perform such work.The anti-heeling system is mainly used to control the ballast water in the ballast tanks on the left and right sides of the ship to keep the ship in a balanced state at all times during the lifting process of the ship,so as to ensure the safety of the ship.The anti-heeling system is designed in two ways:active compensation and passive compensation.Active compensation is rarely used in existing ships.Taking a 5 000 t wind power installation ship as an example,the application of two compensation methods was described.
Key words:wind turbine installation vessel;anti-heeling;ballast
0引言
随着能源问题与环境以及发展矛盾的日益显著,风力发电成为近年来世界各国普遍关注的可再生能源开发项目之一,相较于陆上风电,海上风电场的优势明显:海上风速较高,资源丰富;风机机组的噪声控制问题相对而言不是很突出;机组大型化的应用空间较大,单机的装机功率较大等。海上风电安装船由此应运而生。随着风机单机功率的发展,该类型船舶的装机能力、重吊能力和甲板的可变载荷要求越来越高,目前欧洲市场的风电平台的吊重能力普遍超过3 000 t,部分超级大型的风电安装船甚至于达到5 000 t,该类型的船舶在浮态时进行重吊作业,吊机和重物在半径范围内都会对船舶产生横倾力矩,从而导致船舶的横倾。为避免船舶的倾覆,通常该类型的船舶配置有抗横倾系统,该系统通过调拨船舶左右舷的抗横倾舱内的水,来抵消吊机作业所引起的船舶横倾力矩,来保证船舶的平衡和吊重左右的安全。目前主流市场主要配置有被动补偿抗横倾系统,然而被动补偿系统只有在船舶达到预先抗横倾系统设定值(如船舶倾角设定等),抗横倾系统开始运行来平衡船舶,保持船舶的安全。本文主要介绍主动补偿系统,其在船舶重吊开始时则通过监控重吊对于船舶所产生的横倾力矩来运行系统,从而可以使得船舶在不停止重吊的情况下也能保证船舶的平稳。
1抗横倾系统简介
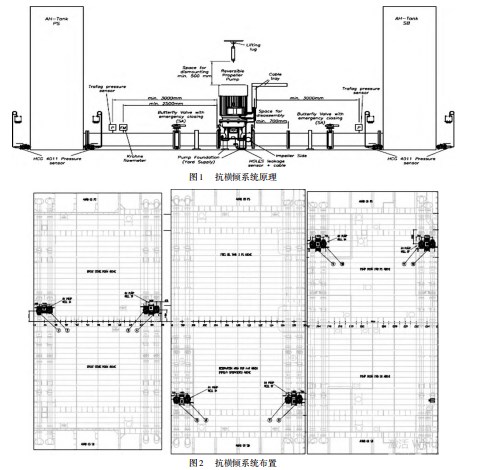
抗横倾系统的原理如图1所示。抗横倾泵安装在船舶中央,通过管路、阀件与船舶左右两舷压载舱连通。通常抗横倾系统设定自动平横倾角设定值,当船舶倾角达到或超过抗横倾系统所设定的倾角时,则此时系统的阀会陆续打开,同时抗横倾泵也将启动将倾斜侧压载舱的水驳运至另一侧的压载舱之内,直至船舶达到平衡为止,则此时该系统的倾斜仪(MRU)会给控制系统信号,停止抗横倾泵,同时关闭相应的阀门,此后系统会自动进入待机模式,当船舶的倾角再次超过设定值时,抗横倾系统会重复上述动作,以保证船舶的安全作业。
2抗横倾系统实船应用及设计原理
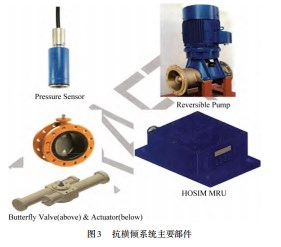
某船厂5 000 t浮式风电安装船项目配置有较为先进的抗衡系统,该系统包含12台可以正反转的抗横倾泵,为3对抗横倾舱(AHWB03,AHWB05,AHWB09)服务,抗横倾泵的主要参数为1 500 m3/h 15 m,设备的布置如图2所示。
2.1抗横倾系统主要部件介绍
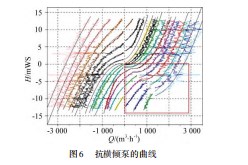
抗横倾系统主要包含的设备介绍如下。
(1)液位传感器:每个抗横倾舱配置有2套液位传感器,用于测量舱内压载水的舱容。2套液位传感器的主要作用是当其中1套出现故障后,另外1套依然能保证系统的正常运行。
(2)抗横倾泵:每对抗横倾舱通过管路、阀门及泵相联通。每台泵都有单独的变频控制,每个阀门都有自己独立的控制系统,一对抗横倾系统中,单独的泵、阀门或者其他部件故障时,其他的几组可以正常运行。
(3)倾斜仪:该系统配置有两台倾斜仪,一台布置在左舷,一台布置在右舷,都位于船中位置,当其中一台损坏时,另外一台依然可以保证系统的运行,然而当两台同时失效时,位于泵组控制箱内部的倾角传感器通过光纤与系统连接,用以控制抗横倾系统,同时船舶的倾斜仪数据也会通过综控传输到抗横倾系统内部,但是该信号仅仅作为参考信号,不用于系统的控制。
(4)阀控系统:每条管线上布置有两个电液式遥控阀,分别位于抗横倾泵的两侧,该阀门的驱动头全部连接到阀门的单独控制箱内。
主要部件如图3所示。
2.2抗横倾系统控制界面简介
抗横倾系统的控制界面如图4所示,包含了抗横倾系统的所有的控制以及运行过程中所监控到的系统运行信息。
Total部分是抗横倾系统的设计和计算的基础,也是判断船舶抗横倾能力的大小的依据,操作界面如图5所示。在Total部分中包含Heeling Angle、Tank Moment和Tank Flow,是对于船舶倾角状态状态和抗横倾系统实时能力监控,即此刻该船舶抗横倾能力的大小在此上面可以得到直观反馈。
(1)Heeling Angle
左侧的竖直列中的范围为-2.5°~2.5°,橙色的显示的是横倾角度的warning limits,红色的是alarm limits。以上的这两个设定点可以根据需要进行调整,如warninglimits设定为±1°,alarmlimits设定为±1.5°。
(2)Tank Moment
Tank Moment由中间的立柱显示,显示的范围为±2 000 MN⋅m。该立柱显示的是被激活的舱室所具有的最大的净力矩。净力矩是通过激活的左边舱和激活的右边舱的容积通过合并计算而得。
橙色的立柱“3”显示的是Tank Moment Limitation,当一对抗横倾舱未曾激活则limitation将会下降,当一对抗横倾舱激活后则limitation将会增大。上述数值“5”表示Usage Percent⁃age和Availability Percentage。Usage Percentage为激活的抗横倾舱的净力矩与系统设计的最大的力矩的比值;Availability Percentage为该状态下抗横倾舱的所能产生的最大的净力矩与系统设计的最大的力矩的比值。举例说明如下。
例1:3对抗横倾舱系统正常,每对舱水量总和为100%;两对抗横倾舱(Tank Pair 2#&3#)的左边舱和右边舱压载水的液位正好是50%;Tank Pair1#的液位左边舱为75%,右边舱
为25%。则此时:

当每个舱的液位在50%的时候,所能产生的扭矩是最大的,所以此时Availability为100%。
例2:3对抗横倾舱系统正常,Tank 1的水量总和为100%;Tank Pair 2#和Tank Pair 3#的左右两个边舱的液位均为60%(Total>100%);Tank Pair 1#的左右两个边舱的液位均为50%。
则此时:

例3:仅两对抗横倾舱系统正常,Tank 1的水量总和为100%;Tank Pair 2#的左右两个边舱的液位均为60%(Total>100%);Tank Pair 1#的液位左边舱为75%,右边舱为25%。则此时:
(3)Tank Flow
该Tank Flow主要是指系统在运行的过程中,系统所具有的瞬时流量。
2.3抗横倾系统控制模式的介绍
该项目的抗横倾系统包含有4种控制模式:Manual Mode;Pre Heel Mode;Auto Heel Mode;LMC(Load Moment Control)Mode。具体如下:
(1)Manual Mode:手动控制泵的流量,转速等来调整船舶的倾角;
(2)Pre Heel Mode:通过人为的预设定船舶的倾角,抗横倾系统根据该设定值自动将船舶调整到该设定的船舶倾角;
(3)Auto Heel Mode:该模式为抗横倾系统的被动补偿模式,即当船舶的倾角达到预先设定值(如:-0.2°,+0.2°)时,则此时系统会自动启动,将船舶的倾角调整到0°为止,该模式在船舶的运行过程中使用会较为频繁。
(4)Load Moment Control Mode(LMC Mode):该模式为主动补偿模式,主要运用于船舶的重吊作业,对于重吊船的作用至关重要。
以上所述4种控制模式中前面3种模式用的较为普遍,通常在集装箱船上面应用较多,而第4种控制模式对于系统和控制的要求较高,下文对此作简单的介绍。
LMC Mode作为重吊过程中的控制,主要的接口在于吊机,其中与吊机的接口如下:
(1)Slew Angle:吊机的该信号直接由船舶的综控输出到抗横倾系统;
(2)Boom Angle:吊机的该信号直接由船舶的综控输出到抗横倾系统;
(3)Main Hook Load:该界面显示总的主吊钩吊重,该吊重包含有吊钩及其附件的重量+吊机上货物的重量;
(4)Aux Hook Load:该界面显示总的浮吊钩吊重,该吊重包含有吊钩及其附件的重量+吊机上货物的重量。
以上4组信号为抗横倾系统需要从吊机处获得到的输入信号,在上述的信息取得之后,抗横倾系统结合船舶抗横倾舱的状态会进行船舶扭矩的计算,下文介绍两个专业术语:
(1)Total Crane Moment:吊机在任何给定时间产生的总力矩,该数值为绝对值,没有经过去毛重后的数值,属于总的扭矩,即使在吊机不运行且吊钩上并没有重物,该数值都不会为0;
(2)Uncompensated Crane Moment:未得到补偿的吊车力矩是在吊车的总力矩中减去吊车毛重力矩、船舶净力矩和抗横倾本身的力矩而得到的力矩。
结合上文提到的两个专业术语,简单介绍船舶LMC Mode运行的基础数学模型,未得到补偿的力矩计算公式如下:
Uncompensated Moment=Tank Moment–(Crane Total Mo⁃ment+Tare Moment)任何时刻Tanks Moment&Crane Total Moment为恒定值,每一步操作时将Uncompensated Moment设定为0,确保后面操作过程中,抗横倾系统的补偿都是吊机的动作所产生的力矩。在船舶运行过程中,抗横倾系统确保uncompensated mo⁃ment非常低,以及船舶的横倾角度尽量不变化,但是如果吊机的扭矩和扭矩的变化远大于抗横倾的泵调整速度,此时uncompensated moment和船舶的heelangle将快速增长而无法调整。
当船舶的扭力平衡之后,此时抗横倾系统开始调整,来平衡各个舱室的液位到servicelevel确保tank moment和heelangel不改变。如果舱室的液位平衡后会改变tankmoment,则此时泵进入idlemode。在idle mode情况下,泵和阀门全部在运行,但此时为零流量。泵会自动转入RPM Control来平衡两个液舱的液位差。
LMC Mode包含有两种操作状况:Splash Zone Operation&Deck Operation。该模式主要用于补偿吊机引起的船体力矩,泵的控制模式为Flow Control Mode,流量的大小通过系统吊机运行过程中对于船舶产生的力矩的变化而变化。
(1)Splash Zone Operation
在船舶动力定位下运行过程中,吊机将货物下放到海水里面时,此时海水海浪对于货物的影响必须考虑到。当海浪打到货物上面时,则此时会对于货物有浮力以及其他相关力的作用,此时对于吊机的力矩会有一定的影响。因为该部分的力是短时间时刻变化的,如果泵的流量根据这个不断的力矩频繁变化的话,对于泵的磨损会比较大。考虑到上述原因,则增加了“Splash Zone Operation”,当该模式启动后,则会在短时间内过滤掉这部分的力,这个时间可以设定,如20 s或者1min,在该时间段内CraneLoad Cell出现变化,则抗横倾泵开始自动调整流量。
(2)Deck Operation
该模式主要用在吊机将货物从主甲板吊起或者货物放置主甲板。货物从主甲板吊离或者放置到主甲板,则此时船舶的扭矩将会产生重大的变化,该部分的改变也必须考虑进去。该模式的计算基础及原理:当Deck Operation激活后,吊钩载荷会加到Tare Moment上,当该模式de-actived时,吊钩的载荷会从Tare Moment上删除掉。以下举例说明。
假设船舶的吊机位置在中线上,吊臂的长度为100m,吊臂的重心在50 m的位置,吊臂的质量为10 t,起始位置吊臂在boomrest上面,令:ML为Moment due to the load only;MC为Moment due to the crane body(in this case the boom);MS为Ship Moment/Tare Moment;MT为Tank Moment=ML+MC+MS,默认为Uncompensated Moment一直为零。
例1:5 t的货物放置主甲板,吊臂向左舷旋转90°,准备吊起重物,则有:ML=0;MC=10 t×50 m=500 m·t;MS=0;MT=500 m·t。吊机将货物吊起,则有:ML=5 t×100 m=500 m·t;MC=500 m·t;MS=0;MT=1 000 m·t。货物吊至右舷偏离中心线5 m的位置,但是此时货物未放置主甲板,则有:ML=5 t×-5 m=-25 m·t;MC=10 t×-2.5 m=-25 m·t;MS=0;MT=-50 m·t。Deck Operation Mode Active,并且货物放置主甲板,则有:ML=0;MC=-25 m·t;MS=0+(-25)=-25 m·t;MT=-50 m·t。当货物放好之后,De-Active Deck Operation Mode,则有:ML=0;MC=-25 m·t;MS=-25-(0)=-25 m·t;MT=-50 m·t。
例2:5 t的货物从主甲板吊起。当完成例1的操作之后,将货物吊从左舷距离中线5 m的位置吊起。当吊机到达货物的上方时:ML=0;MC=10 t×2.5 m=25 m·t;MS=-25 m·t;MT=0。Deck Operation Mode Active,负载转移到吊机上时:ML=0;MC=25 m·t;MS=-25+0=-25 m·t;MT=0。当货物的重量全部转移到吊机上后,吊机开始旋转,此时De-activedDeck Opera⁃tion Mode:ML=5 t×5 m=25 m·t;MC=25 m·t;MS=-25-(25)=-50 m·t;MT=0。当吊机开始旋转到270°到达货物点时:ML=5 t×-100 m=-500 m·t;MC=10 t×-50 m=-500 m·t;MS=-50 m·t;MT=-1 050 m·t。吊机放下货物后:ML=0;MC=-500 m·t;MS=-50 m·t;MT=-550 m·t。
2.4抗横倾系统布置及设计注意点
抗横倾系统的设备和管系的布置对于抗横倾系统的能力也存在一定的影响,根据此项目的相关经验,总结在设计过程中需要考虑到的主要的注意点如下。
(1)考虑到抗横倾系统的能力,泵布置的位置越低越好,以便抗横倾舱的可以使用到的有效舱容越多。
(2)若有朝下的弯头加吸口的话,吸口的周边不要有强结构,且吸口的高度要计算,现场要控制好。
(3)抗横倾泵的布置尽量都位于船舶的中线位置,以便管道的阻力不会对于系统的流量产生影响。
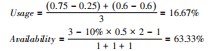
(4)抗横倾泵的曲线如图6所示,由该曲线可以看出如果一对抗横倾舱布置有2台或者4台抗横倾泵,尽量保证一半的抗横倾泵的朝向与另外一半相反,由泵的曲线可以看出来,抗横倾泵的正反转的流量有较大区别;以上的正反方向布置在管路布置类似的情况下,可以保证左右驳运时,流量不会产生较大的差异。
(5)在抗横倾系统中玻璃钢管较多,且船舶的管路均为玻璃钢管,在做固定支架的时候,需要注意使用滑动支架和膨胀节,以便减少船舶的变形应力对于管路的影响。
(6)管路的布置应尽量直,减少非必要的弯头等。
以上管路的注意点是为减少由于管路的原因导致流量的不足,设备的布置注意点是为了减少左右平衡时流量的稳定。
3结束语
随着风电市场的装机功率越来越大以及风电市场也逐步地从近海走向远海,目前市场上对大型风电船的需求也逐步增大,考虑到船舶的操作性以及稳性,抗横倾系统在该种项目上面显得尤为重要。新的市场对于该系统又提出新的要求,如何将该系统与船舶的装载计算机通讯,通过船舶的稳性高度(GM)来控制该系统的运行,从而做到主动补偿,将会是对于未来大型重吊船更加切实的要求。该要求在船舶的初始设计阶段需要做好详细的分析,虽然抗横倾系统对于重吊船的运营来说比较重要也是非常可靠的系统,但该系统的缺陷也较为明显,初期的投资较大,对于船舶电站的要求较高,也希望在技术不断发展和进步的基础之上,该系统的成本越来越低,从而得到进一步的应用。
参考文献:
[1]赵家林.抗横倾系统在集装箱船上的应用综述[M].江苏船舶,1996,12(6):7-9.
[2]陈雷,李含苹.超大型起重船压载调载系统研究设计[J].船舶,2010(1):10-13.
[3]中华人民共和国海事局.船舶与海上设施法定检验规则-国内航行海船法定检验技术规则2011[M].北京:人民交通出版社,2011.
[4]American Bureau of Shipping.Rules for Building and Classing Offshore Support Vessels 2018[S].
[5]池田良穗,芳山朋史(日).连通型防摇水舱的研究[J].日本造船学会论文集,1991(216):111-119.
[6]徐邦祯,姜华.重大件货物装卸中船舶稳性的计算及调整[J].大连海事大学学报,2003(1):50-53.
[7]吕川.船舶气动式抗横倾装置的研究[D].大连:大连海事大学,2008.
[8]盛振邦,刘应中.船舶原理(下册)[M].上海:上海交通大学出版社,2004.
[9]金鸿章,李国斌.船舶特种装置控制系统[M].北京:国防工业出版社,1995.
[10]冯铁城.在冲击外力矩作用下的横摇运动[J].中国造船,1988(3):8-10.
[11]张富民.船舶横倾平衡系统及设备开发[J].机电设备,2002(5):19-23.
[12]张权松.船用动载抗横倾平衡系统[J].柴油机,2005,27(3):36-37.
[13]刘英贵,刘令勋.船舶特辅装置与系统[M].北京:国防工业出版社,1999.
[14]Editor.Heel and roll stabilization[J].Shipping World&Ship⁃builder,1989(188):253-254.
[15]Editor.Effective roll stabilization[J].Shipping World&Ship⁃builder,1990(189):15-16.
[16]柏建勇.船舶自动横倾平衡系统[J].机电设备,2004(6):8-12.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/49178.html