SCI论文(www.lunwensci.com):
摘要:人口老龄化以及腿部疾病导致行走能力降低或丧失的人口数量急剧上升,传统轮椅的功能单一且对使用场所条件极为苛刻,尤其是在轮椅乘坐者需要上下楼梯台阶等障碍物时,在无人陪护或陪护操作不当的情况下,容易产生轮椅侧翻、失控,造成人身安全事故。因此设计了一种安全可靠的新型轮椅,既能适应平地行走又能在无看护人员陪同的情况下自动上下层数不多的台阶。同时,安全的结构和抗倾覆设计能够保证轮椅在上下楼梯过程中运行稳定、乘坐者姿态始终处于安全范围内。设计考虑了行动不便者的日常需求,丰富了轮椅的功能,且能保障使用过程的安全。
关键词:轮椅;台阶;自动化
Design of a New Type of Automatic Wheelchair with Up and Down Steps
Li Zhe1,Wu Shiying1,Xu Chang2※
(1.School of Mechanical and Electronics,Guangzhou Railway Polytechnic,Guangzhou 510430,China;2.School of Art and Design,Wuhan University of Technology,Wuhan 430070,China)
Abstract:The aging population and leg diseases have led to a sharp increase in the number of people whose walking ability is reduced or lost.Traditional wheelchairs have a single function and are extremely harsh on the conditions of use places.Especially when wheelchair occupants need to go up and down stairs and other obstacles,it is easy to cause wheelchairs to roll over and get out of control,resulting in personal safety accidents.A new type of safe and reliable wheelchair was designed,which could not only adapt to walking on flat ground,but also get up and down the stairs with few floors automatically without being accompanied by caregivers.At the same time,the safe structure and anti-overturning design ensured that the wheelchair runs stably and the occupant's posture always in the safe range when going up and down stairs.The design takes into account the daily needs of people with mobility disabilities,enriches the functions of wheelchairs,and can ensure the safety of the use process.
Key words:wheelchair;steps;automation
0引言
随着人口数量和人均寿命的双重增长,老龄化带来的社会问题日趋严重。我国老年人占比将近14%,老年人因机体功能降低、疾病等原因造成行走能力减低或丧失的非常多,而腿脚不便的残疾人士也超过8千万人[1]。这是一个庞大特殊的群体,需要社会的关爱,也需要多种适合他们心理和生理特征的辅助工具。轮椅是目前老年人和腿脚不便人士使用得最多也最方便的工具。借助于轮椅,使得老年人和腿脚不便的人士具有了一定的行动能力,他们可以自理生活、料理家务,甚至能胜任适当的工作。
由于结构上的缺陷,普通轮椅使用人员在上下楼梯时只能选择寻求他人帮助,即使是有人陪同的情况下,想要上下楼梯也十分困难[2]。普通轮椅使用者的日常生活很难自理,必须有人全天候陪同,无人看护时只能在家中狭小的空间范围里移动,长期不与外界接触不利于人的身心健康,且给家人也带来了麻烦。因此,解决老年人与残疾人士出行难最好的方法就是设计一种既能够像普通轮椅适应平地行走又能够翻越障碍、上下楼梯的轮椅。
美国的Bray在一百多年前开始研究上下楼梯的轮椅和装置。近半个世纪以来欧美各发达国家均开始关注可自动上下楼梯轮椅及装置的研究,有一些产品已经投入市场使用。目前已有的上下楼梯轮椅按其工作原理分为以下3种:履带式、轮组式和步行式。
履带式轮椅与普通轮椅相比最大特点是其内部安装了履带,可在需要时和普通轮子进行更替使用。其底部安装的4个普通车轮在平地运行时使用,当遇到楼梯台阶时,用户通过简单的操作将普通车轮收起,同时将履带轮更换到指定位置,通过电机带动履带转动,类似于坦克一样翻越台阶,无需旁人辅助便能自动上下楼梯。履带式轮椅在上下楼梯过程中行走连续性强,操作者不需要额外的操作即可完成上下楼,轮椅的重心一直沿着楼梯的倾角线直线运动,平稳安全。履带式轮椅最大不足是体积自重较大,平地行驶缓慢,上下楼梯时易造成楼梯边沿的破损[5-6]。
轮组式轮椅分为单轮组式和双轮组式,其上下楼梯的核心部件由均匀分布在Y形或十字形系杆上的多组小轮构成。各组小轮既能绕自身的轴线进行自转,又可随系杆一起绕中心轴进行公转。平地行走时,各小轮自转,上下楼梯时,各小轮一起公转,从而实现上下楼梯的功能。使用人员在乘坐单轮组式轮椅上下楼时无法保证重心的稳定,安全性较差;双轮组式虽能实现自动上下楼梯,但其体积过大且自身重量大,空间小的地方无法使用,平地上使用性差[7-9]。
通过对普通轮椅结构进行调整,加装铰链杆件组成可上下楼梯的步行式轮椅。上楼时电机驱动铰链杆件组运动,将轮椅和使用人员抬升并向前移动到第一阶楼梯上的位置,重复这种动作直至上完该段楼梯。步行式轮椅上下楼梯时平稳可靠,能适应多种不同尺寸的台阶,但它对控制的要求高,操作复杂,老年人使用比较困难,且对楼梯质量要求较高,上下楼梯速度较慢[10-12]。
目前对于可上楼轮椅的研究已有一定基础,针对前期设计中存在的问题,本文设计了一款适用于老年人或腿脚不便的人员且能够帮助使用者安全轻松地上下楼的新型轮椅。
1新型轮椅主要结构介绍
1.1主体结构
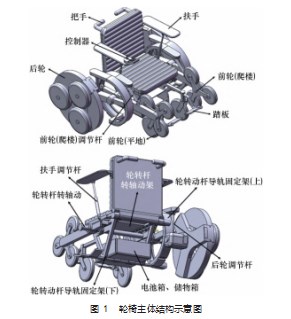
该新型轮椅的主体结构如图1所示。其在传统轮椅的结构基础上进行了相关改进。首先,设计摈弃了传统轮子的结构,采用三角轮并结合弹簧的机构,使轮子能够快速地在平地行驶状态、爬楼状态之间进行切换。考虑到轮椅上楼重心后倾的问题,在轮椅的后轮增加了伸缩杠保证轮椅上楼时的重心平稳。轮椅当上楼时,前轮向上行驶,后轮沿驱动杆伸展,控制轮椅的重心,防止轮椅后倾,极大地提升了轮椅的安全系数和平稳性。本产品还能实现座椅整体的抬升,解决了使用者的空间束缚问题。该设计解决了老龄人上下楼困难和普通上楼轮椅过坎不稳的问题,极大地降低了老人因上楼摔伤的概率。
1.2可变式轮体结构
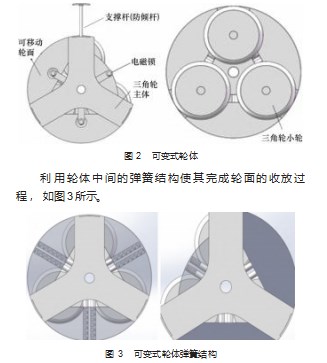
新型轮椅的轮子为可变式轮体,主体采用爬楼式三角轮,在平地时可移动轮面由弹簧弹出,当其完全弹出的时候将其锁住,使其在平地的轮面为一个完整的大圆,越过障碍物的能力得到提高。在爬楼梯的时候,可移动轮面解锁,使其遇到楼梯棱角的时候回缩进去,成为一个类似三角轮的可爬楼装置,如图2所示。
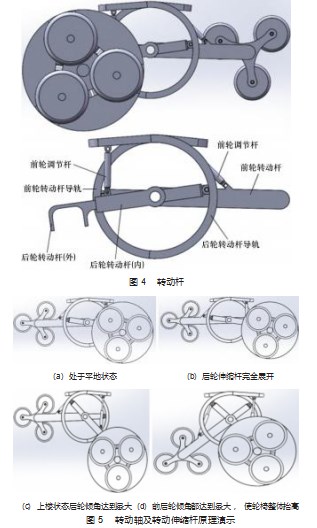
利用轮体中间的弹簧结构使其完成轮面的收放过程,如图3所示。
1.3转动轴及传动杆
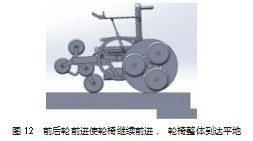
该轮椅上楼梯的过程中,轮椅传动轴的转动仅通过前后轮的运动的不同就可以实现,当前轮爬上前几级台阶时,轮椅整体倾角过大时,前轮锁死,后轮前进时,后轮逆时针旋转,使轮椅主体变为水平,然后转动杆锁死,轮椅继续前进,继续上述过程。当后轮也爬上楼梯的时候停止转动轴的倾斜度变化,开始向上爬升,当前轮到达平地时,前轮锁住,后轮向上爬升,直到转动杆完全缩回。然后整体上升,当轮椅整体倾角过大时后轮锁死前轮前进直到轮椅整体再次水平,重复上述过程,直到轮椅整体全部处于平地时结束,传动杆及其工作演示如图4~5所示。
2轮椅上楼梯过程描述
轮椅乘坐者在上楼前发出指令,后轮向后运动,将转动杆的缩入的部件全部伸出并锁死,前轮(爬楼)调节杆伸长,使前轮(爬楼)下降。
在上楼梯时由前轮(爬楼)先爬上第一级楼梯,随后前轮(平地)登上第一级台阶,然后锁死。后轮开始逆时针转动,使后轮向前运动,后轮调节杆伸长,转动杆开始转动,轮椅开始抬升直到座椅主体水平。
前轮允许转动,后轮允许转动,后轮开始逆时针转动,推动轮椅向前移动。由前轮(爬楼)先爬上第二级楼梯,随后前轮(平地)登上第二级台阶,然后前轮(平地)锁死。后轮开始逆时针转动,使后轮向前运动,后轮调节杆伸长,后轮转动杆开始转动,轮椅开始抬升直到座椅主体水平。
前轮允许转动,后轮允许转动,后轮开始逆时针转动,推动轮椅向前移动。由前轮(爬楼)先爬上第三级楼梯,随后前轮(平地)登上第三级台阶,然后前轮(平地)锁死。后轮开始逆时针转动,使后轮向前运动,后轮调节杆伸长,后轮转动杆开始转动,轮椅开始抬升直到座椅主体水平。后轮继续前进,当后轮开始爬上楼梯时,接触楼梯棱角的轮面回缩,与地面接触三角轮一角的后轮支撑杆伸长,帮助后轮爬上楼梯。
当轮椅整体位于楼梯斜面上,后轮允许转动,后轮逆时针转动,将轮椅整体推动向上。并由后轮支撑杆协助使轮椅不断上爬。
当轮椅前轮(平地)到平地时,前轮继续向前,当后轮爬上一级台阶后,前轮锁死,后轮调节杆收缩,转动轴开始转动,轮椅开始下降直到座椅主体水平。
重复上述过程直到轮椅整体到达水平面,完成上楼的全部工序过程如图6~12所示。
3结束语
通过新型可上楼轮椅的设计研究,总结出了以下特点:(1)可上楼机构采用三角轮和弹簧结合的新型轮子,由后轮的运动与后轮调节杆的伸缩来改变轮椅整体的倾角,使得轮椅在楼梯上整体保持水平,使上楼过程更为轻松和安全;(2)座椅升降由轮椅的前轮(爬楼)、前轮调节杆与轮椅的后轮、后轮调节杆相配合,同时改变倾角使得轮椅整体上升。
产品的主要优势:(1)安装可上楼装置,解决轮椅上楼的困难,提高轮椅上楼的安全系数和舒适度,降低轮椅使用者上下楼时摔伤的机率,给独居老人和腿脚不便人士出行带来了便利;(2)安装座椅可升降装置,使用者可以无需下轮椅就能拿到高处的物品,能让使用者生活更方便;(3)市场前景广阔,人口老龄化越来越严重,腿脚不便人员数量不断增加,人们生活质量的提高导致对此类产品的需求大幅提升。
参考文献:
[1]李文华.中国人口老龄化预测[J].合作经济与科技,2020(4):178-179.
[2]何清华,黄素平,黄志雄.智能轮椅的研究现状和发展趋势[J].机器人技术与应用,2003(2):12-16.
[3]李睿.一种平地、楼梯两用助行装置的建模与设计[D].南京:南京理工大学,2009.
[4]陆丰勤.多功能爬楼梯装置的研究及控制系统的设计[D].南京:南京理工大学,2008.
[5]李冠群.爬楼轮椅的结构设计与轮履切换机构仿真分析[D].哈尔滨:哈尔滨商业大学,2021.
[6]徐俊翊.具有轮椅搭载功能的新型爬楼梯履带车设计与分析[D].南京:南京理工大学,2017.
[7]王丽娟.行星滚轮转换步行式驱动爬楼梯轮椅设计[D].苏州:苏州大学,2010.
[8]陈伟荣.新型爬楼梯轮椅的结构设计与研究[D].南昌:南昌大学,2018.
[9]孟祥雨.一种星轮式爬楼梯电动轮椅设计与研究[D].长春:长春工业大学,2012.
[10]王挺,王越超,赵忆文.多机构复合智能移动机器人的研制[J].机器人,2004(4):289-294.
[11]王纲,平雪良,肖竟成,等.具有爬梯功能的新型电动轮椅[J].机械制造.2021,59(10):37-39.
[12]阮超明,何玉林,唐国豪.电动智能爬楼梯轮椅的创新设计[J].装备制造技术,2020(12):199-201.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/48200.html