SCI论文(www.lunwensci.com):
摘要:为改善汽车的紧急避障性能,基于车辆的运动学特性分析与辨识,通过对不同避障场景的量化分析,提出了可行的转向允许曲线和制动允许曲线,兼顾安全和实时的车辆紧急避障控制策略。通过定义车辆避障过程中的事件风险因子和事件损害因子,采用时间-事件-流程模式分析整个车辆碰撞过程,并在PanoSim驾驶模拟器硬件在环实验平台分别进行了时速72km/h和90km/h车速避障行为测试,计算求解最终的避障风险概率。实验结果表明,根据建立的紧急避障控制策略框架,车速为72 km/h和90km/h的避障误差分别为0.051 1 m和0.052 4 m,其控制精度较高,自动驾驶汽车可以选择风险概率最小的路径进行避障,如果现有避障路径不可避免地会发生碰撞,则控制策略会选择使车辆碰撞损害最小化的路径方案。在紧急避障控制策略的作用下,车辆可以实现最佳的避障路线,并且可以保证车辆的行驶稳定性。
关键词:紧急避障;风险概率;控制策略;在环测试
An Emergency Obstacle Avoidance Control Strategy Considering the Ultimate Risk Probability
Liu Yihua,Kuang Jiakai
(Guangdong Technology College,Zhaoqing,Guangdong 526100,China)
Abstract:In order to improve the performance of vehicle emergency obstacle avoidance,based on the analysis and identification of vehicle kinematic characteristics,and through the quantitative analysis of different obstacle avoidance scenarios,a feasible control strategy for vehicle emergency obstacle avoidance with both steering allowance curve and braking allowance curve giving consideration to safety and real-time was proposed.By defining the event risk factor and event damage factor in the process of vehicle obstacle avoidance,time-event-flow mode was adopted to analyze the entire vehicle collision process,and the obstacle avoidance behavior tests of 72 km/h and 90 km/h speed were carried out on the hardware of PanoSim driving simulator in the loop experiment platform,respectively,to calculate and solve the final obstacle avoidance risk probability.Experimental results demonstrate that,according to the established emergency obstacle avoidance control strategy framework,the obstacle avoidance errors of vehicles at 72 km/h and 90 km/h are 0.051 1 m and 0.052 4 m respectively,which have high control accuracy.Autonomous vehicles can select the path with the lowest risk probability to avoid obstacles.If the existing obstacle avoidance path inevitably leads to collisions,then,the control strategy will choose the path scheme that minimizes vehicle collision damage.Under the action of the emergency obstacle avoidance control strategy,the vehicle can realize the best obstacle avoidance route and ensure the stability of the vehicle.
Key words:emergency obstacle avoidance;probability of risk;control strategy;the ring test
0引言
车辆的安全性一直以来都是关注的重点问题,目前的车辆基本都带有主动安全系统,能够提供包括自适应巡航、车道偏离预警、自动泊车等辅助驾驶功能。另外紧急避障功能作为提升车辆安全性的重要组成部分,也逐渐在主动安全系统中得到应用[1-4]。
针对车辆的紧急避障功能实现问题,国内外研究人员做了相关的研究分析。王凯[5]基于二次规划的模型预测控制算法生成安全的避障轨迹,提出了适用于自动驾驶汽车的实时避障方法。Song等[6]通过设置安全距离阈值和制定避障前的处理规则,提出了一种基于几何法控制转向的车辆避障策略。吴迪[7]基于人工势场法和弹性能带理论,提出了一种适应于车辆行驶状况的紧急避障路径生成方法。李勇[8]提出了一种同时优化转向和制动的避障算法,并采用非线性模型预测控制方法在线求解优化问题,可以有效提高避障算法的实时性。魏杰[9]根据车辆动力学模型,将紧急避障问题转化为从车辆当前位置以尽可能快的速度平滑收敛到下一个车道的最优轨迹生成问题,提出了基于非线性模型预测控制的车辆紧急避障策略。
但是,从现有的研究结果来看,缺乏对避障所需的路径选择方法和总体控制逻辑方面的分析,同时也没有制定出详细的紧急避障控制策略。因此,很有必要提出车辆紧急避障前的控制策略,以进一步改善车辆的避障性能。
本文分析了车辆与静态和动态障碍物行驶时的相关场景,定义了制动允许曲线和转弯允许曲线,并根据点质量模型和车辆参数生成可行的避障路径图。基于计算需求提出了事件风险因子和事件损害因子的概念,并给出了最终风险概率的计算方法。通过对可行避障路径图和最终风险概率进行事件流分类讨论,建立了车辆避障控制策略框架。基于上述定量化概率分析的避障控制策略,可以降低车辆与障碍物发生碰撞的概率。
1可行避障路径
由于车辆避障的过程本质上是一个时间-事件-流程的过程,因此本文将使用事件-流程模式来定义整个过程,并分析每种避障情况的可能性并计算最终的风险概率。
首先作如下假设:(1)通过传感器可以获取车辆和障碍物的相关信息;(2)车辆直行行驶,相邻车道无其他车辆;(3)路面附着系数已知。
下面将对静态障碍物场景和移动障碍物场景这两种典型情况进行分析。
1.1静态障碍物场景
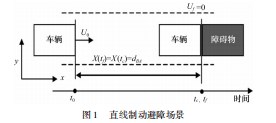
车辆通过制动进行避障的典型情况如图1所示。车速为U0的车辆与障碍物保持在同一车道,在不与障碍物发生碰撞的前提下,利用其最大的制动力完全停止。车辆初始速度U0与所需最小直行距离dBA的关系定义为制动允许曲线。
车辆通过换道进行避障的典型情况如图2所示,根据车辆与障碍物的相对行驶状况,可以计算出车辆完成换道且不与障碍物发生碰撞的最优避障行驶路径。其中,表示车辆转向所需的最小距离,tc表示所对应的时间。车速U0与所需最小转向距离dTA的关系定义为转向允许曲线。
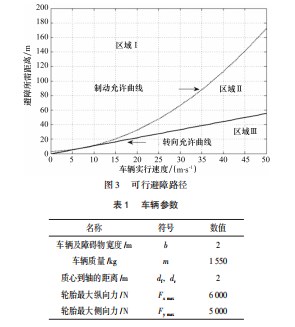
如图3所示,在车辆与障碍物之间的平面距离上同时绘制出制动允许曲线和转向允许曲线,便可形成避障可行路径图。转向允许曲线可以通过点质量模型和车辆的参数(表1)得到。李江湖[10]研究表明,点质量模型在估计允许转向曲线和近似紧急变道路径时具有较高的精度,可以作为轨迹规划的使用模型。通过在规划层采用较低精度的模型和在控制层采用较高精度的模型,能够平衡车辆的控制性能和计算速度之间的矛盾[11]。由于路面和轮胎之间的相互作用力对车辆的极限性能影响较大,本文根据确定的道路条件和恒定的路面附着系数来求解得到可行的避障调度路径。
由图3可知,两条曲线将整个平面的距离和车速划分为区域I、区域II和区域III。如果车辆处于区域I的状态,即当车辆检测到车道前方有障碍物时,其当前速度和与障碍物的距离用区域I中的点表示。此时车辆以当前速度行驶时,通过制动停止或者转向到相邻车道均可以保证车辆与障碍物不发生碰撞。如果车辆处于区域II的状态,只能通过换道的方式进行避障。如果车辆处于区域III的状态,此时车辆进行换道会导致偏置碰撞,车辆可能会失去控制,这种情况通常比正面碰撞更加危险。
1.2移动障碍物场景
车辆和障碍物处于同一车道时,移动障碍物场景分为两种情况:(1)车辆和障碍物沿同一方向行驶;(2)障碍物与车辆相向行驶。
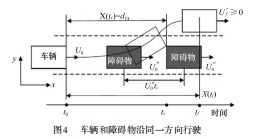
当车辆和障碍物沿同一方向行驶时,允许转向曲线分析情况如图4所示。此时可以用车辆与障碍物的相对速度U作为控制变量得到允许转向曲线,其中,U=U0-U,U0和U分别为车辆和障碍物的当前速度,由于本文讨论的是避障情况,所以有U0>U。制动允许曲线的分析与2.1节相似,此时U(tf)≤0,表示在最后时刻tf车辆和障碍物具有相同的速度或者车辆的速度小于障碍物的速度。
总体而言,这种情况下的可行避障路径与图3基本相同,只是将变量U0替换为U。区域I、区域II、区域III及其允许避障操作的结论相对于U保持不变。
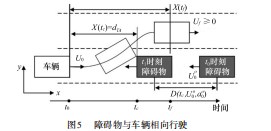
对于障碍物与车辆相向行驶的第二种情况,相关避障路径曲线如图5所示。在这种情况下,车辆唯一的选择是换道到相邻车道实现避障,避障成功与否取决于车辆完成所需换道的时间tc和障碍物的运动状态,同时也决定了该条件下的允许转向曲线。
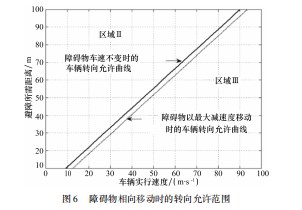
为便于估计车辆避障允许转向路径的界限范围,假设障碍物以当前速度U持续向车辆移动,该条件下的可行避障调度路径如图6所示,此时以相向速度U替代图3中的变量U0,相向速度U=U0+U,车辆模型和参数与图3的情况类似。考虑到障碍物有减速的可能,设定其最大加速度为6 m/s2。
由图6可知,如果车辆与障碍物的距离和相对关系属于区域II范围,则车辆可以完成避障操作。当车辆状态处于区域III范围内,此时无法完成避障操作,车辆与障碍物将发生碰撞。
图6障碍物相向移动时的转向允许范围
2计算最终风险概率
为了对车辆避障的过程进行定量分析,定义了两个量化因子,分别为事件风险因子Fr和事件损害因子Fd。事件风险因子Fr用于量化制动、转向等不同操作发生碰撞的可能性,事件损害因子Fd用来衡量碰撞发生后可能造成的人身伤害的严重程度。
从传感器获得车辆与障碍物之间的距离、车辆与障碍物的实时车速和加速度、障碍物的行驶方向等关键信息,根据这些信息可以计算出事件风险因子。

式中:D为初始时刻车辆与障碍物的距离;U0为车辆的初速度,换道时保持车辆的纵向速度不变;tc是车辆转向所需的时间;y(tc)为车辆在时间tc内的横向位移;m和Fy max分别为车辆质量和轮胎最大侧向力。
事件风险因子可由下式进行估计:

如果在时间tc处的横向位移大于或等于b,则车辆将完成车道变换,否则将发生碰撞,该方法同样适用于估计制动条件下的事件风险因子。
在碰撞事件中,速度被认为是造成损害的关键因素[12]。损害包括轻伤、重伤和致命伤。此外,不同的碰撞方式也会造成不同程度的损伤,如正面碰撞、追尾碰撞和侧面碰撞。根据比较分析和相关实验结果可知,碰撞事故中发生严重损害的概率更能准确评价事故造成的损害程度[13]。
根据动量定理,碰撞过程中速度的变化ΔU与损伤程度的关系比碰撞速度更密切[14]。本文讨论的是在直线道路上车辆前方有障碍物的场景,由此给出了如下所示的车速变化ΔU与车辆损伤严重程度之间的近似关系。
ΔU的计算方程为:

式中:m、mo分别为车辆和障碍物的质量;Uv、Uo为车辆和障碍物的碰撞速度;q为车辆行驶轴与障碍物的夹角,碰撞速度可以由车辆与障碍物之间的距离和障碍物的初始速度得到,由传感器获取碰撞角度q。
由式(5)可得车速变化ΔU的数值,则事件损害因子可表示为:

基于碰撞重构数据库,关于速度变化ΔU对两车碰撞严重性的影响已有大量的实验研究成果[15]。因此,本文基于美国NASS/CDS和CIREN数据库的大量碰撞数据,在图8中求解得到事件损害因子与速度变化ΔU的函数关系[16]。
由图8可知,当ΔU=0 km/h时,事件损害因子为0;当ΔU=20 km/h时,事件损害因子约为0.03;当ΔU=50 km/h时,事件损害因子约为0.8;当ΔU≥80 km/h时,事件损害因子为1。基于该函数曲线关系,可以准确得到事件损害因子与速度变化ΔU的关系。在实际车辆避障场景中,当速度变化ΔU已知时,可以通过查表法得到相应的事件损害因子。
通过以上提出的两种方法,可以得到每个避障路径的事件风险因子和事件损害因子。为了更准确地评估车辆避障的风险情况,本文以事件风险因子与事件损害因子的乘积作为最终的风险概率,如式(7)所示:

当传感器检测到前方有障碍物时,控制器开始计算每种避障路径的最终风险概率,通过比较选择具有最低风险概率的避障路径。
3控制策略
根据以上的计算分析得到车辆的可行避障路径和最终的避障风险概率,本节将基于不同避障操作方式进行事件流分析,建立避障控制策略的框架。
3.1与车辆同向行驶的障碍物场景
本文将探测到障碍物的车辆响应操纵作为基本操纵,以BM1(0)表示第i个基本操纵,起始时间t0=0。
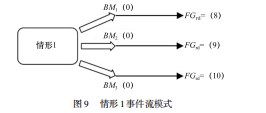
对于图9中的情形1,车辆与障碍物的关系如图3中的区域I所示。车辆的可选操作如下:BM1(0):立即改变车道;BM2(0):立即制动并完全停止;BM3(0):继续行驶,车辆与障碍物的状态关系进入II区,然后进行换道。对每种可选操作的最终风险概率分析如下。
(
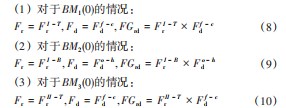
式中:F-T表示区域I转向操作的事件风险因子;FI-T表示区域II转向操作的事件风险因子;F-B表示区域I制动操作的事件风险因子;F-c表示发生偏置碰撞时的事件损害因子;F-h表示发生头部碰撞时的事件损害因子。
通过分析计算可以得到3种不同选择的最终风险概率,如果只考虑车辆避障的安全性,则选择最终风险概率最小的操作方案。同时还需要考虑其他因素,比如在情形1条件下,3种操作的最终风险概率都非常小,虽然都可以实现车辆的避障,但是BM3(0)操作方案具有更好的舒适性。在保持足够的安全换道距离的前提下,车辆可以与障碍物接近行驶,以提高道路的通行效率。因此,当有多种选择可以实现避障时,可以结合其他的驾驶规则进行判断。
对于图10中的情形2,车辆与障碍物的关系为图3中的区域II。车辆可选操作:BM1(0)为立即换道;BM2(0)为立即制动并尽可能使车辆完全停止。
对每种操作的最终风险概率分析如下。

式中:FI-T和FI-B分别为区域II中转弯操作和制动操作的事件风险因子。如果给定了车辆与障碍物之间的距离和障碍物当前的速度,则可以得到两种选择的最终风险概率。根据区域II的定义,采用BM2(0)的操作方案利用制动力在与障碍物碰撞前停止几乎是不可能的,其风险概率很高。因此,车辆选择BM1(0)的操作方案进行避障。
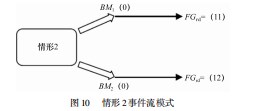
对于图11中的情形3,车辆与障碍物的关系为图3中的区域III。车辆可选的操作:BM1(0)为立即换道;BM2(0)为立即制动并尽可能使车辆完全停止。
对每种操作的最终风险概率分析如下:
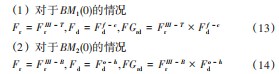
式中:FII-T和FII-B分别为区域III中转弯操作和制动操作的事件风险因子。通过计算分析可知,这两种操作均无法完成车辆避障行为,即FII-T≈1和FII-B≈1。此时,事故伤害因子将最终决定采用何种操作方案,以减轻事故造成的损害结果。与BM2(0)的操作相比,BM1(0)操作会产生偏置碰撞(θ>0),BM1(0)操作的事件损害因子更大,这也符合实际的车辆碰撞结果,所以应该选择BM2(0)操作方案进行避障。
3.2障碍物位于车辆前方并向车辆移动
根据图6的可行避障路径分析结果,此时车辆与障碍物的关系只有区域II和区域III两种情况。当车辆与障碍物的关系处于区域II时,显然不能通过制动来实现避碰,此时情形2类似,可以采用换道方式进行避障。当车辆与障碍物的关系处于区域III时,则与情形3类似,参照其方案进行处理。通过计算分析可知,由于设定变道时纵向速度不变,所以此时发生碰撞时碰撞速度较大。
3.3紧急避障控制策略
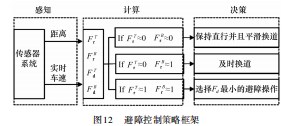
根据前述的车辆避障分类讨论结果,建立相应的避障控制策略框架,使得最终的风险概率FGrd最低或者减轻车辆的碰撞受损程度。
由最终事件风险概率的计算式FGrd=Fr×Fd可知,如果可以成功完成车辆避障行为,则其对应的最终风险概率FGrd=0。当车辆无法进行避障时,Fr接近于1,事件损害因子将决定最终的风险概率值,此时选择使车辆碰撞损害最小的操作方案。
避障控制策略框架如图12所示,本文所提出的避障控制策略:如果转向和制动操作的事件风险因子接近于0,即FrT≈0,F≈1,则可行避障路径为车辆以该车速继续行驶然后平滑换道;如果FrT≈1并且F≈1,则可行避障路径为车辆及时进行换道操作;如果FrT≈1并且F≈1,事件损害因子Fd决定最终风险概率FGrd的值,则可行避障路径为事件损害因子最小的避障操作。
4驾驶模拟器硬件在环实验验证
在制定出车辆的紧急避障控制策略后,为了验证本文所提出避障策略的有效性,在PanoSim驾驶模拟器硬件在环试验平台中创建相关实验工况,进行了不同车速工况下的系统避障性能测试。
4.1搭建硬件在环测试场景
4.1.1创建实验车辆
如图13所示,在PanoSim软件的车辆编辑器中设置车辆自身参数并创建基本实验场景。
4.1.2设置实验工况
(1)建立实验环境
PanoSim平台中,可以配置多种实验环境,可以模拟车辆在多种天气下的行驶过程。本文以晴天天气为例,进行紧急避障工况驾驶模拟器硬件在环实验。
(2)配置实验参数
本文实验工况过程中,根据紧急避障的需求,设置路宽为16 m、双向2车辆的长直道路,模拟车辆遇到障碍物和多车干扰等场景。车上安装有毫米波雷达,车辆沿着内侧车道行驶。实验核心要素配置见图14。
(3)设置模型
设置雷达模型和AEB控制模块,使得AEB控制模块以车辆自身速度、障碍物相对距离和车辆档位信号为输入,计算出障碍物的运动状态,当车辆与目标障碍物发生碰撞可能时,由紧急避障控制策略层发出避障指令,实现车辆的自动紧急避障控制。
4.2驾驶模拟硬件在环验证
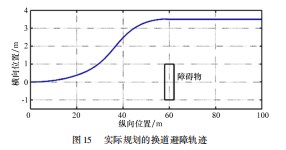
根据车辆避障场景规划出换道避障轨迹,并通过拟合的方法将规划的轨迹以多项式形式输入到驾驶模拟硬件在平台,生成如图15所示的换道避障轨迹。
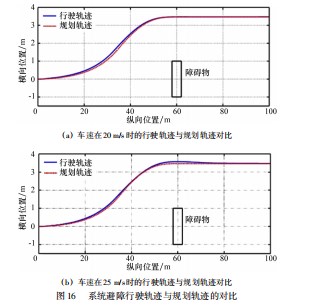
由图16的测试验证结果可知,本文提出的紧急避障控制策略可以使车辆在不同车速下沿着避障轨迹实现最佳的避障行为,可以有效提高车辆的安全性能,同时保证车辆的行驶稳定性。
不同车速情况下的横向位置误差结果如表2所示。由表可知,25 m/s车速下的横向避障误差为0.052 4 m,其结果略高于20 m/s车速下的横向避障误差0.051 1 m,表明车速的提高会使得避障控制精度的误差增大,降低车辆的避障精度。
5结束语
本文基于车辆的运动学特性分析与辨识,通过对不同避障场景的量化分析,提出了一种兼顾安全和实时的车辆紧急避障控制策略,并在PanoSim驾驶模拟器硬件在环实验平台进行了避障行为测试,得出如下结论。
(1)通过定义的车辆转向允许曲线和制动允许曲线,可以建立车辆的紧急避障路径,能够为车辆的避障分析提供理论支撑。
(2)提出了事件风险因子和事件损害因子的估计方法,能够计算出发生碰撞事故的最终风险概率,根据最终风险概率,可以分类讨论出紧急避障的不同场景。
(3)针对算法流程控制的实时性需求,建立了紧急避障的控制策略框架,PanoSim驾驶模拟器硬件在环测试结果表明,可以实现对车辆避障行为的精确控制,能够使车辆做出紧急情况下的最佳避障行为。
参考文献:
[1]李海青,赵又群,林棻,等.汽车高速紧急避障路径跟踪与主动防侧翻控制[J].哈尔滨工业大学学报,2019,51(7):135-143.
[2]张东亚.考虑最终风险概率的自动驾驶避障系统研究[D].南京:东南大学,2019.
[3]Umar Zakir Abdul Hamid.A Safe-Distance Based Threat Assess⁃ment with Geometrical Based Steering Control for Vehicle Colli⁃sion Avoidance[J].Journal of Telecommunication,Electronic and Computer Engineering,2016,47(11):153-164.
[4]高奇.无人驾驶自主代客泊车路径规划与跟踪控制策略研究[D].西安:长安大学,2019.
[5]王凯.基于模型预测控制的换道辅助系统研究[D].合肥:合肥工业大学,2018.
[6]Xiaolin Song.Vehicle Path Planning in Various Driving Situa⁃tions Based on the Elastic Band Theory for Highway Collision Avoidance[J].Journal of Automobile Engineering,2013,34(9):1706-1722.
[7]吴迪.自动紧急制动系统防碰撞控制策略研究[D].锦州:辽宁工业大学,2018.
[8]李勇.基于激光雷达的智能车横向避障研究[D].长沙:湖南大学,2017.
[9]魏杰.汽车主动前轮转向的控制策略研究[D].北京:北京理工大学,2015.
[10]李江湖.自动驾驶电动汽车避障控制方法研究[D].南京:东南大学,2015.
[11]崔佳超.无人驾驶智能车在动态环境中的避障方法[D].西安:西安工业大学,2015.
[12]洪达明.智能车辆主动避障系统设计与实验研究[D].合肥:合肥工业大学,2015.
[13]贾瑞.基于滚动优化的自主驾驶车辆避障控制[D].长春:吉林大学,2014.
[14]喻再涛.高速公路环境中基于预测控制的自主车辆避障控制[D].长春:吉林大学,2012.
[15]Chris Jurewicz.Exploration of Vehicle Impact Speed-Injury Se⁃verity Relationships for Application in Safer Road Design[J].Transport Research Arena,2016,24(7):4247-4256.
[16]Bahouth G.The Benefits and Tradeoffs for Varied High-Severity Injury Risk Thresholds for Advanced Automatic Crash Notifica⁃tion Systems[J].Traffic Injury Prevention,2014,12(9):134-140.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/47373.html