SCI论文(www.lunwensci.com):
摘要:随着电力系统的迅猛发展,输电线缆的人工巡检工作日益繁重,输电线缆通常架设于环境复杂、人口密集的地区,这给线缆的输电安全和日常维护带来很多困难,采用智能化机器人技术代替人工巡检方式已成为国内外研究热点。针对目前输电线缆工作时可能出现的问题,设计一种输电线缆多功能巡检机器人。首先对机器人系统的整体方案进行设计,确定机器人行走装置、涂胶装置和线缆监控装置的结构设计,以及机器人控制系统与地面监控系统构成的控制方案;然后对机器人的机械结构进行了深入研究和分析,包括驱动机构、涂胶机构、支撑机构,论证了涂胶机构的可行性;最后建立了机器人的样机模型,研制了相应的样机,对机器人的各个机构进行分析,也对机器人上下坡爬行受力情况和稳定运行的条件进行分析,增强了机器人的巡检稳定性。通过深入分析巡检机器人的总体设计方案,论证了该设计方案的可行性和可靠性。
关键词:输电线缆;巡检机器人;电力系统;多功能维护
A Multi-functional Inspection Robot for Transmission Line
Guo Yan,Zhang Yu,Zhang Yaju
(School of Intelligent Transportation,Nanjing Vocational College of Information Technology,Nanjing 210023,China)
Abstract:With the rapid development of power system,the manual inspection of transmission cables is becoming increasingly heavy.Transmission cables are usually erected in areas with complex environment and dense population,which brings many difficulties to the transmission safety and daily maintenance of cables.The use of intelligent robot technology instead of manual inspection has become a research hotspot at home and abroad.Aiming at the possible problems in the current work of transmission cable,a multifunctional inspection robot for transmission cable was designed.Firstly,the overall scheme of the robot system was designed to determine the structural design of the robot walking device,gluing device and cable monitoring device,as well as the control scheme composed of the robot control system and the ground monitoring system.Then,the mechanical structure of the robot was deeply studied and analyzed,including driving mechanism,gluing mechanism and support mechanism,and the feasibility of gluing mechanism was demonstrated.Finally,the prototype model of the robot was established,the corresponding prototype was developed,the various mechanisms of the robot were analyzed,and the force and stable operation conditions of the robot climbing up and down the slope were also analyzed,so as to enhance the stability of the robot.Through in-depth analysis of the overall design scheme of the inspection robot,it is demonstrated that the design scheme is feasibility and reliability.
Key words:transmission cable;patrol robot;power system;multifunctional maintenance
0引言
随着电力系统的迅猛发展,输电线缆的人工巡检工作日益繁重。输电线缆是电力系统的主要环节,其安全性和稳定性直接影响着电力系统的可靠性[1]。长期暴露在野外的输电线缆很容易发生例如线缆履冰、线缆外力破坏、绝缘层氧化脱落等状况,尤其在严冬及初春季节,我国云贵高原、川陕一带及两湖地区常出现雾凇和雨凇现象,造成架空输电线缆覆冰,线缆舞动、闪络、烧伤,甚至断线倒杆等问题,从而导致电网结构损坏引发线路故障,不仅对电力系统的安全运行产生严重威胁,同时也对居民的人身安全和财产安全产生巨大的影响[2]。因此,需要定期对输电线缆进行巡检和维护,了解输电线缆的实际情况,及时发现并消除存在的安全隐患,预防事故发生,目前输电线缆的巡检方法主要包括传统的人工巡检和直升机巡检。人工巡检依靠电力工人在线缆上行走,通过肉眼对线缆及线缆的辅助设备进行检查,这种巡检方法工作量大,巡检周期长,效率低;直升机巡检是由工作人员通过机载摄像设备观察线缆外部情况,检查线缆状况,这种方法的巡检视野不易控制,容易忽略故障点,且巡检成本高,难以大范围推广使用[3]。
巡检机器人的研究始于20世纪80年代末,近年来逐渐成为研究热点。目前巡检机器人的关键技术已经趋于成熟,如机构、控制、通信、绝缘、电磁兼容等[4],国内外研究团队研制出了多种类型的样机,并开展了带电检测与维护作业的实验,研究领域从输电拓展到变电、发电及配电,从巡检型机器人拓展到检测、维护作业型电力机器人[5]。对于架空输电线缆巡检作业机器人的研究,主要集中在日本、美国、加拿大等国[6]。加拿大魁北克水电研究院发明的“LineScout”机器人,可通过使用遥控方式,沿735 kV导线行进及跨越障外物,越障能力较强。日本东京大学在2009年研制的“Expriner”电力机器人,其机身结构使用碳纤维材料,由通过T型结构支撑的两对轮组,配重机构及具有2个自由度的作业臂等部件组成,可在500 kV的4分裂导线上行走。美国电力科学研究院研制的“Ti”巡检机器人挂载可见光摄像机和红外成像仪设备,可借助安装在导线上的过桥系统跨越警示球,防震锤等障碍物,能运行在756 kV的线缆上,最高时速达8 km/h,可使用内部电池供电。
近几年来,针对国内电力公司对巡检作业机器人的需求,国内许多高校和研究所都组织研发了具有自主知识产权的超高压输电线缆故障巡检机器人、绝缘瓷瓶带电清扫机器人、高压输电线缆带电检修机器人等电力作业机器人,并在电力系统中投入了使用[7]。沈阳自动化研究院在2006年研制的高压线缆巡检机器人系统,该系统由巡检机器人和地面移动基站组成,采用遥控和局部自主结合的控制方式,可携带可见光摄像机或红外热成像仪等设备,能够在500 kV超高压输电线缆上沿线自主行走,并跨越线缆上的防振锤、线夹及压接管等障碍。武汉大学研制的两臂巡检机器人,可以在输电导线上滚动和爬行,自动跨越或避让防振锤、直线夹、压接管、耐张线夹等障碍物。哈尔滨工业大学在2010年研制了高压线除冰巡检机器人,能除掉8~15 mm线径上包裹的直径达60 mm的冰柱,最高速度可达750 m/h,最大爬线坡度为30°。
随着机器人技术的持续发展,越来越多的机器人应用到日常生活。本设计针对目前输电线缆工作时可能出现的一些状况和故障,设计一种高压输电线缆多功能维护机器人,用于输电电缆的日常巡检和特殊自然灾害条件下线缆的除冰、涂胶等检修工作,从而代替人工作业,降低操作风险,提高输电线缆的工作寿命和送配电安全。
1巡检机器人总体设计
巡检机器人进行输电线缆巡检作业前,由辅助工具或人工爬到杆塔上以吊装的方式将机器人安放到线缆上,机器人本体控制系统在接收到地面监控系统发送的指令后,开始进行线缆巡检作业[8]。首先,清洁刷在行驶过程中清理电缆,夹板前端的摄像头实时拍摄到线缆的外表面情况,如果遇到线缆绝缘层脱落的地方,蠕动泵将绝缘涂料通过柔性导管输送至绝缘涂料注头,涂抹绝缘层损坏部位,涂抹完后烘干风扇工作,对涂抹过的地方进行烘干操作。
1.1机械结构
合理的机械结构是机器人实现功能的基础和关键,机械结构设计不仅要考虑驱动和工作方式,同时还要兼顾系统的灵活性、稳定性和可靠性[9]。巡检机器人的工作环境为架空输电线缆,如图1所示,线缆的承受能力有限,所以要求机器人结构轻便。巡检机器人的重量来源于机械结构装置、电池装置和传感器装置,在综合考虑了耐腐性、强度以及整体重量之后,选择用环氧板和工程塑料材料来制作巡检机器人的行走装置和悬挂箱,既保证了结构强度又使得机器人整体重量最小。机器人在架空线缆上行走,负责对输电线缆进行检查和维护,因此巡检机器人要具备一定的爬坡能力,即使线缆有一定的坡度,也可以稳定行走[10]。
巡检机器人的机械结构设计主要包括机器人的行走结构设计和作业系统设计。当巡检机器人在线缆上行走时,为了使机器人保持稳定的行走状态,避免发生机器人左右晃动而造成坠落的情况,将行走结构设计为悬挂式行走,由两个U型槽轮和一组张紧轮组成,选择使用两个悬挂臂,将整体结构稳定在线缆上,驱动轮使机器人能够在电缆上平稳行驶,张紧轮使整个结构免受到外界影响,紧贴在电缆上[11]。
作业系统由悬挂箱、两个左右两片夹板及滑轨组成。悬挂箱内设置有电池、控制板、绝缘胶储料箱,夹板上配置清扫刷、绝缘涂料注头、烘干风扇,蠕动泵和柔性导管连接至绝缘涂料注头。基于SolidWorks建立机器人结构模型如图2所示,结构由蠕动泵、涂胶注头、夹板和导轨、驱动轮、清扫刷、悬挂箱组成。
1.2行走装置
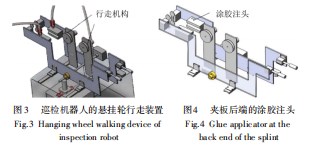
如图3所示,本设计的巡检机器人有两条悬挂臂,为了简述巡检时具体的工作过程,将第一个悬挂臂称为前挂臂,第二个悬臂称为后挂臂,两个悬挂臂上都安装有驱动电机,使得机器人在线缆上的行走速度可控。巡检机器人在线缆上行走时,两个电机带动行走轮转动,依靠轮子与线缆接触处产生的摩擦力前进,可以爬上倾斜度为30°左右的电缆。在行驶过程中清洁刷负责清洁电缆,夹板前面的摄像头实时拍摄到线缆的外表面情况,将画面传给地面工作人员。
1.3涂胶功能
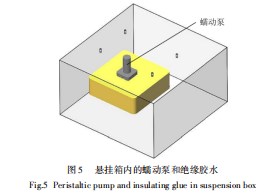
本设计在机器人巡检功能的基础上加装了涂胶装置,如图4所示,夹板后端安装一对涂胶注头,悬挂箱内放置了蠕动泵和绝缘胶水。在机器人巡检过程中,如果遇到绝缘层脱落的地方,工作人员远程控制开启悬挂箱内蠕动泵,将绝缘胶水通过柔性导管输送至绝缘涂料注头,涂抹绝缘层有损坏的部位,涂抹完成后烘干风扇对涂抹过的地方进行烘干。在不需要涂胶时,可将涂胶装置卸掉,以减轻巡检机器人整体重量。
1.4主要性能参数
为实现上述设计功能,巡检机器人需携带线缆检测设备和涂胶设备,机器人的主要性能参数如表1所示。
2巡检机器人控制系统设计
2.1控制系统
控制系统主要由蓝牙无线模块、Arduino控制板、电机驱动模块组成,控制系统通过处理各单元执行信号,管理工作流程,完成行走机构的驱动电机控制和涂胶系统的蠕动泵执行动作。机器人控制系统框架如图6所示。
2.2蓝牙无线模块
蓝牙无线模块是指集成蓝牙功能的芯片基本电路集合,用于短距离无线通讯、无线网络通讯、数据传输和远程控制,通信使用异步串口实现,蓝牙信号的收发采用蓝牙模块实现[12]。本设计采用主从一体的HC-05蓝牙串口模块是一种集成蓝牙功能的PCBA板,如图7所示。
该蓝牙模块的所有功能都是通过AT指令集控制,用手机就可以进行连接。在Android操作系统使用蓝牙串口App,首先打开手机的蓝牙设置,搜索并匹配蓝牙模块,然后进入键盘模式,在键盘的界面进行编辑输入到Ardu‐ino的机器人动作信号按钮,机器人指令操作界面如图8所示。
2.3 Arduino控制模块
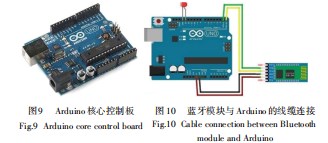
该系统采用的核心控制板是Arduino Uno开发板。如图9所示,这种开发板可以使用现有的电子元件,例如开关、传感器、LED、电机等。开发板上的微控制器可以通过Arduino编程语言来编写程序,蓝牙模块与Ardui‐no的连接方式如图10所示。
2.4控制程序
Arduino的编程软件是通过Arduino编程语言和Ardu‐ino开发环境来实现的,也可以借助于Arduino和其他一些在PC上运行的图形化编程软件,如S4A、Mblock、Mixly等。本设计所用的编程软件是Arduino,软件编程界面如图11所示。
Arduino的编程语言主要是C/C++语言,目前最新的Arduino核心库采用C与C++混合编写而成,图12所示为本设计的部分设计编程。
2.5图像采集模块
机器人使用摄像头来检测线缆表面绝缘层。摄像头采用的是FPV 500万像素高清摄像头,如图13所示。图像信息可通过WiFi无线网络实时传输视频到手机或者电脑上,其中摄像头安装在夹板前端,可根据实际情况,调节摄像头与线缆的检测距离。
摄像头迷你轻便,可安装在各种场合使用,WiFi无线网络可将720P画面实时传输至移动设备中,让地面工作人员清楚观察线缆表面绝缘层破损情况。如果遇到绝缘层破损的地方,工作人员可启动涂胶功能,进行破损部位的涂胶工作。
3巡检机器人力学分析
输电线缆在工作状态中,有一定的弹性和柔性,并且受地形、气候的影响,其物理特性也会发生改变,所以巡检机器人在线缆上运动时的状态十分复杂[13],为了使机器人能够在线缆上平稳行走,将从理论与动力学仿真的角度对机器人的结构合理性进行验证[14]。机器人在线缆上行走时,由于自身重力和高架塔的影响,机器人在线缆上就会形成上坡和下坡过程,假设行走线缆的坡度为30°。
3.1上坡和下坡受力分析
输电线缆的弹性和柔性都比较大,两个高架塔之间的线缆跨度也比较大,这使得线缆处于“两端高,中间低”的悬垂状态,机器人在线缆上就会形成上坡和下坡两种情况,为了能让机器人在线缆上稳定的通过这两种路况,对机器人在上坡和下坡的受力情况进行分析。
3.1.1上坡时的受力分析
机构爬上坡时的受力分析如图14所示。Fa1、Fa2是线缆对驱动轮的反向作用力;Fb1、Fb2是驱动轮对线缆的反向作用力;F1、F1'是线缆对驱动轮的作用力;F2、F2'是驱动轮对线缆的作用力;F1和F2、F1'和F2'分别是一对作用力和反作用力;T1和T2为电机的驱动力矩;G1和G2为机构对线缆的重力。
首先对向上爬坡和传动机构的力学进行综合分析,由力和力矩的平衡条件可得到力和力矩的平衡方程为:

3.1.2下坡时的受力分析
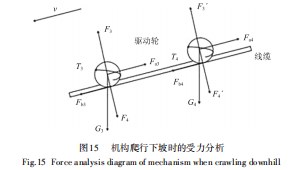
机构爬下坡时的力学分析如图15所示。Fa3、Fa4是线缆对驱动轮的反向作用力;Fb3、Fb4是驱动轮对线缆的反向作用力;F3、F3'是线缆对驱动轮的作用力;F4、F4'是驱动轮对线缆的作用力;F3和F4、F3'和F4'分别是一对作用力和反作用力;T3和T4为电机的驱动力矩;G3和G4为机构对线缆的重力。
同样对向下爬坡和传动机构的力学进行综合分析,由力和力矩的平衡条件可得到力和力矩的平衡方程为:

式中:r为轮子的半径;μ为滚动摩擦因数;θ为线缆的坡度,此处取值为30°。
3.2稳定爬行受力分析
机器人在线缆上行驶过程中,需要不断克服自身重力和驱动轮与线缆之间的摩擦力,所以要求电机必须产生足够大的驱动力矩[15]。机器人正常行驶的条件是驱动力矩必须大于或等于行驶阻力,当机器人稳定爬行时,可以得到如下方程:

但是机器人驱动轮与线缆的接触方式是非常紧密的,使得线缆对于驱动轮的摩擦阻力是有限的。当增大驱动轮的驱动力矩时,会使驱动轮的转速增加,而线缆对于驱动轮的摩擦阻力不会增加,这时驱动轮会出现打滑现象。线缆对于驱动轮的摩擦阻力的极限值称为附着力F小。小为附着系数,它与线缆对驱动轮产生的摩擦力成正比,即F小=F2小,为了保证不出现打滑现象,线缆对驱动轮的摩擦力Fa1应小于F小,所以驱动轮向上爬行的条件是:
 4实验及结果分析
4实验及结果分析
在完成巡线机器人机械结构和控制系统设计的基础上,对制作好的巡线机器人(图16)进行功能测试,验证巡线机器人能否按照设计要求执行行走功能。选择直径为15 mm电缆线在实验室模拟实际现场情况,搭建的架空地长为3 m,距地面高度为70 cm。图17所示为巡线机器人在线上行走测试实验场景,巡线机器人可以在线上平稳行走,行走的平均速度为0.5 m/s,最大爬坡角度15°。
5结束语
本文以输电线缆运行维护作为研究对象,设计巡检机器人的功能技术指标,结合高压输电线缆身处的特殊环境状况,确定机器人的总体设计方案,研制出一种可以在高压输电线缆上对单根线缆进行巡检和对绝缘层破损部位涂胶的巡检机器人,主要完成以下几个方面的工作。
(1)完成巡检机器人系统的总体方案设计,包括硬件设计和软件设计。确定了机器人行走装置、涂胶装置和线缆监控装置的结构设计,以及机器人的控制系统与地面监控系统构成的控制方案,并且对结构设计和控制方案进行了详细说明。
(2)完成对主体机器人的机械结构设计,包括驱动机构、涂胶机构、支撑机构,论证了涂胶机构的可行性,并通过分析确定了线缆绝缘层监控设备的适用范围。
(3)基于SolidWorks建立了巡检机器人的样机模型,并且研制了相应的样机,对机器人的各个机构进行分析,也对机器人上下坡爬行受力情况和稳定运行的条件进行分析,增强了机器人的巡检稳定性。
(4)完成了巡检机器人控制系统方案的设计,设计了控制系统的拓扑结构方案。其中,机器人控制系统采用以Arduino开发板为核心,搭配L298N电机驱动的控制结构,地面监控系统采用了FPV 500万像素高清航拍摄像头,工作人员可以实时观察到线缆的表面情况,方便控制线缆上的机器人。
目前已设计出巡检机器人的功能样机,可以实现输电线缆的巡检和涂胶功能,后续需要在此基础上优化结构,改进控制系统,减轻装置重量,增加功能。下一步的研究工作如下:
(1)增加夹紧结构,使机器人在线缆上运行更加稳定;
(2)增加自主越障功能,实现机器人的智能化;
(3)进行机器人工程样机的制造,并结合实际工作情况完善机器人的设计。
参考文献:
[1]苗俊,尤志鹏,袁齐坤,等.智能巡检机器人研究现状与发展[J].设备管理与维修,2019(24):99-100.
[2]周自更,赵小萌,解建华,等.输电线路智能巡线机器人的研究及应用[J].电气技术与经济,2019(6):44-46.
[3]冯晨光.高压输电线路巡检机器人机构设计及作业性能仿真研究[D].南京:东南大学,2020.
[4]梅雪川,葛光军,林粤科,等.涂胶机器人技术现状与发展趋势[J].现代制造技术与装备,2016(1):159-160.
[5]黄荣舟,李炳川,陈果,等.一种高压线巡检机器人的设计研究[J].机电产品开发与创新,2015,28(3):20-22.
[6]封尚.输电线缆巡检机器人系统研究与开发[D].南京:南京航空航天大学,2014.
[7]吴锴,左兆陆,窦少校.我国轨道式巡检机器人研究及发展现状[J].软件,2018,39(11):80-83.
[8]刘贞瑶,高方玉,高安洁,等.一种输电线路智能巡检机器人的仿真设计[J].电气技术,2019,20(12):41-45.
[9]周风余,吴爱国,李贻斌,等.高压架空输电线缆自动巡检机器人的研制[J].电力系统自动化,2004(23):89-91.
[10]张惠.悬挂式巡检机器人的设计与实现[D].苏州:苏州大学,2015.
[11]吴竹溪,李波,路冬,等.涂胶机器人移动机构装夹布局的递推优化算法[J].中国机械工程,2014,25(15):2037-2043.
[12]韩耀廷,赵志梅,郝晓宇,等.变电站巡检机器人路径规划智能算法优化[J].内蒙古电力技术,2021,39(6):58-61.
[13]何缘,吴功平,肖华.高压输电线路巡检机器人机构设计及运动学分析[J].高压电器,2016,52(6):61-68.
[14]封尚,章合滛,薛建彬,等.线缆巡检机器人机械结构设计及动力学分析[J].机械与电子,2013(12):70-74.
[15]张毅治.输电线缆多缆同步除冰机器人及运动特性研究[D].哈尔滨:哈尔滨工程大学,2013.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/46723.html