SCI论文(www.lunwensci.com):
摘要:在路政施工特别高速公路的养护工作中,必然会使用到交通锥。现有的养护人员在摆放交通锥时通常使用人工摆放的方式。该方式在小范围养护工作中无可厚非,但当需要进行大范围养护时,人工摆放将会非常不便,且在车流密集的区域或高速公路上,会造成非常大的安全隐患。基于上述原因,介绍一款液压式半自动交通锥收放系统的设计,该系统需要安装于工程车辆上,通过示例的系统结构设计及电路逻辑设计,使车辆在行进时系统通过自动检测交通锥的状态,根据系统参数设置控制液压系统运行从而驱动交通锥拾取摆臂的动作来实现交通锥的收放,该设计已在试制样品中实现,经测试可有效提高道路养护和交通维护等交通锥收放时的安全性和效率。
关键词:液压系统;交通锥收放系统;道路养护;交通维护
Design of Hydraulic Semi-automatic Traffic Cone Collection and Release System
Yu Xiaoli,Liang Zhuyang,Lin Xiaowei
(Guangdong Institute of Electronic Technology,Guangzhou 510630,China)
Abstract:Traffic cones are bound to be used in road administration construction,especially in the maintenance of highways.The existing maintenance personnel usually place the traffic cones manually.The method is understandable in small-scale maintenance work,but when large-scale maintenance is required,manual placement will be very inconvenient,and in areas with dense traffic flow or highways,it will cause great safety hazards.Based on the above reasons,the design of a hydraulic semi-automatic traffic cone retraction and release system was introduced.The system needs to be installed on engineering vehicles.Through the example of system structure design and circuit logic design,the system could automatically detect the state of the traffic cone when the vehicle was moving,controled the operation of the hydraulic system according to the system parameter settings,and drove the action of the pick-up arm of the traffic cone to realize the retraction and release of the traffic cone.The design realizes in the trial production sample,and it can effectively improve the safety and efficiency of the traffic cone during the collection and release of road maintenance and traffic maintenance.
Key words:hydraulic system;traffic cone collection and release system;road maintenance;traffic maintenance
0引言
目前,国内很多道路、机场、停车场等场所进行道路养护,交通维护等需要交通导改作业时,都是依靠人工摆放交通锥的方式来进行区域标识,不少作业都是不封路的情况下施工,施工作业开始前,通常是四五个身穿安全服的施工人员,有人拿着反光棒提醒过往车辆,其他人员抱着交通锥边走边摆,作业十分不便。尤其是在车流量大的城市快速路上进行交通作业等,需要沿路摆放大量交通锥时,人工摆放交通锥看似非常简单,却存在着危险性大、伤亡事故多、作业效率低以及交通锥间距不均匀等很多问题。另外,由于摆放及回收均需人工操作,所需面对的隐患成倍增加。
我国现有的交通锥一些自动化的收放系统部分是使用拖挂车设计[1]或箱式车加托臂实现[2]。上述实现方式对于现场操作人员并不是特别友好,部分设计仍需人员紧跟车辆,虽能提高摆放效率,但并未完全解决上述安全隐患。因此设计一种实现方式更加简单,安装及使用更加便利的交通锥自动收放系统,使交通锥的布放作业能够自动机械化完成,作业人员只需在驾驶室和车厢内进行简单的操作,无需下车跟随。该系统不仅可以极大地提高交通锥布放的速度,而且可以很好地保护道路维护人员的生命安全,对提高我国高速公路系统维护与管理水平有着深远的现实意义和良好的社会意义。
1系统组成
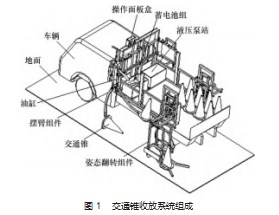
系统主要由机架、安装在机架上的摆臂组件、姿态翻转组件以及电控部分组成[3]。如图1所示。
(1)机架。机架乘载了所有部件的安装以及与工程车辆之间的固定。
(2)摆臂组件。主要由可沿滑道移动的摆臂支架、液压油缸[7]、摆臂、锥托及传感器等组成。锥托上位时与车厢底部平齐,便于操纵人员放锥,锥托运动到下位时,可将交通锥横放于路面上,等待姿态翻转机构的操控。传感器来检测有无交通锥放置,告知控制电路是否控制油缸动作摆臂组件可以完成将交通锥拾起和放下的动作。姿态翻转组件能够将交通锥翻转90°,由倒翻转为立,反之亦可。
(3)电控部分。该部分包括操作台、液压泵站、蓄电池组、及控制器等部分组成。电控部分整体物理框架如图2所示。
(4)姿态翻转组件[4]。该组件完成交通锥的姿态调整,放锥时在其半圆弧作用下使横躺的锥直立完成放锥,收锥时在其半圆弧的作用下使直立的锥躺倒,变换姿态后供锥托拾取。
(5)液压泵站与液压油缸组成摆臂运动驱动系统,蓄电池提供能源供给。此外还有车速检测及报警。利用安装在车辆底板上的安全轮配合接近传感器检测行车速度。
操作台是设备的人机界面,放在作业人员方便操作的位置,具有工作模式调节开关(钥匙开关)、交通锥放置间距设置开关、手动操作杆、电池电量显示、急停关断按钮等。电池及充放电管理模块、控制核心、油泵及换向阀全部安装于电控箱内,可集中管理,便于维护。
2系统工作原理及设计
本节将主要围绕电控部分的系统原理进行介绍。
2.1电源部分
系统采用24 V 210 AH电池组供电,为了使设备能在紧急情况下制动,并且系统启动需要有钥匙授权,电池组输出经过电源接触器给控制电路供电,急停按键、钥匙开关和启动按键串联接于电源接触器控制端。
设备启动时,首先转动急停按钮使其复位,插入钥匙打开模式开关,按下启动按钮,控制系统上电进入工作模式。工作工程中如按下急停按钮,控制系统立即断电停止工作。工作过程中,可以调节模式开关选择工作模式,不影响系统供电。
电量显示器可实时指示电池电量,并显示系统累计工作时间,工作时间可断电记忆。同时,具有低电量保护输出,电路设计将低电量保护输出与电源接触器控制线圈串联,保护时可控制电源接触器断开,从而系统断电,可防止电池过放。
2.2控制部分
控制部分主要包括DC/DC电源转换、微处理器、继电器开关、液压泵站、传感器、模式调节、交通锥间距调节、指示灯等组成。
模式调节开关为5挡钥匙转换开关,开关有关断位置和4个工作模式挡位,工作模式挡位包括收集、摆放、手动操作模式挡位。手动操作模式时,可通过手动收放开关来操纵收放臂的动作,应用灵活,收放自如。关断位置时可拔除钥匙,使其自身锁住,可防止未经钥匙授权的非法操作[5-7]。
间距调节通过电位器来实现,用于设定摆放时相邻两个交通锥的间距,设计预计5~50 m可连续调节,不同摆放间距要求施工车辆行驶速度不同。
司机指示灯安装于施工车辆侧方,用于指示当前车速情况,司机可通过后视镜观察,适当调整车速。电路设计采用双色红绿LED来实现,橙色表示车速低于最小车速;绿色表示车速适当;红色表示车速高于最高车速;红闪表示车速高于最高摆放车速。车身同时安装作业警示灯,用于在施工作业时提醒来往行人和车辆,电路设计直接选用频闪报警灯,控制简单。
锥托传感器负责检测锥托上是否有存在交通锥,电路设计选用电容式接近开关,可直接感应交通锥[8-10]。车速传感器选用电感式传感器,安装于测速轮上,施工车辆行进时,传感器输出脉冲信号,可根据脉冲信号与行进距离的关系Nm/脉冲和单位时间内脉冲个数计算出车辆行驶速度。
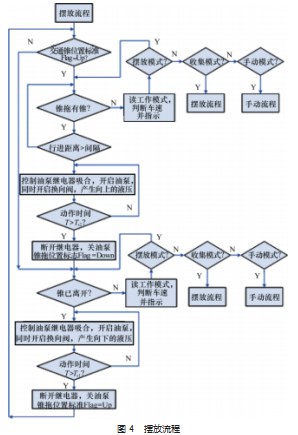
微处理器负责读取设备工作模式、间距设定值、锥托传感器的状态,同时采集车速信息,通过司机指示灯输出当前车速状态,根据设定流程控制继电器开关的通断,从而控制拾取臂的动作,来完成交通锥的收放。收集与摆放交通锥微处理器处理流程如图3和图4所示。设备上电后默认锥拖已经安装好,并放置于低位,拾取臂动作过程中无位置反馈,液压系统具有过压保护功能,完全通过液压系统工作时间来控制起停。
3试验结果分析
现已完成产品试制,经测试机架、摆臂组件、姿态翻转组件以及电控部分均能按预期实现功能。机架乘载了所有部件的安装以及与工程车辆之间的固定,使用一台5 t无尾箱小货车,机架能够顺利安装并固定。摆臂组件可以按预定设计完成将交通锥拾起和放下的动作,实现交通锥的摆放及回收功能。姿态翻转组件能够将交通锥翻转90°,由倒翻转为立,反之亦可。电控部分能按预定计划实现操作、识别、距离判断、速度判断等功能。该试研产品基本实现了预期目标[11]。
4结束语
本系统的设计充分贴合道路工程施工的现场实际情况,设备设计也便于安装在大多数通用卡车上,操作简单,工作时仅需一名车载摆放人员和一名司机,无需挂载拖车,操作相对简单,使用人员只需经过简单的培训即可上手,在交通施工单位中能较好地得到普及。系统设计能够自动或半自动实现交通锥的摆放与回收,且通过人工设定收放模式,可以实现摆放间距等参数的设置,实现多种场景的交通锥收放。设备经试验,实现设计的初衷,且摆放便利、回收方便。本系统的完成,不仅可以为道路施工人员创造一个安全、高效的工作环境,同时,还能很大程度上保证交通锥摆放的一致性,提高美观度。
参考文献:
[1]张强,沈辉,黄佳琦,等.交通锥自动摆放与回收装置设计与研究[J].农业装备技术,2019,45(1):3.
[2]刘锦翼,夏冉,李国铭.交通锥自动收放装备设计与应用研究[J].人民交通,2019(12):2.
[3]广东省电子技术研究所.交通锥半自动收放机方案设计说明[Z].2016.
[4]崔龙飞,张龙,马大为,等.某路锥收放车回转升降机构有限元分析与结构优化[J].机床与液压,2014(3):142-147.
[5]王洁,苏东海,官忠范.液压传动系统[M].北京:机械工业出版社,2015.
[6]常同立.液压控制系统[M].北京:清华大学出版社.2014.
[7]叶亚昌.交通路锥收放箱机构设计与动态特性研究[D].南京:南京理工大学,2015.
[8]朱鲁栋.公路养护用交通锥自动收放车协调控制研究[D].青岛:山东科技大学,2018.
[9]沈为清.路锥自动收放小车的设计与制作[J].技术与市场,2016(6):2.
[10]《工程机械与维修》编辑部.河南高远HGY5100TYH型交通锥自动收放车[J].工程机械与维修,2015(4):1.
[11]林阳,张龙,叶亚昌,等.交通路锥整体收放机构的模态分析与改进[J].机械制造与自动化,2016,45(2):3.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/46599.html