SCI论文(www.lunwensci.com):
摘要:随着现代无人机技术的迅猛发展,无人机摄影测量机载设备的提升和普及,结合计算机对影响资料的后期数据的快速发展,无人机在摄影测量行业的使用也越来越广泛。在利用无人机低空飞行摄影测量地形时,无人机搭载摄影设备对地形进行航测,具备良好的机动性,易操作,在一定程度上节约了人员和物力成本,无人机航测技术的精度与摄影机载设备的精度有关,但是同样条件下整个操作实施过程的环节也影响了最后的测量精度,在同等测量区域的环境条件下,不同的数目的像控点选择和位置布设,不仅影响户外工作效率,在一定程度上也影响最后的整体测量精度,因此,针对相同的测量区域,选择不同的像控点布设的实施方案,对像控点的测量精度进行最后的评估测算,保证兼顾工作效率和测量精度的前提下,通过无人机航测不同像控点布设方案对空三测量进行精度分析,总结出无人机航测像控点布设与空三测量的关系,在保证精度要求的前提下提高资源的利用效率。
关键词:无人机航测;像控点;空三测量;精度分析
Research on the Relationship between the Layout of Aerial Image Control Points Based on UAV and the Accuracy of Aerial Three-dimensional Measurement
Ma Liming,Wang Guili,Zhou Yan,Li Yupeng
(Department of Electrical Engineering,Hebei Electrotechnical Vocational and Technical College,Xingtai,Hebei 054000,China)
Abstract:With the rapid development of modern UAV technology,the promotion and popularization of UAV photogrammetric airborne equipment,combined with the rapid development of computer to the later data affecting the data,UAV is more and more widely used in the photogrammetric industry.When using UAV low altitude flight photography to survey terrain,UAV carries photography equipment to conduct aerial survey of terrain,although it has good mobility,easy operation and saves personnel and material costs to a certain extent,the accuracy of UAV aerial survey technology is related to the accuracy of photography airborne equipment.However,under the same conditions,the links of the whole operation implementation process also affect the final measurement accuracy.Under the environmental conditions of the same measurement area,the selection and location layout of different numbers of image control points not only affect the outdoor work efficiency,but also affect the final measurement accuracy of the whole to a certain extent.Therefore,aimed at the same measurement area,different implementation schemes for the layout of image control points were selected,and finally the measurement accuracy of image control points were evaluated and calculated.On the premise of taking into account the work efficiency and measurement accuracy,the air-3 measurement accuracy was analyzed through different layout schemes of UAV aerial survey image control points,and the relationship between UAV aerial survey image control point layout and air-3 measurement was summarized.It improves the utilization efficiency of resources on the premise of ensuring the accuracy requirements.
Key words:UAV aerial survey;image control point;air three measurement;accuracy analysis
0引言
无人机技术的迅猛发展,与有人机相比,无人机操作简单、反应速度快,更适合一些危险系数较高、环境恶劣的任务,无人机搭载不同的机载设备,已经广泛应用于各大领域,比如航拍、航测、植保、电力巡线、抢险救灾等等,极大拓展了无人机的应用范围,在生产和生活中发挥着重要的作用[1]。
面对不同的地理环境和数据的处理工作,传统的摄影测量已经无法满足当下的作业环境,在测量的精度的要求上也往往达不到实际的工作要求。随着现代摄影测量技术的不断推广,低空无人机遥感技术手段的普及,在航空摄影方面充分发挥了无人机的快速高效、工作时无人机的机动灵活性和数据的精准等诸多优势[2-3],无人机遥感被普遍应用于土地测量、地形地貌绘制、土地资源调查、城市规划建设及地图更新等方面。在整个摄影测量工作过程中,像控点的布设工作是整个摄影测量及数据处理、图像测量的基础,像控点的位置和个数的不同是影响外业工作过程中需要耗费大量人力和物力的环节,更是后期数据处理解析空三和数字测图的前提,针对不同的像控点布设方案及像控点个数的不同,不仅影响了实际的工作效率,更直接影响了最终的数据处理结果的精度,所以像控点的数量和位置的布设将影响航测后期数据的精度[4]。
本文结合实际的航测项目,从外业不同像控点的布设方案,分析研究不同像控点的布设方案对空三测量精度的关系。
1无人机航测技术分析
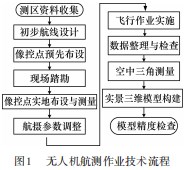
无人机摄影测量技术要符合作业的要求,需要配备安全稳定的无人机,根据测量的区域特点选择无人机机型,本文选用多旋翼无人机进行摄影测量任务,并且搭载稳定性能的摄影相机,对测量区域进行分析并制定出合适的飞行航迹完成数据的采集和后期数据处理软件等技术工作。无人机航测作业的技术的主要流程环节如图1所示[5]。
2像控点布设原则与方案分析
2.1航测像控点的布设原则
利用无人机进行航测飞行采集坐标信息时,应该选择合适的像控点布设方案,才能在后期数据处理时提高精度,减少不必要的工作时间,提升后期数据处理的高效性。在进行地面像控点布设时,需要遵循一定的原则[6],还要根据实际的地理环境和任务要求,选择最合适的像控点布设方案。以下是像控点布设时的注意事项:
(1)在实测环境中,布设像控点时要尽可能均匀;
(2)在同一区域中的像控点要联测成一个等高的点;
(3)在地平面中的像控点的布设位置上,要尽可能地避免像控点的连线为直线;
(4)在布设实际像控点时,应在布设位置上标记上醒目的标记,方便在后期数据处理时,准确刺点,提高精度;
(5)在布设完毕的像控点位置后,应进行拍照保存,方便后期数据的处理,提高刺点的效率,节约工作时间。
2.2航测像控点的布设方案
根据像控点布设时的注意事项和原则,并根据实际的测量区域,本任务将考虑以下4个方案进行布设像控点:(1)在实测区域的每个边缘拐角进行布设平高控制点;(2)在方案1的基础上,在实测区域中心位置布设一个平高控制点;(3)在方案2的基础上,在实测区域的每个边缘上再均匀增加平高控制点的布设;(4)在方案3的基础上,在实测区域内部再均匀增加少量平高控制点的布设。
3像控点布设研究实例与分析
3.1实测区概况及设备参数
实测区域位为河北机电职业技术学院,地理坐标为北纬N37°05'38.65″,东经E114°27'11.39″,东西南北为市区内4条区域干道,实测区域为规整的四边形,区域比较规则,海拔高地落差小于5 m,实测区域内的最高建筑为主教学楼,其高度大致约为60 m左右,地势也比较平坦,学院实测面积约为55万m2,该区域特征比较明显,对实测区域像控点的布设方案与后期的数据处理空三加密解算的结果,分析探讨出不同像控点布设方案对实测区域空三测量精度之间关系。实测区域俯视图如图2所示。
该实测飞行区域使用大疆精灵4 RTK小型四旋翼无人机,该设备的主要参数如表1所示。
3.2飞行实施设计与航线敷设
根据《低空数字航空摄影规范》[6]的相关要求,在保证各个方面安全的前提下,在无人机进行摄影测量时,无人机的飞行高程、拍摄照片的重叠度都要提前设定好,来满足无人机的安全飞行和任务的要求,首先需要通过实测区域的地形图的比例尺和地面的分辨率(GSD)之间的关系,来算出GSD的取值范围;然后再根据无人机相机的参数情况、GSD和飞行高度(H)的关系[7]如下:
式中:f为相机主距,mm;a为像元尺寸,mm。
根据以上的公式可以算出无人机飞行的高度范围。为了飞行的安全和飞行规定,确定可允许飞行的最大高度,确保不能飞行高度高于最高点,保证无人机任务的安全性。
无人机飞行航迹采用飞控软件进行设置,飞行设备按照规划好的路线进行摄影测量,飞行高度设定为110 m,保证安全和能够高于最高建筑物50 m左右,航向重叠度设置和旁向重叠度都为75%。进行飞行拍照时选择间隔时间为2 s,边距值设置为0 m,无人机飞行速度设置为8 m/s,分辨率达到5 cm。
3.3实测区域像控点的布设方案分析
根据实际的测量区域的地理形势,实测区域为一个规则的四边形,此次研究探讨像控点的布设位置及数量与空三测量后实景三维图的精度的关系,确定了4种不同的像控点布设方案进行分析。
方案1:在实测区域的4个边缘拐角进行布设平高控制点,共布设4个像控点,像控点布设如图3所示。
方案2:在方案1的基础上,在实测区域中心位置布设一个平高控制点,共5个像控点,像控点布设如图4所示。
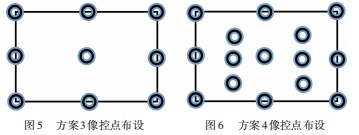
方案3:在方案2的基础上,在实测区域的每个边缘上在均匀增加平高控制点的布设,共9个像控点,像控点布设如图5所示。
方案4:在方案3的基础上,在实测区域内再均匀增加少量平高控制点的布设,共布设15像控点,像控点布设如图6所示。
本任务利用无人机低空摄影测量技术,在实测区域中布设了15个像控平高控制点,在采集后的影响照片数据后,将所采集到的像控数据全部导入Smart3D软件进行实景的三维建模工作。
在完成了实景三维建模的工作后,对4种不同像控点的布设方案建模得到的三维模型进行精度的比较,然后再测区内利用GNSS RTK去实际测量检查点的实际坐标值为真实值,在实测区域中共选择了10个检查点进行分析。在三维模型中得到与之相对应的检查点的坐标为测算值,利用检查点的真实值和测算值计算出各点的平面中误差值和高程中误差值,然后比较4种像控点布设
方案的精度。中误差值的计算公式如下:
式中:m为各个方向中误差值;Δ为各个方向真误差值;n为检查点的个数。
平面中误差值可以根据计算得出的X和Y方向的中误差值进行计算得出,计算的公式如下:
在实测区域内使用区域网的像控数据进行航测空中三角测量和平差解算。空三测量精度的标准为每个像控点投影误差的平均方根值(RMS)。空三测量精度的计算公式如下:
式中:σr为像控点的平均方根值(RMS);x'和y'为使用平差计算后的像控点投影到原始摄影像片的坐标值;x和y为最初的原始像控点的观测值的坐标;n为像控点的个数。
无人机低空摄影测量的精度主要根据空三测量的精度与生成的三维模型的精度比较分析[8-9]。主要利用4种不同像控点布设的方案,经过空三解算后,对空三解算的结果进行像控点不同布设方案与精度之间的关系。
在实测过程中,外业的实施过程中,选择的像控平高点共15个。选择的所有像控点都成功在内业数据处理进行了准确刺点,最后经过数据的处理加工,最后数据统计的结果如表2所示,列出了关于像控点数量和位置与空三测量关系的精度分析情况,由表可知,在满足实际测量要求的情况下,方案2在方案1的情况下,在测量区域中心位置多布设了一个像控点,方案2的空三精度和模型成果测量精度都得到了改善和提高,方案3是在方案2的基础上在每条边缘线上均匀地多布设了像控点数量,空三测量精度也有小幅度的提高,方案4也是在方案3的基础上在实测区域内部均匀增加了像控点的布设,从方案3的主要位置的9个像控点增加到了15个像控点的数量,但是整个的测量精度并没有成比例的增加,测量精度相比方案3的提高不是很大,整体可以看出在方案4的情况下,像控点数有所增加,但整体模型精度变化比较稳定[10]。
4结束语
通过本任务的实施,选择了4种不同像控点数量和位置的布设方案,通过最后的空三测算后,对不同像控点布设的方案空三精度进行对比,发现像控点的数量和位置的选择对空三测量的精度存在一定关系,在布设像控点时,选择方案4的像控点布设方案精度是比较高的,但是相比方案3而言,精度的提升并不是很大,所以根据实际情况和本次研究分析可得,对于像控点的选择最好选择第4种方案,但是对于实测区域内的像控点均匀选择的数量不宜过多,虽然在一定程度上能提高随后的测算精度,但是相比浪费的人力和物力来说并不是很实用,所以根据实际的精度要求,在保证满足实际精度要求的前提下,选择合适的像控点的布设方案很重要,并不是像控点越多越好,合理选择像控的布设极大程度地解决了人员的浪费,对实际的生产和资源利用方面具有很高参考价值。
参考文献:
[1]赵丽颖,付强,黄丹飞,等.基于无人机航拍图像快速拼接方法的研究[J].长春理工大学学报(自然科版),2021,44(6):39-46.
[2]肖登枝.无人机倾斜摄影测量三维建模及应用[J].城市勘测,2019(5):81-83.
[3]褚杰,盛一楠.无人机倾斜摄影测量技术在城市三维建模及三维数据更新中的应用[J].测绘通报,2017(S1):130-135.
[4]罗东山,李相庭,何军,等.无人机航测像控点布设对空三精度的影响[J].测绘标准化,2017,33(3):34-36.
[5]葛陈豪,刘晓露,余祖锋.无人机倾斜摄影测量精度优化研究与分析,2021(2):80-83.
[6]杨德芳,田晓程.低空无人机影像像控点布设及精度分析研究[J].青海国土经略,2015(1):54-56.
[7]CH/Z 3005—2010,低空数字航空摄影规范[S].
[8]GB/T 23236—2009,数字航空摄影测量空中三角测量规范[S].[9]CH/T 9015—2012,三维地理信息模型数据产品规范[S].
[10]王朝辉,吴昊,孟将.无人机倾斜摄影像控布点方案研究及精度分析[J].测绘通报,2021(5):102-105.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/45766.html