SCI论文(www.lunwensci.com):
摘要:针对复杂环境下非视距等因素造成的UWB定位精度下降的问题,提出了一种基于加权融合-UKF的超宽带定位算法。首先建立一套非视距环境中的UWB基站系统,通过PC端采集各个基站的测距信息;其次通过搭建合适的CNN网络对原始数据进行预处理,有助于提高数据的稳定性;然后对原始数据进行指数加权移动操作,设计以测距距离为变量的加权函数,将指数加权移动处理的数据与CNN处理后数据进行融合,改善信号均值漂移问题;最后引入UKF对融合数据进行滤波计算,得到目标节点的位置坐标。采集多个点的数据进行试验验证,其结果表明,提出的方法对非视距造成的定位误差有良好的改善效果,算法定位精度RMSE均值约为2.94 cm,精度相比单一UKF解算提高了46.79%,比单一CNN处理提高了17.88%。
关键词:室内定位;超宽带;非视距;加权融合
UWB Indoor Hybrid Positioning Based on Weighted Fusion-UKF Guo Junquan1,Gao Weiqiang1,Liu Da2,Liu Jianqun1,Liang Xuesheng1
(1.School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou 510006,China;2.Foshan Clev Robot Co.,Ltd.,Foshan,Guangdong 528225,China)
Abstract:Aiming at the problem of reduced UWB positioning accuracy caused by factors such as non-line-of-sight in complex environments,an ultra-wideband positioning algorithm based on weighted fusion-UKF was proposed.First,a UWB base station system in a non-line-of-sight environment was established,and the ranging information of each base station was collected through the PC.Secondly,the original data was preprocessed by building a suitable CNN network to improve the stability of the data.Then,an exponentially weighted movement operation was performed on the original data,a weighting function was designed with the ranging distance as a variable,and the exponentially weighted movement processed data was fused with the CNN processed data to improve the signal mean drift problem.Finally,UKF was introduced to filter and the fusion data was calculated to obtain the position coordinates of the target node.Collect multiple points of data for experimental verification,and the results show that this method has a good improvement effect on positioning errors caused by non-line-of-sight.In the experiment,the average RMSE of the positioning accuracy of the algorithm is about 2.94 cm,which is 46.79%higher than the single UKF solution and 17.88%higher than the single CNN processing.
Key words:indoor positioning;ultra-wideband;non-line-of-sight;weighted fusion
0引言
随着科技日益进步,人们对位置信息的需求越来越大[1]。仓储物流、机器人送餐、医院咨询等复杂室内环境对定位技术提出了新挑战。室内定位技术多种多样,主要有红外线、超声波、蓝牙、ZigBee等。与这些技术相比,超宽带(Ultra-Wideband,UWB)技术具有穿透力强、功耗低、抗多径效果好等特点[2]而被广泛研究。UWB定位技术在室内常见的测量方法分为4类:信号强度分析、到达角度、到达时间以及达到时间差。其中到达时间(Time of Arrival,TOA),因系统成本较低且定位准确而被应用到实际生活当中。
在视距良好的情况下,基于Chan、Fang等多类定位算法均能精确定位,保证定位需求。在有人员流动或障碍物的非视距(Non Line of Sight,NLOS)情况下,定位算法性能急剧下降,定位结果偏移严重。研究人员[3-10]从信道模型、视距信号鉴别、混合算法等角度对UWB定位情况进行了探讨。其中杨亚楠[11]设计卷积神经网络对超宽带信道环境仿真进行了分类研究,准确率达到93.4%;杨紫阳等[12]通过设定门限值来鉴别NLOS误差,剔除含有较大NLOS误差的测量值。李娅菲[13]建立由TOA等多种测量方法得到的距离值的测距信息库,进行联合判定剔除非视距误差。为解决NLOS引起的误差,本文提出一种基于加权融合-UKF的联合定位算法。该方法使用卷积神经网络(Convolutional Neural Networks,CNN)对数据进行预处理,改善测距信号的稳定性,同时使用指数加权移动平均(Expoentially Weighted Moving Average,EWMA)对原始数据进行处理,保留原始数据的数字特征。然后对上述得到的两批数据进行加权融合,再使用无迹卡尔曼滤波算法(Unscented Kalman Filter,UKF)进行定位解算,从而减少NLOS误差的影响。
1相关流程及原理介绍
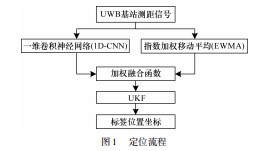
本文采用一维CNN(1D-CNN)、加权融合、UKF三者结合的方法对UWB测距信号进行定位解算。1D-CNN可用于一维信号处理,其降噪能力优越,解算速率快,对UWB测距信号有明显效果,但对于远距离的数据拟合有一定偏差。因而引入加权融合思想改善远距离的数据拟合质量。首先对原始测距信号进行EWMA处理,然后根据实验测试数据得出适合的加权函数,将其结果与1D-CNN处理的数据进行加权处理,最后由UKF建立定位方程进行解算。具体流程如下:(1)基于TOA定位原理,各个基站通过双边双向测距方法获取到标签的距离;(2)设计搭建1D-CNN的网络结构,对模型进行训练测试,并保存最优参数;(3)使用EWMA对原始测距信息进行平滑处理;(4)引入加权融合算法,对步骤(2)(3)所得数据进行融合;(5)根据UKF建立定位方程,进行解算。整体流程如图1所示。
1.1 TOA定位原理
本文采用TOA定位方案,由基站向标签发送轮询消息进行测距,得到标签到各自基站的距离,以此来计算
标签在基站坐标系中的位置。TOA定位模型可表示为:
式中:(xi,yi)为第i个基站的平面坐标;(x,y)为标签的位置坐标;di为标签到第i个基站的距离。
1.2 1D-CNN
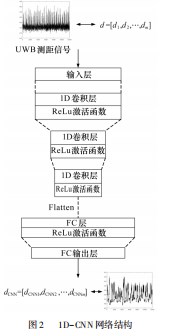
卷积神经是深度学习的一种模型,其输入层可以处理多维数据。利用CNN进行数据预处理,相比于传统的滤波处理手段,其具备更强的去噪能力,可以通过单一模型抑制不同水平噪声。本文利用多层1D-CNN对UWB信号进行数据处理。对UWB信号进行特征提取时,卷积核大小分别设置为27×1、7×1、5×1,前期使用大卷积核消除噪声、中后期使用小卷积核提取有效特征。卷积层后接全连接层,起到降维和“防火墙”的作用。图2所示为UWB测距信号在1D-CNN中的全部处理过程。可以明显看出经过1D-CNN处理的UWB测距信号跳动幅度远小于原始数据。
1.3加权融合
任意节点的测距信息都存在均值漂移、误差波动大等情况。从仿真模型角度解释为UWB信号模型呈簇状,单簇内部符合泊松分布,整体符合泊松过程,并且在人员干扰的情况下,引起更大的测距误差。此外,UWB在短距离的测距信息会明显小于真实距离,该特点对1D-CNN而言,会使得训练效果下降,给远距离的数据处理带来偏差。而经过EWMA处理的测距信息仍然保留了原始数据的特征,在远距离处的精度较高,可以弥补1D-CNN的不足,因此引入加权融合思想,根据多次测量数据设计相应的加权函数,采用了三次函数的形式进行加权系数的设计。
式中:jq为加权融合之后的测距信息;dEWMA为对原始测距信息进行EWMA处理的结果;dCNN为经1D-CNN处理后的数据,α为加权系数,通过实验归纳拟合得到;μ根据传感器硬件进行调节,为简便实验,此处不考虑基站之间的差异,统一设定为520。
EWMA算法如下:
式中:vt为冷启动情况下EWMA的处理数据,通过式(5)来修正冷启动引起的前期数据偏差,得到dEWMA;β为加权下降的快慢,值越大下降越慢,一般取1>β≥0.9;dt为t时刻的实际测距信息。
1.4 UKF原理及流程
基于TOA技术的UWB定位系统中,定位方程是非线性的,根据UWB测距条件,建立方程:
式中:Xk=[xk,yk]T,为k时刻定位标签的位置坐标;F为状态转移矩阵;Zk=[d 1k,d2k,…,dnk]T,为UWB各个基站的测距值;Wk、Vk分别为过程噪声、观测噪声,对应的协方差矩阵为Qt、Rt。
UKF使用无迹变换来处理非线性问题,原理可归纳为,按某一规则在原状态分布中选取一些采样点,使这些采样点的均值和协方差等于原状态分布的均值和协方差,代入非线性方程中,得到相应的非线性函数值点集[14]。无迹变换具体步骤如下。
(1)计算2n+1个采样点,n表示状态维数:
式中:λ为缩放比例参数;α为控制采样点分布;k为尺度参数。
UKF的实现过程如下。
(1)根据式(8)~(10)得到采样点集:
(3)根据步骤(2)所得一步预测X者(k+1|k)与协方差阵P(k+1|k),进行新一轮的无迹变换,然后代入量测方程,求取量测一步预测以及协方差:
( 4) 量测更新, 得到
k 时刻系统的状态更新及协方 差更新:

2定位算法实验测试
2.1实验场景
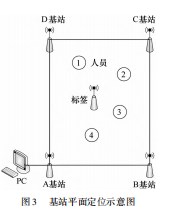
本次实验场景布置如图3所示,4个定位基站的坐标(单位:cm)分别为(0,0)、(603,0)、(603,800)、(0,800)。基站摆放水平位置与标签一致。为验证定位算法在非视距环境中的定位效果,在定位区域中增加4名人员进行运动干扰。本文中用于测试展现的为4个位置点,各12 000组数据。
2.2实验结果与分析
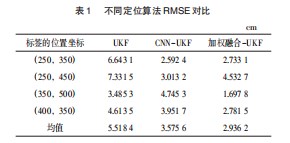
表1所示为在NLOS环境下,不同定位算法的均方根误差(Root Mean Square Error,RMSE)。相比于单一的UKF定位算法,CNN-UKF、加权融合-UKF的RMSE平均误差分别降低了35.20%、46.79%。CNN-UKF的处理效果有了很大提升,但部分位置的RMSE低于单一UKF。从表中可以看出加权融合-UKF联合定位算法的精度更优,结合了CNN与原始数据的共同特点。当原始数据偏差较大时,加权融合会受到一定影响,造成RMSE略高,但整体在一个较低的水平。
为评价算法效果,以A基站为参照,计算标签到A基站的测距真实值与算法估计值的误差。对标签定位在真实坐标(250,350)和(250,450)的采样数据进行解析。从图4~5中可以发现,原始测距误差约±15 cm,并存在特大误差,CNN处理的数据误差较稳定,且精度更高。加权融合的数据误差基本稳定在0值附近,当CNN误差较小时,加权融合的数据也较小,当其误差较大时,同样可以保持稳定。从整体上看,加权融合所得到的测距数据结果更符合实际使用要求。
为进一步观察定位算法效果,求取标签位置坐标的真实值与算法估计值的误差。选取标签真实坐标(350,500),(400,350)采样数据分析。图6~7是UKF和加权融合-UKF的误差对比。在已知这两点RMSE较低的情况下,UKF解算仍存在较大的定位误差,从侧面可以看出NLOS对定位解算存在严重的干扰,而加权融合-UKF的解算结果波动较小,稳定性更高,没有出现特大误差,基本在RMSE的结果附近跳动。
3结束语
在实际场景中,UWB信号会受到室内结构及行人影响,从而使得多径效应明显,造成巨大的定位误差,本文针对该现象,提出了一种基于加权融合-UKF的联合定位算法。充分利用CNN拟合优势,对原始数据进行降噪处理,根据结果显示1D-CNN对UWB的原始测距数据处理效果较好,同时通过指数移动平均保留原始数据的基本特征,为弥补CNN处理的缺陷,设计加权融合算法将两者进行统一,最终引入UKF对测距信号进行定位解算,提升定位整体精度的同时,也能够有效地抑制粗大误差,基本满足应用要求。考虑到算法参数数量问题,后续会将加权的参数统一放入一个框架,实现参数的自适应调整。
参考文献:
[1]曹子腾,郭阳,刘正旭,等.室内定位技术研究综述[J].计算机技术与发展,2020,30(6):202-206.
[2]朱颖.基于UWB的室内定位系统设计与实现[D].南京:南京邮电大学,2019.
[3]张怡,席彦彪,李刚伟,等.基于卡尔曼滤波的TDOA/AOA混合定位算法[J].计算机工程与应用,2015,51(20):62-66.
[4]余央.NLOS条件下TOA/TDOA定位优化方法[D].成都:电子科技大学,2018.
[5]葛丽丽.基于UWB的高精度室内定位及时钟同步算法的研究[D].北京:北京邮电大学,2019.
[6]刘琦,高成发,尚睿.线性化误差对于UWB系统定位精度影响分析[J].测绘工程,2021,30(3):26-31.
[7]刘金鑫.基于超宽带技术的高精度室内定位研究及应用[D].哈尔滨:哈尔滨工业大学,2020.
[8]薛阳阳,沈重.基于GA-BP神经网络的超宽带室内定位[J].海南大学学报(自然科学版),2021(6):1-7.
[9]李贵玉.基于UWB的室内服务机器人组合定位跟踪技术的研究[D].南昌:南昌航空大学,2019.
[10]蒙静.超宽带室内定位系统测距误差建模与优化[C]//第二届中国卫星导航学术年会,2011.
[11]杨亚楠,夏斌,赵磊,等.基于卷积神经网络的超宽带信道环境的分类算法[J].计算机应用,2019,39(5):1421-1424.
[12]杨紫阳,吴才章,张弛.基于Chan和改进UKF的UWB室内混合定位算法[J].组合机床与自动化加工技术,2020(12):65-69.
[13]李娅菲,朱烜璋.非视距条件下的测距信息融合定位方法研究[J].电子测量与仪器学报,2015,29(5):775-780.
[14]黄小平,王岩.卡尔曼滤波原理及应用:MATLAB仿真[M].北京:电子工业出版社,2015.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/45694.html