SCI论文(www.lunwensci.com):
摘 要 :针对显著目标检测问题在没有任何先验信息的情况下,通过特征聚类和紧致性先验方案实现目标检测优化。优化 后的方法包括四个步骤 :首先采用超像素预处理将图像分割成超像素,以抑制噪声并降低计算复杂度 ;其次应用改进的虾群聚 类算法对颜色特征进行分类 ;接着利用二维熵来衡量每个簇的紧密度,并构建背景模型 ;最后以背景区域与其他区域之间的对 比度作为显著特征,并通过设计高斯滤波器增强其显著性。为了更好地评价显著目标检测的精度,本文通过多维评价指标进行 优劣性实验分析,实验结果表明,文中算法具有较好的实时性与鲁棒性。
关键词 :显著目标检测,虾群聚类 ,特征先验 ,超像素预处理
Object Detection Optimization Based on Prior Feature Clustering
DU Shuying1,2, HE Wang2
(1.School of Information Management,Xuzhou Vocational College of Bioengineering, Xuzhou Jiangsu 221000)(2. School of Computer Science and Technology,China University of Mining and Technology, Xuzhou Jiangsu 221116)
【Abstract】:In addressing the issue of salient object detection without any prior information, this study proposes an object detection optimization method using feature clustering and a compactness prior scheme. The optimized approach consists of four steps: Firstly, a superpixel preprocessing is employed to segment the image into superpixels, suppressing noise and reducing computational complexity; Secondly, an improved shrimp swarm clustering algorithm is applied to classify color features; Additionally, two-dimensional entropy is utilized to measure the compactness of each cluster and to construct a background model; Finally, the contrast between the background region and other regions is used as a salient feature, enhanced through the design of Gaussian filters to amplify its saliency. To better evaluate the accuracy of salient object detection, this paper conducts experiments and analysis using multidimensional evaluation metrics, and the results demonstrate that the proposed algorithm exhibits good real-time performance and robustness.
【Key words】:salient object detection;shrimp swarm clustering;feature prior;superpixel preprocessing
0 引言
当人们观察一幅图像时,往往会在第一眼就直觉地 聚焦于与其他区域明显不同的区域或物体,这便是显著 性目标的特征,而显著性目标检测是模拟人类视觉系统, 从 AI 的角度自动地识别图像中的重要对象 [1]。作为在预 处理中减少计算复杂性的关键,显著性检测近来受到广 泛关注,并广泛应用于计算机视觉的各个子领域,这些子领域包括图像分割、目标检测、图像检索、视频压缩 等。解决显著性检测问题在计算机视觉及相关 AI 领域具 有重要意义,同时对这些子领域也带来积极的影响。
近年来, 提出了多种显著目标检测方法, 它们可以 分为三类 :基于局部对比的模型、基于全局对比的模型 以及基于背景先验的模型。(1)局部对比模型将显著 特征定义为周围小区域内的中心与周围差异 [2],这种方法可以轻松检测到小的目标,但是当显著目标对象较大 时,对象内部的像素与周围像素相似且没有奇点,这将 无法突出显著目标的内部区域。在这种情况下,显著区 域可能会被误判为背景,导致泄漏检测 [3], 例如, Ma 等人通过计算每个图像像素与其固定邻居的颜色差异来 生成显著性图 [4]。(2)全局模型则将显著特征计算为整 个图像的独特性,它们可以弥补局部模型的不足,但全 局对比忽略了像素之间位置关系对特征的影响,即使像 素具有相似的特征,由于它们位于不同位置,可能属于 目标或背景,例如, 一种使用颜色直方图作为图像统计 特征的方法,生成像素级的显著性图 [5]。Cheng 等人通 过全局对比和空间加权一致性分数来检测显著性对象 [6]。 Achanta 等人进一步提出了一种频率调整的显著性方 法。Han 等人通过整合全局对比的外观稀有性和目标可 能性提出了一种概率计算模型 [7]。在某些图像上,这些 模型取得了良好的检测结果,但由于忽略了像素位置信 息,也会导致漏检和误检。(3)背景先验模型的原则来 源于摄影师的经验。在拍摄照片时,通常将目标置于图 像内部,而周围区域通常属于背景区域。显著特征被定 义为内部区域与周围区域之间的对比度。这些方法在许 多情况下可以获得较好的检测结果,但当目标靠近图像 边缘或目标的颜色与周围区域相似时,也会导致泄漏检 测 [8]。为了解决泄漏检测问题, 一些方法将图像边缘上 的块逐层分成四组,并分别处理。然而,如果输入图像 数据过大,这些方法可能会提高计算的复杂性。
随着深度学习技术在计算机视觉领域的成功应用, 自 2015 年以来,越来越多的深度显著目标检测方法 涌现出来。Wu 等人提出了一种用于显著目标检测的 堆叠交叉精炼网络(SCRN)[9],通过堆叠交叉精炼单 元来提炼显著目标检测和边缘检测的多层特征。Zhao 等人提出了一种用于显著目标检测的边缘引导网络 (EGNet) [9]。受益于显著边缘特征中丰富的边缘信息和 位置信息,融合后的特征可以更准确地定位显著目标, 尤其是它们的边界。显著目标的边界和定位在显著边缘 特征的帮助下得到改进。Zhao 等人首先通过非深度学 习模型得到对比先验信息,然后利用基于 CNN 的架构 增强深度信息。Liu 等人通过使用彩色和深度图像,提 出了一种用于 RGBD 显著目标检测的跨模态自适应门 控融合生成对抗网络。具体而言,生成器网络采用双流 编码器—解码器网络,同时接收 RGB 和深度图像 [10]。
本文提出了一种新颖的背景模型,通过使用颜色分 布特征来检测显著目标,以克服仅使用图像边界信息获 得先验信息的弱点。所提出的方法基于特征聚类和紧致 性先验来构建背景,主要从三个方向做出了优化 :首先本文将不同的颜色特征像素以改进的聚类算法分组为不 同的类,以保持其在检测中的良好局部性 ;其次本文首 次使用二维信息熵计算前景和背景的分布特征来区分背 景和显著区域,即较小(较大)信息熵的像素属于显著 (背景) 区域 ;最后本文将所提出的方法与目前较为常 见的同行方法在广泛使用的数据集上进行了比较。
1 算法实现
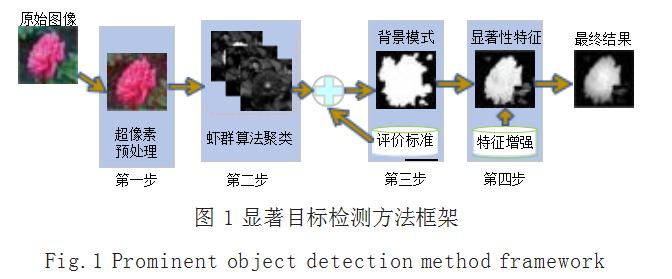
首先,本文显著目标检测框架的流程图如图 1 所 示,包括四个阶段 :超像素预处理、特征聚类、背景模 型构建和显著特征计算。第一阶段的超像素预处理旨在 有效消除噪声并提高计算效率 ;在第二阶段,本文应用 聚类算法对颜色特征进行分类 ;第三阶段是模型的关 键,其展示了颜色特征的紧致性先验,并为新颖的背景 模型构建提供了基础 ;在最后一个阶段,框架计算背景 区域与其他区域之间的颜色对比度作为显著特征,以便 进行后续的检测。这些显著特征将帮助算法更准确地定 位显著目标。整个算法框架通过这四个阶段的有序处 理,实现了高效准确的显著目标检测,如图 1 所示。
1.1 超像素预处理
由于单个像素或少数几个像素不能表示任何语义信 息,只有在一个区域内的像素才能表示确切的语义信 息。超像素分割算法通常用于目标检测、图像检索等领 域。一般来说,用超像素替代像素可以减少冗余和复杂 性 [11], 一个好的超像素分割算法可以提高检测的性能。 近年来,行业内已经提出了许多超像素分割算法,其中 最广泛使用的便是简单线性迭代聚类(SLIC),它采用 K-means 聚类生成超像素。与其他超像素分割算法相 比, SLIC 具有以下优点 :(1)生成的超像素紧凑如同 单元格,邻域特征容易表达,因此基于像素的方法可以 轻松转换为基于超像素的方法 ;(2)可同时对彩色图像 及灰度图进行分割 ;(3)需要设置的参数非常少,默认 情况下,只需要设置预分割的超像素数量 ;(4)与其他 超像素分割方法相比,在运行速度、超像素生成的紧凑 性和轮廓保持方面, SLIC 更加理想。因此,本文选择 SLIC 方法进行图像预处理。
1.2 特征聚类
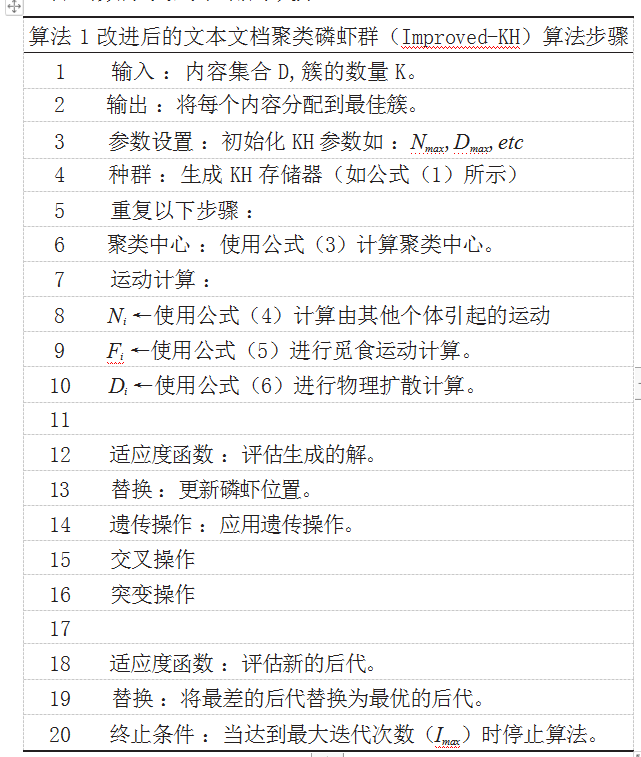
聚类是一个将数据分组到不同类或簇的过程,使得同一簇中的对象表现出最大的相似性。本文以一种改进 虾群算法(Krill Herd Algorithm, KH)为基础实现数 据处理时的聚类操作 [12]。为了提高算法效率, 本文主 要针对全局搜索策略(即遗传操作)进行了优化。这一 改进是通过将当前解与从运动计算中生成的解进行比较 后再应用遗传操作,并将遗传操作引入的解与当前解进 行比较来实现的,改进后的 KH 算法通过在运动计算引 入的高质量解上应用遗传操作,并引入新的评估步骤, 从而增强了全局搜索能力,并在聚类过程中使用建议的 混合函数来找到准确的决策。
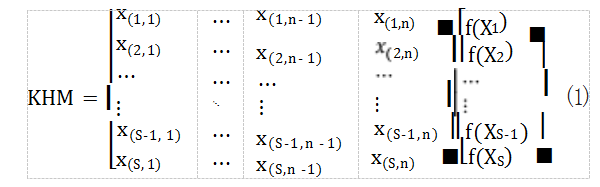
KH 填充有均匀分布的随机生成的可行解, 这些解 表示为向量。每个位置对应于集合 {1, 2, ...., K} 中的特 定数字。虾群存储器(KHM)是一个大小为 S*n 的矩 阵,其中 S 是解的数量 ,n 是每个解的长度,而f(x1) 是 解编号为 1 的适应度函数值,如式(1)所示 :
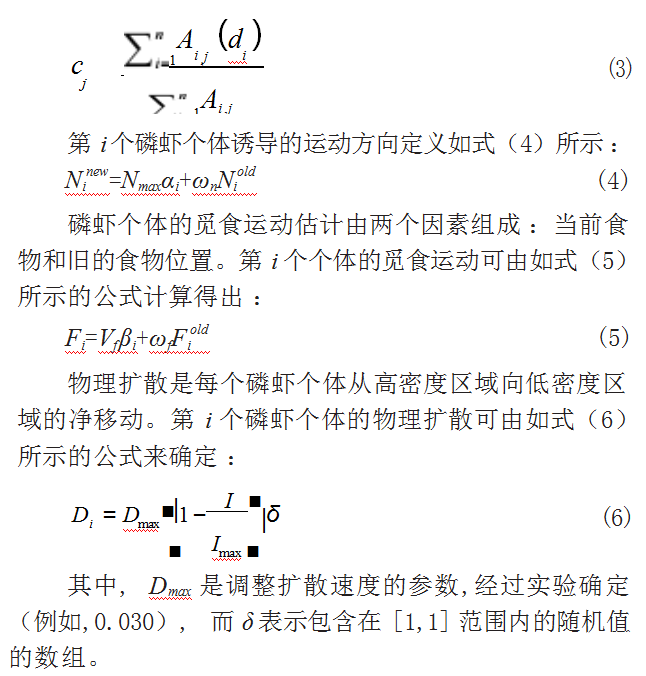
在步骤 6 中, 根据每个解的当前位置计算其适应度 函数。每个解表示大小为 n*k 的二进制矩阵 Aij,用于计 算聚类中心,如式(2)所示,而用于计算聚类编号为j 的聚类中心如式(3)所示 :
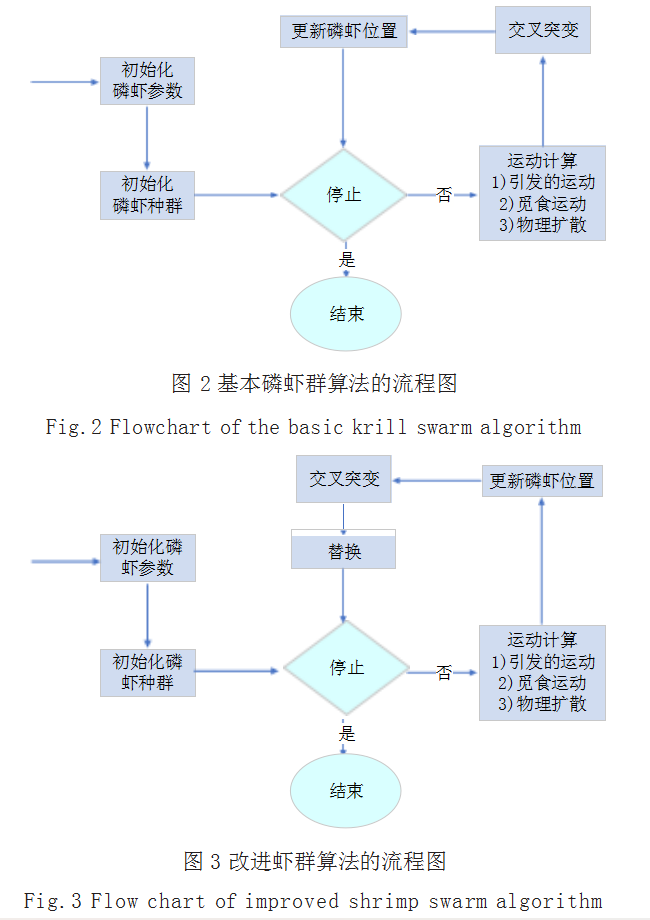
如图 2 和图 3 所示展示了基础虾群算法与改进虾群算 法之间的主要区别 [13,14]。改进后的虾群算法(MKHA)通 过对解进行两次评估来增强全局搜索能力 :一次是在使 用运动计算找到磷虾个体新位置后 ;另一次是在使用遗传操作找到磷虾个体新位置后。这两次评估保护了 KH 算法解决方案免受遗传操作的负面影响。每个解都有很 大机会通过更多地控制生成的解来提高其质量。如果新 解的适应度优于旧解的适应度,则将旧解替换为新解 ; 否则,旧解保持不变,此过程可以对所有解都进行迭代。
1.3 背景模型
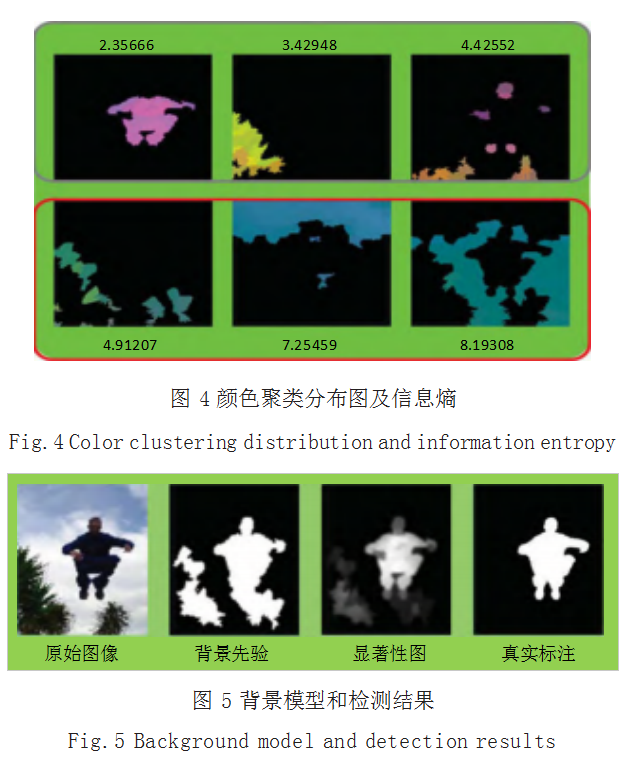
由于图像背景像素通常是分散的,而属于对象的像 素通常聚集在一起,由于二维熵的熵值可以有效地表征 分布特征,因此本文选择计算其二维信息熵来构建背景 模型 [15]。如图 4 所示显示了每个颜色聚类的分布及其 二维信息熵。从图 4 中可以看出,集中的颜色特征具 有较小的信息熵,而分散的颜色特征具有较大的信息 熵。通常具有较小二维信息熵的颜色特征可能属于显著 区域,但也可能属于背景,然而如果颜色特征具有较大 的二维信息熵,则必定属于背景。在第一行中,三幅图 像的颜色特征具有较小的熵值,它们包括显著区域和一 些背景区域,相比之下,在第二行中,三幅图像的颜色 特征具有更大的信息熵,尽管它们并不包含所有背景区 域,但它们也不包含显著区域。因此,本文将图像划分 为 6 个聚类以获得每个聚类的特征图, 并选择 3 个具有 最大熵值的聚类作为背景区域。
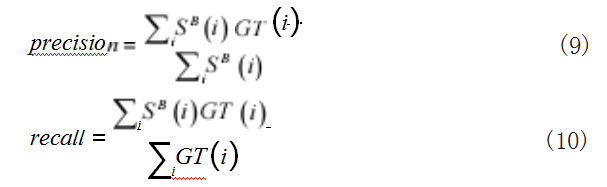
图像边界大多被认为是背景,因此本文将图像边界 添加到图像背景中。如图 5 所示显示了背景模型和检测 结果。蓝天和白云分布在整个图像中,具有较大的信息 熵,图像中人的颜色特征分布具有较小的信息熵,图像边缘的树叶分布更密集,信息熵较小,并且可以通过清 除边缘区域来消除一些干扰项。
1.4 显著特征计算
由于本文的视觉系统对颜色对比度特别敏感,颜色 对比度对显著性检测有显著影响。本文定义颜色对比度 的特征值如式(7)所示 :
在公式(7) 中, dij 表示第 i 个和第j 个超像素中心 之间的距离。两个超像素之间的距离越远,交互作用越 小 ;两个超像素之间的距离越近,交互作用越大。Ci 和 Cj 分别表示第 i 个和第j 个超像素的平均颜色特征,符 号∥ . ∥表示 L1 范数(曼哈顿距离)。
1.5 特征增强
图像增强是目标检测中的一个重要步骤,它可以有 效地抑制噪声并改善检测结果。中心偏置机制是近年来 各种算法中的一种流行且有效的方法。该方法的前提是 能够更好地增强目标,假设显著目标位于图像的中心, 然而,显著目标并不总是位于图像的中心,有时它可能 位于图像边缘附近。本文设计了一个新型高斯滤波器, 根据显著区域的位置和大小来增强特征图。高斯滤波器 定义如式(8)所示 :
在公式(8) 中, x0 和y0 表示粗显著区域中心位置 的横坐标和纵坐标值,参数 r 表示区域的半径。高斯滤 波器的中心位置选择为显著区域的中心,而不是图像中 心。这种中心选择既可以增强显著区域,又可以抑制远 离目标中心的背景区域。实验证明,这样的滤波器可以 捕捉对象和边界的基本特征,并过滤掉检测中的噪声。
2 实验
2.1 实验方法
本文在两个广泛使用的数据集(MSRA 与 ECCSD)上 对文中介绍的方法与几种传统方法进行了广泛的比较 [16,17]。 Microsoft Research Asia 数据集(MSRA) 是由微软 亚洲研究院建立的第一个大型开放式图像数据库,用于 定量评估视觉注意算法的有效性,它包含了各种类型、 广泛和代表性的 1000 张图像。这些图像来自论坛和搜索 引擎,包含了各种大物体、小物体、单个物体、多个物 体、位于图像中心的物体、位于图像边缘的物体等显著 目标,由此可以看出,此数据集是最广泛使用的用于评 估显著目标检测算法的数据集。复杂场景显著性数据集 (CSSD) [18] 包含 200 张图像, 这些图像来自 BSD300、 VOC 数据集和互联网,包含了前景和背景中多样化的模式。ECSSD 是 CSSD 的扩展版本, 包含了 1000 张图 像,其中许多图像在语义上有意义,但结构复杂。在此 实验中,本文分别将本文方法与 HFT、SF、IT、HC、 FT、SR 和 LC 进行比较 [19],其中 HC 采用颜色对比度 和空间距离计算显著图,并因其高质量的检测结果而得 到学者们的广泛认可。
2.2 性能评估
为了充分评估该算法的性能,此处使用了标准的精 确度—召回率(PR)曲线、F-measure、接收者操作 特征(ROC) 曲线和 ROC 曲线下面积(AUC)等指标 对所提出的方法进行了性能评估。
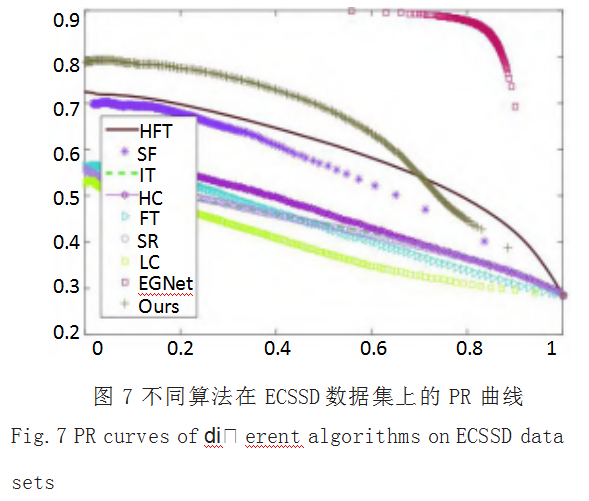
PR 曲线是显著性图评估中常用的指标。每个显著 性图都被归一化到相同的范围 [0,255],然后将整数阈 值从 0 变化到 255,得到 256 个二值显著性对象掩码。 设为每个二值显著性对象掩码,为相应的真值掩码。精 确度和召回率定义如式(9)、式(10)所示 :
相应的精确度—召回率曲线绘制了 256 个平均精确 度值与 256 个平均召回率值之间的关系。不同显著性图 的 PR 曲线显示如图 6、图 7 所示。
F-measure 是平均精确度和平均召回率的调和平均值,计算公式如式(11)所示 :
本文设置 β2=0.3,相对于召回率将精确度赋予更大 的权重。
AUC 指标广泛用于评估显著性模型。通过绘制真 正例率与假正例率的 ROC 曲线,可以得到 ROC 曲线, 最后,再计算 ROC 曲线下的面积作为 AUC 得分。
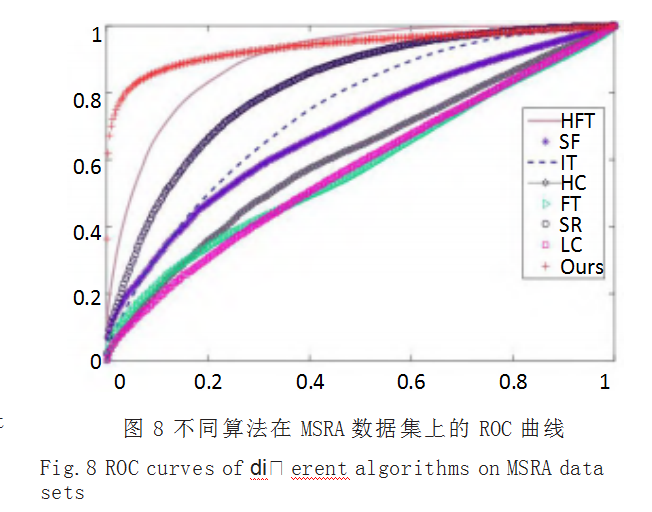
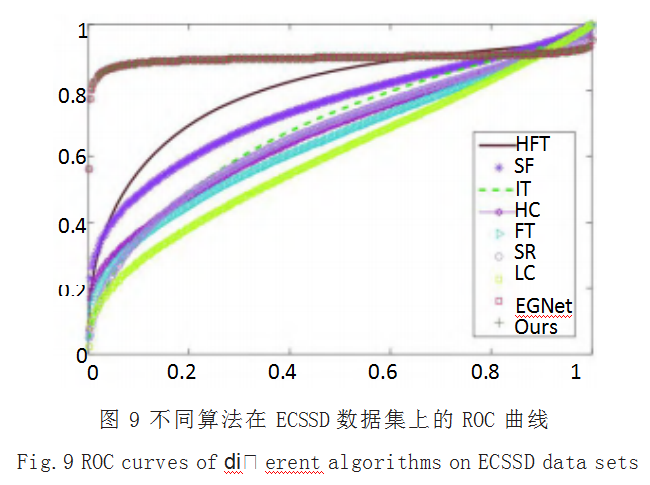
ROC 曲线衡量了在不同的判别阈值下,真正例和假 正例之间的权衡关系,阈值的变化范围从 0 到 255。ROC 曲线下的面积,也称为曲线下面积(AUC),是评估显著 性图的最常用指标。如图 8、图 9 所示显示了在 MSRA 和 ECSSD 数据集上计算的各种显著性检测方法的 ROC曲线,如表 1 所示显示了不同算法的 AUC 值。可以明 显看出,所提出的算法在非深度学习方法中表现出色。
在不同数据集中,每个图像都附带有反映现实世界 场景中常见挑战的属性,而这些有助于突显显著性目标 检测模型的优势和劣势。通过对不同数据集的实验和几 种评估方法进行比较,可以明显看出本文方法较大优于 其他传统算法。
3 结语
本文提出了一种基于背景先验知识的自底向上显著 性目标检测模型。与现有模型不同,本文背景模型不仅 建立在周围区域的信息上,还利用了颜色特征聚类和紧 致性,此方法的关键技术是通过使用特征聚类和每个聚 类的二维熵构建背景模型,并且所提出的模型解决了目 标位于图像边缘时的问题。然而,当目标的颜色与背景 相似时会导致漏检,造成此缺点的主要原因是本文只采 用了颜色特征,因此,在未来的工作中将考虑更多的特 征,例如纹理、形状信息等。此外,本文将扩展所提出 的方法应用于动态视频中的显著性检测以及其他应用, 如图像检索、图像分类和图像集合可视化。同时,也致 力于将所提出的方法扩展到处理流式图像数据的显著性 检测,这在计算机视觉和人工智能中也是一个重要但很 少被探索的主题。
参考文献
[1] 刘辉,刘鑫满,刘大东.面向复杂道路目标检测的YOLOv5算 法优化研究[J/OL].计算机工程与应用:1-11[2023-08-17].
[2] 曹禹,刘光宇,穆琳琳,等.基于多区域最优选择策略的声呐图 像目标检测[J].西北工业大学学报,2023,41(1):153-159.
[3] NGUYEN H T,LEE E H,BAE C H,et al.Multiple Object Detection Based on Clustering and Deep Learning Methods[J].Sensors (Basel Switzerland),2020,16(20):1-14.
[4] 薛俊达,朱家佳,张静,等.基于FFC-SSD模型的光学遥感图像 目标检测[J].光学学报,2022,42(12):138-148.
[5] 黎文江.基于深度学习的弱监督目标检测算法研究[D].重庆: 重庆大学,2022.
[6] AWAN M,SHIN J.Weakly Supervised Object Detection Using Complementary Learning and Instance Clustering[J]. IEEE Access,2020(99):1.
[7] KIM M G,BAE S H,KIM H.Real-Time 3D-LiDAR Object Detection in Autonomous Vehicle Systems Using Cluster-Based Candidates and Deep Learning[J].Journal of Institute of Control,2019,25(9):795-801.
[8] 丁静.烟雾环境下运动目标双目视觉定位技术研究[D].徐州: 中国矿业大学,2022.
[9] 方宝富,张旭,王浩.联合深度图聚类与目标检测的像素级分 割算法[J].模式识别与人工智能,2022,35(2):130-140.
[10] 张筱晗,姚力波,吕亚飞,等.双向特征融合的数据自适应 SAR图像舰船目标检测模型[J].中国图象图形学报,2020,25(9): 1943-1952.
[11] Supreeth H S G,Patil C M.Efficient Multiple Moving Object Detection and Tracking Using Combined Background Subtraction and Clustering[J].Signal Image and Video Processing,2018.
[12] 宋文青,徐玮,相飞.一种新的SAR图像目标检测像素聚类算 法[J].火控雷达技术,2020,49(2):1-5+11.
[13] 黄伟,杨文姬,曾璟,等.基于谱聚类和增量学习的运动目标 物体检测算法研究[J].西北工业大学学报,2017,35(1):170-176.
[14] 赵春晖,李晓慧,田明华.采用主成分量化和密度估计期望 最大聚类的高光谱异常目标检测[J].光子学报,2013,42(10): 1224-1230.
[15] PARK J,YOON H J,PARK M,et al.Dynamic Point Clustering with Line Constraints for Moving Object Detection in DAS[J].IEEE Signal Process,2014,21(10).
[16] 李广,冯燕.基于SIFT特征匹配与K-均值聚类的运动目标检 测[J].计算机应用,2012,32(10):2824-2826.
[17] KUMAR P S,PRIYADARSHI K,SATYASIS M,et al. Entropy Feature and Peak-means Clustering Based Slowly Moving Object Detection in Head and Shoulder Video Sequences[J].Journal of King Saud University-Computer and Information Sciences,2021,34(8PA).
[18] 杨志国,黄晓涛,周智敏.SAR目标检测中的聚类算法改进 [J].中国图象图形学报,2008,13(11):2132-2138.
[19] 羿昌宇,李旻哲.基于多伯努利密度聚类的多平台多目标融 合检测跟踪[J].数字技术与应用,2023,41(7):1-3.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/77143.html