



摘 要 :在《国家危险废物名录》中,医疗废物属于其中一种,医疗废物含有大量病原体和有害化学物质,具有感染性和 毒性,严重影响人的生命安全。医生和病人是离医疗废物最近的一批人,他们感染的风险较高,减少他们与医疗废物的接触机 会和时间是有效防护措施。为此设计制作一款能够室内巡航并自主拾取和倾倒垃圾的医疗废物处理垃圾桶,实现医疗废品处理 过程的零接触,为医生和病人的生命安全拉开一条保护线。
0 引言
在《国家危险废物名录》中,医疗废物属于其中一 种。它含有大量病原体和有害化学物质,具有感染性和毒性,严重影响人的生命安全。而医生和病人是离医疗 废物最近的一批人,他们被感染的风险较高,为保障他 们的生命安全,减少他们与医疗废物的接触机会至关重 要。传统的垃圾桶只有简单的开盖功能,不能进行垃圾 分类,并且位置固定,而市面上现有的智能扫地机器人 等移动产品,无法针对特殊的医疗废物进行拾取且没有 倾倒功能。针对以上问题,设计制作了一款能够进行室 内巡航、垃圾拾取、自主倾倒的医疗废物处理垃圾桶, 实现医疗废物处理过程的零接触。
1 设计全局思路
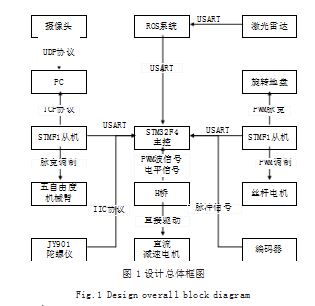
本产品使用 ROS 系统结合激光雷达和里程计数进行路径规划,实现室内自主导航、驾驶,利用 YOLOv5 神经网络图像识别算法对医疗废物进行识别、分类,设 计全自动桶式分类结构进行医疗废物的分类,安装机械 臂,结合图像识别与车体配合进行垃圾拾取。在垃圾桶 的底部布置丝杆电机,融合图像追踪、车体控制算法实 现垃圾倾倒。垃圾桶将扔垃圾、垃圾拾取、倒垃圾、垃 圾分类集中于一体,实现医疗废物处理全过程无接触, 同时连入互联网搭建云端服务器,形成智能控制终端 , 设计的总体框图如图 1 所示。
2 ROS 系统与路径规划
2.1 搭载 ROS 系统
ROS 操作系统提供了操作系统应有的服务,包括硬 件抽象、底层设备控制。根据 ROS 操作系统的特点分析移 动机器人系统结构,以提高废物运输效率,降低成本 [1]。
2.2 路径规划
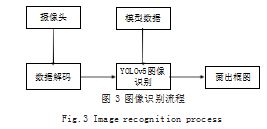
采用动态路径规划,使用激光雷达 +SLAM 实时栅 格地图构建方案。在使用过程中,激光传感器会向固定 的方向发射激光束,发射出的激光遇到障碍物会被反 射,这样就能得到激光从发射到收到的时间差,乘以速 度除以二就得到了传感器到该方向上最近障碍物的距 离。通过激光雷达即可得到周边环境的一些实时数据, 这时将激光雷达得到的数据包发送给 SLAM, SLAM 算 法可以有效地处理激光雷达实时测量中出现的一部分测 量误差。采用激光雷达 +SLAM 算法即可实现对于环境 实时栅格地图的构建,在栅格地图的基础上运用 A* 算 法进行最短路径规划。
2.3 AMCL 定位
AMCL 定位是粒子滤波算法,使用粒子密度表示事 件发生的概率,根据评估方程推算事件的置信度,并根据 结果再次调整粒子的分布情况。多次迭代后,粒子将分布 在可能性最高的区域,可以推算出车体在地图中的区域, 实现定位。路径规划的基本过程如图 2 所示。
3 YOLOv5图像识别
3.1 视频流获取
车体在工作时处于移动状态,将摄像头安装在车体前方用于捕捉画面。在固定位置的 PC 视频流处理机进 行图像识别,发现医疗废物。因为车体在不断移动,为 确保其路径内的废物都可以被发现,所以对视频流的实 时性要求较高。采用 UDP 协议进行视频流传输,车体 上的处理机将视频流进行编码,通过 UDP 协议将数据 发送至 PC 图像处理机,处理机将数据解码成图像即可 输入卷积神经网络进行图像识别。
3.2 图像识别
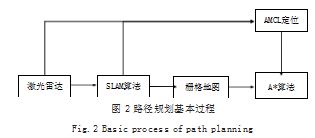
利用 YOLOv5 卷积神经网络进行图像识别以及模 型数据的训练,在进行图像识别之前对数据集进行收集 并将其送入神经网络经过训练后得到模型数据。开始图 像识别工作后将图像输入 YOLOv5 图像识别算法,将 得到的数据结果进行阈值调整,在图像中画出目标的位 置,即可完成一次图像识别,整体流程如图 3 所示。
4 医疗废物处理
4.1 室内巡航
初次使用将医疗垃圾桶放置在室内,它将进行室内 探索式建图,完成建图后即可进行室内巡航。将室内的 主要地点进行标定,用 ROS 系统发布路径规划话题, 对坐标点进行循环移动,在移动过程中通过车体前方的 摄像头进行医疗废物捕捉,当它移动到用户身旁时,用 户可以直接将废物放入其中。
4.2 废物拾取
完成图像识别后得到目标在图像中的位置信息,对 目标物进行 pid 计算,计算出机械臂与视野中目标的位 置偏差将其转换为角度信息,随即可通过 TCP 下发通 信指令,此时机械将做出对应响应移动机械爪,然后机 械臂通过 TCP 不断反馈角度信息至上位机,实现闭环 控制逻辑。当经过多次机械爪定位后,目标将进入视野中 心,此时上位机下达抓取指令,即可完成一次废物拾取。

4.3 废物分类倾倒
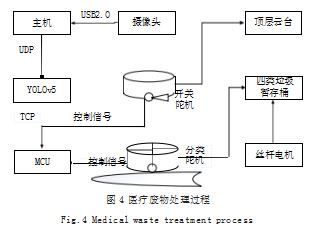
医疗垃圾桶拥有废物的直接拾取分类功能以及直接 放置分类功能。在储存桶下方安装 360 度舵机对四种垃 圾类型进行分类选择,在旋转桶上方安装了云台用于放 置激光雷达,安装开盖旋转舵机用于掉落垃圾。当用户 将垃圾放置云台中,垃圾桶将进行图像识别,完成识别 后将垃圾种类反馈至单片机,控制下方圆桶进行旋转分类,当对应夹层旋转至云台下方时,开盖舵机将自动打 开,此时垃圾自动下落,到此就完成一次垃圾分类。机 械臂拾取的垃圾不需二次识别就可以直接控制圆桶旋 转,机械爪将垃圾放入云台中即可直接掉入已经旋转好 的夹层中。垃圾分类的整体都是全自动完成的,圆桶结 构可以暂存部分垃圾,当垃圾量达到有废物倾倒需求 时,车体将自动移动到垃圾处理点进行垃圾的倾倒,整 体过程如图 4 所示。
5 智能控制终端
5.1 Web 后端
信息传输枢纽 :(1)使用 TCP 协议与微型电脑进 行数据传输,后端作为服务端,微型电脑作为客户端, 微型电脑传输坐标数据给后端, 后端将其存进 Mysql, 向微型电脑发送控制指令。(2)与 MCU 连接也是使用 TCP 协议,后端依旧作为服务端, MCU 对后端发送控 制指令,后端再将其发送给微型电脑。(3)与微信小程 序的数据传输则是使用 Ajax 和 Websocket。小程序通 过使用 Ajax 对后端接口进行请求,得到 MCU 数据传 过来的坐标 ;小程序与后端建立 Websocket,后面则 由后端主动向小程序垃圾分类数据发送数据。
5.2 微信小程序控制
(1)Canvas 画布的初始化。页面的生命周期开始 时,获取当前手机浏览的窗口大小,以此作为画布的宽度,再以地图比例计算出画布的高。(2)对地图的初次 渲染。设置 Canvas 画布内的绘画区域,获取容器的宽 高后进行 wx 像素的转换,以此保证无论任何设备打开 的地图都能按照比例固定且完整展示。(3)根据后端传 来的地图数据配置绘制地图,并且对当前 Canvas 绘制 上下文进行保存,也就是保存地图初始化的状态。(4) 由于 Canvas 的坐标轴起始点与硬件部分蓝牙建图的坐 标轴不一致,需要在获取定位点之前,将 Canvas 坐标 中心点平移到定位点初始位置,把地图进行像素缩放。 这一步确定了地图坐标的最大最小值,能匹配传过来的 坐标点的值。Ajax 发送 HTTP 请求,获取小车定位坐 标、当前位置和方向角后,恢复曾经的 Canvas 绘制上 下文,对地图进行重绘并绘出图标。此时把地图中心点 平移到当前坐标点,方便绘制出此时的方向角,获取方 向角度后再对坐标轴进行角度的扭转,此时就可绘制出 方向角了,整体框图如图 5 所示。
总的过程是要每一次绘制地图的时候对 Canvas 上 下文进行保存,进行地图中点转移等操作,绘出定位点 与方向角之后,恢复曾经的上下文,再对地图初始化。 请求每一次成功返回,都会对地图进行一次重建。
6 结语
本文介绍了无接触式医疗垃圾桶,将科技创新带到 医疗机构,改善医疗卫生环境,提高工作效率。所设计 的产品不局限于医疗机构,还可以工作于大型的办公场 景,使用路由器进行信息的交换。与传统的垃圾桶相 比,本文中的智能垃圾桶使用动静结合的方式,既可移 动到指定位置,也可放置在固定位置,同时能够实现垃 圾分类和集中倾倒,完成垃圾处理的全过程零接触。不 仅解决了垃圾桶不能进行垃圾分类、倾倒、不可移动等 问题,还提高了后续垃圾处理的效率, 一定程度上保护 了医护人员的安全。
参考文献
[1] 赵伟成.基于ROS无人车配送系统设计与实现[D].安徽:西南 民族大学电气工程学院,2023.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!

可解释性是一个非常重要的标准。机器学习模型... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
