SCI论文(www.lunwensci.com)
摘 要 :本文介绍了一种基于 AI 视觉的智能垃圾分拣系统。该系统利用 Jetson Nano 作为视觉处理器,具备强大的图像 处理和识别能力。主控部分采用 STM32.通过舵机构成的二维云台实现垃圾的准确分拣。系统设计了红外满载检测模块,能 够准确检测垃圾桶是否已满,并配备消毒系统,包括水泵和超声波雾化器,能够对垃圾桶进行定期消毒,提高卫生安全性。物 联网模块能够实时上报垃圾桶容量信息,并通过显示屏进行直观展示。系统还配备 MP3 模块,能够播放提示音,提醒用户正确 投放垃圾。该系统采用了 AI 视觉算法,通过训练和优化模型,能够准确识别不同类型的垃圾,并将其分拣到相应的垃圾桶中。
Intelligent Garbage Sorting System Based onAI Vision
MAYaohua
(Shandong Huayu Institute of Technology, Dezhou Shandong 253034)
【Abstract】:This article introduces an intelligent garbage sorting system based on AI vision. This system utilizes the Jetson Nano as a visual processor and has powerful image processing and recognition capabilities. The main control part adopts STM32. which achieves accurate sorting of garbage through a two-dimensional pan head composed of a servo. The system has designed an infrared full load detection module that can accurately detect whether the garbage can is full, and is equipped with a disinfection system, including a water pump and an ultrasonic atomizer, which can regularly disinfect the garbage can and improve hygiene and safety. The Internet of Things module can report the capacity information of garbage cans in real-time and visually display it through the display screen. The system is also equipped with an MP3 module that can play a reminder tone to remind users to correctly dispose of garbage. The system adopts AI visual algorithms, and through training and optimizing the model, it can accurately identify different types of garbage and sort them into corresponding bins.
【Key words】:AI vision;STM32;steering gear
1 背景与意义
近年来, 随着社会经济的日益繁荣, 居民的消费水 平逐步提升,对生活用品的需求量越来越高,随之产生 的垃圾数量也在与日俱增 [1]。人们对这些垃圾错误的处 理方式,不仅造成了居民地的水污染、土壤污染、大气 污染,严重损害着人体健康,而且已经对野外生态系统 环境带来了严重的负面影响。曾多次报道,在野生动物 体内发现一次性塑料袋 [2],这些垃圾由于无法被消化或 排出,给野生动物们造成了致命的伤害。人类发展过程 中,无可回避地要面对巨量的垃圾问题。就垃圾集中处 理方法而言,国内外主要针对不同类别垃圾采取不同措施的分类处理方式,对可回收垃圾进行回收再利用,对 可降解垃圾进行堆肥,对可燃烧垃圾进行焚烧,对无公 害垃圾进行填埋,对有害垃圾集中特殊处理 [3]。
计算机视觉技术可以模拟人的视觉过程,将图像 转化为数字信息并从中提取特征,从而使得机器对于 图像中的内容具有一定的辨别能力,这种辨别能力主 要包括对图像内容的分类、对图像中的各个物体分割 开、识别画面中的情感色彩等 [4]。采用基于深度学习 的计算机视觉技术可以完成对垃圾图像的快速分类, 将其应用于垃圾处理终端完成垃圾分拣工作,可以减 轻工人在肮脏环境中的工作量。将其集成于手机 App,利用手机摄像头拍照、读取手机相册等功能获取垃圾 图像,可以帮助人们区分垃圾类别,实现垃圾分类投 放,有利于促进垃圾分类意识的传播,引导人们形成 垃圾分类投放的习惯。
2 国、内外研究现状和发展动态由于我国经济发展起步晚,改革开放以来,为了 促进经济快速发展 , 将工作重心放到经济发展上,忽 视了环境保护方面的细节 [5]。近些年来,国家倍加重 视垃圾处理问题,大力推动垃圾分类理念向全国普及。 在 2021 年,国家发展改革委住房城乡建设部关于印发 《“十四五”城镇生活垃圾分类和处理设施发展规划》的 通知(以下简称《规划》),以推动垃圾分类工作在全国 范围内落实, 《规划》中进一步明确要求,到 2025 年底 预计实现全国有 60% 左右的城市生活垃圾资源化利用 率的目标。垃圾分类不仅可以拓展垃圾的资源价值,同 时也能够降低垃圾治理量和减少垃圾处理终端设备的使 用,缩减垃圾处理经济开支和用于掩埋垃圾的土地资源 的开销,避免掩埋、焚烧等垃圾处理方式产生的二次污 染,可以在经济、生态等方方面面获得收益。
我国在垃圾分类领域的发展取得了显著进展。2019 年,发布了《生活垃圾分类制度实施方案》,要求全国 范围内推行垃圾分类。这促使了智能垃圾分类技术的快 速发展和应用。例如,上海市推出了“垃圾分类智能 云”平台,通过智能垃圾桶和智能垃圾车实现垃圾分类 的自动化和智能化。清华大学提出了一种基于深度学习 的垃圾分类算法,通过训练神经网络模型实现垃圾的自 动识别和分拣 [6]。
在国外, 智能垃圾分类技术也得到了广泛应用。他 们引入了智能垃圾分类系统,包括智能垃圾桶和垃圾分 类机器人等。同时,国外等一些国家也在智能垃圾分类 技术方面进行了一些研究和应用,提出了一些创新的算 法和系统,并且在垃圾分类领域有着丰富的经验,通过 智能垃圾分类系统提高了垃圾分类的效率和准确性。
基于以上调研,我们提出了一个基于 AI 视觉的智 能垃圾分拣系统。
3 基于 AI 视觉的智能垃圾分拣系统设计
3.1 整体设计
系统采用 Jetson Nano 作为视觉处理器,具备强大 的图像处理和识别能力,通过 AI 视觉算法对垃圾图像 进行处理和分类。主控部分采用 STM32 作为主控芯片, 控制整个系统的协调工作。通过舵机构成的二维云台实 现垃圾的准确分拣,根据识别结果将垃圾投放到相应的 垃圾桶中。系统还设计了红外满载检测模块,准确检测垃圾桶是否已满, 一旦满载,发送信号进行及时处理。 消毒系统包括水泵和超声波雾化器,定期对垃圾桶进行 消毒,提高卫生安全性。物联网模块实时上报垃圾桶容 量信息,并通过显示屏进行直观展示。同时,系统配备 MP3 模块,播放提示音,提醒用户正确投放垃圾。结 构图如图 1 所示。
3.2 硬件设计
智能垃圾分拣系统的硬件设计包括图像处理和识别 模块、控制系统、分拣机构、红外满载检测模块、消毒 系统、物联网模块和用户提示模块。
3.2.1 图像处理和识别模块
系统采用高分辨率的摄像头作为图像采集设备, 通过传感器将垃圾图像传输给处理器进行图像处理和 识别。处理器使用多核处理芯片, NVIDIA 的 Jetson Nano,能够实时处理复杂的图像算法。图像处理软件 使用深度学习模型,卷积神经网络(CNN)进行垃圾 分类和识别,将图像分类结果传递给控制系统。
3.2.2 控制系统
系统采用微控制器(STM32)作为主控单元,负责 接收和处理图像处理模块传输的分类结果。微控制器通 过通信接口与图像处理和识别模块、分拣机构等设备进 行数据交互和控制信号传递。通过控制系统的精确计算 和控制算法,实现准确的垃圾分拣操作。
3.2.3 分拣机构
系统采用舵机和二维云台构成分拣机构,用于将垃 圾投放到对应的垃圾桶中。舵机驱动二维云台进行角度 和位置的精确调节,将图像处理模块识别出的垃圾准确 投放到相应的垃圾桶中。通过控制系统的指令,舵机实 现精确的动作控制,确保垃圾的准确分类和分拣。
3.2.4 红外满载检测模块
系统通过红外传感器实时检测垃圾桶的填充情况。 红外传感器通过测量垃圾桶内垃圾的高度,判断垃圾桶 是否已满。当垃圾桶即将满时,系统会发出信号通知清 洁人员及时清空,避免垃圾溢出的问题。
3.2.5 消毒系统
系统配备水泵和超声波雾化器,通过喷洒消毒剂对 垃圾桶进行定期消毒。消毒系统能有效防止细菌和恶臭 的产生,提高垃圾桶的卫生安全性。
3.2.6 物联网模块
系统采用无线通信模块(Wi-Fi)连接到云平台或 管理系统。该模块能够实现系统的远程监控和管理,包 括实时数据传输、垃圾桶状态监测和远程控制等功能, 提供便捷的管理和维护手段。
3.2.7 用户提示模块
系统配备 MP3 模块,可以播放不同类型垃圾的相 应提示音。通过提示音的引导,告知用户正确的垃圾分 类方式,引导用户投放垃圾到正确的垃圾桶,提高垃圾 分类的准确性和用户参与度。
垃圾智能分类装置由一套 STM32 单片机作为主控 芯片,用软件进行程序编辑。在其上集成一系列传感 器,并搭载视觉检测装置,无线通信传输数据。主控芯 片接收到遥控串口转发出的操作指令并解析操作指令, 再发出控制信号驱动相应模块执行发出的操作指令,主 控制器的软件主要实现以下的功能 :舵机运动控制、各 种传感器数据采集与传输、无线命令接收垃圾桶状态参 数回传。实物图如图 2 所示。
3.3 软件设计
3.3.1 视觉识别部分
(1)数据收集 :收集包含各类垃圾的图像数据集, 并进行标注。数据集应包含足够多的样本,覆盖不同角 度、光照条件、背景等场景,以提高模型的鲁棒性和泛 化能力。
(2)数据预处理 :对收集到的图像数据进行预处理,包括图像增强、图像缩放、裁剪、去噪、平衡化等操 作。预处理有助于提高模型对数据的识别和分类能力。
(3)模型选择与搭建 :根据任务需求, 选择了深度 学习模型架构卷积神经网络(CNN)。根据模型的复杂 程度和准确性的要求,选择了适当的预训练模型作为基 础(VGG、ResNet)。
(4)模型训练 :将预处理后的数据集划分为训练集 和验证集,通常采用常见的训练 - 验证集划分比例(70- 30)。使用训练集对模型进行迭代训练,通过反向传播算 法更新模型参数,不断优化模型。同时,通过验证集监 控模型训练的效果,避免过拟合现象的发生。
(5)模型部署与推理 :将训练好的模型部署到嵌入 式设备、服务器或云平台上,以实现实时的图像识别 和分类。通过输入待分类的图像,模型能够输出对应 垃圾类别的预测结果。在模型推理过程中,使用加速库 (TensorRT)和优化技术,提高推理速度和性能。
(6)数据增强 :为了增加数据集的多样性和鲁棒 性,可以应用数据增强技术对图像数据做进一步处理。 进行随机旋转、镜像翻转、亮度调整、加噪声等操作, 以生成更多样化的训练样本,提高模型的泛化能力。
(7)迁移学习 :迁移学习是利用预训练模型在大规 模数据集上学到的特征和权重作为基础,在目标数据集 上进行微调训练的技术。通过迁移学习,可以加速模型 训练过程、提高模型性能,并在数据集比较小的情况下 取得良好的分类效果。
(8)超参数调优 :超参数是模型训练过程中需要手 动调整的参数,学习率、批处理大小、正则化系数等。 通过交叉验证等方法,尝试不同的超参数组合,找到最 佳的参数配置,以优化模型性能和训练速度。
(9)模型优化和压缩 :为了在资源有限的设备上高 效运行,对模型进行优化和压缩。使用量化技术将网络 权重从浮点数转换为低位数,减少模型的尺寸和计算 量 ;使用剪枝技术剔除冗余的连接和参数 ;使用模型蒸 馏技术将大模型的知识传递给小模型等方式,以提高模 型的推理效率和速度。
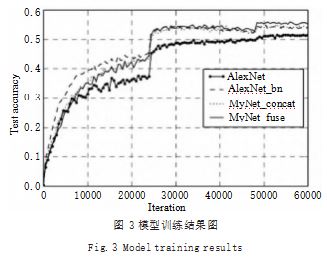
在视觉识别部分,系统采用了 AI 视觉算法,包括 图像识别、目标检测和分类算法。系统使用 Tensorflow 框架进行 YOLOv5 卷积神经网络深度学习模型训练, 再部署到 Jeston Nano 来进行图像识别。首先,系统通 过摄像头获取垃圾图像,并将其传输给 Jeston Nano 视 觉处理器进行图像处理。视觉处理器利用深度学习模型 对图像进行识别和分类,识别出垃圾的类型。然后,系 统通过控制舵机构成的二维云台,将垃圾准确地分拣到相应的垃圾桶中。通过训练和优化模型,系统能够提高 垃圾分类的准确性和效率。训练结果如图 3 所示。
3.3.2 App 上位机部分
在 App 部分,系统提供了一个用户友好的交互界 面 [7],方便用户进行垃圾分类和管理。用户可以通过 App 查看垃圾桶的容量信息,实时了解垃圾桶的状态。 App 还提供了垃圾分类的指导和提示,通过播放提示音 提醒用户正确投放垃圾。此外,用户还可以通过 App 设置定时消毒功能,系统将定期进行垃圾桶的消毒,提 高卫生安全性。通过物联网模块, App 能够实时接收垃 圾桶的容量信息,并进行显示和报告。用户也可以通过 App 进行远程控制和管理,提供了便捷的垃圾分类和管 理体验。
4 结论
通过以上的总体设计和流程分析,智能垃圾分拣系 统的设计和实现可显著提高垃圾分类和处理的效率和准 确性。采用先进的视觉 AI 技术和深度学习模型,能够 对垃圾图像进行实时分析和识别,准确判断垃圾的类 型,并通过控制系统和分拣机构实现精确的分类和分拣 操作。
该系统的硬件设计中,图像处理和识别模块负责图 像采集、处理和分类结果的传输,控制系统实现对垃圾分拣机构的准确控制,分拣机构通过舵机和二维云台将 垃圾投放到指定的垃圾桶中。红外满载检测模块可实时 监测垃圾桶的填充情况,消毒系统确保垃圾桶的卫生安 全,物联网模块实现系统远程监控和管理,用户提示模 块引导用户正确分类垃圾。
在视觉 AI 模型训练流程方面,通过数据收集、数 据预处理、模型选择与搭建、模型训练和模型评估等步 骤,能够训练出准确识别和分类垃圾的模型。数据增 强、迁移学习和超参数调优等技术能够进一步提高模型 性能和泛化能力。模型优化和压缩技术有助于提高模型 的运行效率和推理速度。持续监控和迭代改进可以不断 优化和改进模型,以适应实际应用场景的需求。
智能垃圾分拣系统基于视觉 AI 技术的设计和实现, 可以提高垃圾处理过程的自动化程度、减少人工操作和 错误率,促进垃圾分类和资源回收的可持续发展。这一 系统在实践中将发挥重要作用,为构建清洁、智慧的城 市环境做出积极贡献。
参考文献
[1] 罗明川.绵阳市居民生活垃圾分类治理的问题与对策研究 [D].成都:电子科技大学,2022.
[2] 别凯航.我国外卖衍生垃圾治理法律问题研究[D].昆明:昆明 理工大学,2022.
[3] 韦志文.基于机器视觉的分拣机器人设计与研究[D].淮南:安 徽理工大学,2022.
[4] 汪瑞霞.第二届“生态文明引领下的乡村振兴”国际研讨会 暨设计助力乡村建设青年论坛优秀论文集[M].连云港:江苏凤 凰美术出版社,2022.
[5] 王振,彭峰.全球碳中和战略研究[M].上海:上海社会科学院 出版社(双碳发展研究丛书),2022.
[6] 沈雪豪.基于视觉理解的家居服务机器人垃圾分拣关键技术 研究[D].株洲:湖南工业大学,2022.
[7] 王铭旗.基于“使用与满足”理论的移动App交互设计研究 [D].吉林:东北电力大学,2022.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/73733.html