SCI论文(www.lunwensci.com)
摘 要 :本文旨在基于智能导航和交通信号灯优化设计,构建城市智慧交通体系模型。文章首先介绍了基于智能导航和交 通信号灯优化设计结合的城市智慧交通体系应用背景,并探讨了智能导航系统及交通信号灯优化设计的研究概述。然后,文章 详细讨论了智能导航系统的组成及工作原理,并探讨了交通信号灯优化设计的部件和实现方式。最后,文章提出了智能导航系 统和交通信号灯优化设计的方法。此项研究为未来城市智慧交通体系的构建提供了重要的参考和指导。
关键词 :智能导航,交通信号灯,优化设计,城市智慧交通体系构建
Research on the Construction ofUrban Intelligent Transportation SystemBasedon Intelligent Navigationand Traffic Signal Optimization Design
DING Bo, YU Shulan
(Nanjing Forestry University, Nanjing Jiangsu 210000)
【Abstract】:This article aims to build a model of urban intelligent transportation system based on intelligent navigation and traffic signal optimization design. The article first introduces the background of the application of urban intelligent transportation system based on the combination of intelligent navigation and traffic signal optimization design, and discusses the research overview of intelligent navigation system and traffic signal optimization design. Then, the article discusses in detail the components and working principles of the intelligent navigation system, and explores the components and implementation methods of traffic signal optimization design. Finally, the article proposes a methodology for the optimal design of intelligent navigation systems and traffic signals. This study provides an important reference and guidance for the construction of future urban intelligent transportation system.
【Key words】:intelligent navigation;traffic signal;optimal design;construction of urban intelligent transportation system
0引言
随着全球城市化进程的不断加速,城市交通问题日 益突出,给人们的生活带来了许多困扰。交通拥堵不仅 浪费了大量时间和资源,还导致环境污染和经济损失。 因此,如何提高城市交通效率、减少拥堵成为了当今社 会亟待解决的问题。本研究旨在构建城市智慧交通体系 的模型,提出智能导航和交通信号灯优化设计方法。
1 城市交通系统中智能导航及交通信号灯原理分析
1.1 城市交通系统中的智能导航系统组成及原理
智慧城市中的智能导航系统由多个组成部分构成,这些部分共同协作,提供准确、实时的导航和交通信息 [1]。
智慧城市中的智能导航系统通过综合利用位置定 位、地图数据、实时交通信息和智能算法等技术,为用 户提供准确、实时的导航服务 [2]。首先,系统通过全球 定位系统(GPS)或其他定位技术准确定位用户位置, 并构建详细的路网模型 ;其次,利用地图数据和交通数 据库,系统计算最佳路径和预估交通状况 ;随后,通过 导航引导界面向用户提供实时导航指引。智能导航系统 通过智能决策和优化算法,根据用户的出行偏好和交通 状况,提供个性化导航建议,并通过交通信号灯优化等措施改善整体交通流动。
1.2 城市交通系统中交通信号灯控制系统
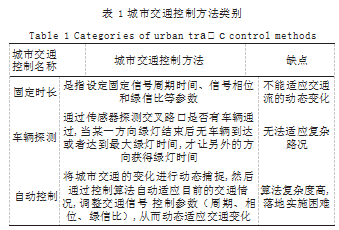
智能交通信号灯控制系统由实时交通数据采集、智 能信号灯控制算法和信号灯设备三个关键组成部分构 成。城市交通控制方法类别如表 1 所示。
2 城市交通系统中智能导航及交通信号灯的
2.1 城市交通系统中智能导航的优化设计
最短路径算法是智能导航系统中路径搜索和规划的 核心算法之一。最短路径算法旨在找到起点到目标点之 间的最短路径,它可以应用于不同类型的图或网络结 构,如道路网络、地铁网络等。常用的最短路径算法包 括 Dijkstra 算法、Bellman-Ford 算法和 A* 算法等。
其中, A* 算法是一种广泛应用于路径搜索和图搜索 问题的启发式搜索算法。它结合了 Dijkstra 算法的广 度优先搜索和贪婪最佳优先搜索的特点,能够有效地找 到从起点到目标点的最优路径。A* 算法在搜索过程中 每次选择具有最小值的节点进行扩展,直至找到目标节 点或搜索完整个图。
本案例基于限制搜索方向的改进,通过改进 A* 算 法的评估函数,在考虑距离的同时考虑搜索方向,通过 利用更多的启发信息 [3]。传统的 A* 算法估价函数公式 可表示为如式(1)所示 :
f (n) = g(n) + h(n) (1)
在传统的 A* 算法中,估价函数采用的是估计当前 节点到目标节点的距离,估价计算如式(2)、式(3) 所示 :
f (Vj 0) = g(i) + h(i) (2)
f (Vj1) = g(i) + h(i) (3)
这种估价方式只考虑了节点之间的距离关系,并没 有考虑到节点之间的方向关系。因此,将 h(n) 函数改进 如式(4)所示 :
h(i)=hr (i)*hd (i) (4)
其中 hr(i) 表示搜索方向对估价函数的影响部分, hd(i)表示距离对估价函数的影响部分,当前节点 i 的坐标为 (x,y),目标节点坐标为 (Xend,Yend),其计算公式如式(5) 所示 :
估价函数中搜索方向的影响部分 hr (i), 定义为如 式(6)所示 :
在求出 hr(i) 后,可得到改进的估价函数如式(7) 所示 :
2.2 城市交通系统中交通信号灯的优化设计
Q 学习是一种以 DQN(Deep Q-network) 为核心的 强化学习算法,用于在未知环境下做出最优决策 [4]。它 是基于马尔可夫决策过程(MDP)的理论基础,并通 过迭代的方式学习并更新动作值函数(Q 值函数)来寻 求最佳策略。
本案例中 Q-learning 算法在交通信号灯控制中的 应用思路有如下几点。
2.2.1 定义状态(State)
交通信号灯的状态,如红灯、黄灯、绿灯。
交通流量的状态,如高、中、低。
其他影响交通信号灯决策的因素,如时间、天气等。
2.2.2 定义动作(Action)
交通信号灯可以采取的动作, 如保持当前状态、切 换到绿灯、切换到黄灯、切换到红灯。
2.2.3 定义奖励(Reward)
设计一个奖励函数,根据交通信号灯的状态、交通 流量和其他因素来评估当前决策的好坏。例如,对于减 少交通拥堵和减少交通事故的决策可以给予正向奖励, 而导致交通堵塞或事故的决策可以给予负向奖励。
2.2.4 初始化 Q-table
创建一个 Q-table, 用于存储每个状态和动作的 Q 值。 初始时,Q-table 中的 Q 值可以设置为 0 或者随机值。
2.2.5 迭代训练
在每个时间步中, 根据当前状态选择一个动作。可 以使用 ε-greedy 策略,以一定的概率选择探索性动作, 以便发现新的最优策略。执行选择的动作,观察环境反 馈的奖励和新状态。
根据 Q-learning 更新规则, 更新 Q-table 中的 Q 值, 如式(8)所示 :
其中, Q(s,a) 表示在状态 s 下选择动作 a 的 Q 值,
α 是学习率, R 是当前状态执行动作后的奖励, γ 是折扣 因子, s' 是进入新状态后 A 的状态, a' 是在新状态下的 最佳动作。
重复以上步骤,直至达到停止条件(如达到最大迭 代次数或 Q 值收敛)。
2.2.6 根据学习到的 Q-table 进行决策
在实际应用中,根据学习到的 Q-table 中的 Q 值, 选择每个状态下的最佳动作作为交通信号灯的决策。
本案例提出一种新的交通信号灯优化方法,在 Q 学 习基础上采用 DTSE 方式,将车辆的位置-速度二维矩 阵图经过卷积网络进行特征提取,实现更高效的交通信 号控制。
(1)卷积网络。DQN 模型架构由三层卷积层和两 层全连接层构成,位置 - 速度二维矩阵图的状态信息输 入每一层模型 [4]。
(2)目标网络。设定某一参数 θ 来近似 Q 函数,以 函数逼近的方式取代表格记录 :Q(s, a;θ) ~ Q(s, a) ,即 如式(9)所示 :
Q,(s, a) = Q(s, a) + c(r + γmaxQ(s,, a,)-Q(s, a)) (9)
其中 :Q'(s,a) 为 Q 值的预测值 ;r + γ max Q(s ', a ') 为目标值。
损失函数定义为目标值与预测值的均方差,其表达 式如式(10)所示 :
L(θ) = (r + y max Q(s ', a ';θ') 一 Q(s, a;θ))2 (10)
(3) double DQN。本案例中 double DQN 的设计 步骤如下 :
1)定义状态(State) 和动作(Action):状态可以 包括交通信号灯的状态、交通流量的状态、交通拥堵情 况、道路状况等 ;动作可以是交通信号灯的决策,例如保 持当前状态、切换到绿灯、切换到黄灯、切换到红灯。
2) 初始化两个 Q-network :创建两个神经网络, 分别称为主网络(online network) 和目标网络(target network);主网络用于进行状态 - 动作值(Q-value) 的估计和动作选择 ;目标网络用于计算目标 Q 值,以减 少估计偏差。
3)迭代训练 :在每个时间步中,根据当前状态使 用主网络选择一个动作 ;执行选择的动作,观察环境反 馈的奖励和新状态 ;使用目标网络计算新状态下的最佳 动作, 并计算目标 Q 值 ;使用目标 Q 值和当前状态的 Q 值更新主网络的参数 ;定期更新目标网络的参数,例如 每隔一定的时间步骤或一定的训练次数。
4)根据学习到的主网络进行决策 :在实际应用中, 使用学习到的主网络中的 Q 值来选择每个状态下的最 佳动作作为交通信号灯的决策。
DDQN 通过使用两个网络和目标 Q 值的计算,可 以减少传统 Q-learning 算法中的过估计问题,提高 学习的稳定性和性能。DDQN 中目标值的计算公式如 式(11)所示 :
(4)ε-greedy 策略。 ε-greedy 策略是强化学习中 一种常见的探索策略。在这种策略中,模型有一定的概 率以随机方式选择一个动作,而不是根据已知的最优选 择来做出决策。它的作用就是控制 DQN 模型在整个学 习过程中设置探索概率 ε, ε 随着迭代次数而衰减, 其 表达式如式(12)所示 :
其中 :δmin为最小探索概率, λ 为衰减率 (0 < λ < 1), n 为迭代次数。
3.结语
城市智慧交通系统的构建研究,主要聚焦于智能导 航和交通信号灯的优化设计。通过对城市交通系统中智 能导航和交通信号灯原理的深入分析,我们可以看到它 们在提高交通效率、减少交通拥堵以及改善出行体验等 方面具有重要作用。在智能导航方面,系统通过对导 航算法和路线规划进行优化设计,实现了更加精确的定 位和导航功能。这不仅可以帮助驾驶员准确、高效地选 择最佳路线,还可以提供实时路况信息和导航引导,为 出行者提供更安全、便捷的出行体验。而交通信号灯的 优化设计则通过引入智能控制系统,实现了根据交通流 量和道路情况灵活调整信号灯的控制策略。通过定义状 态、动作和奖励等参数,并结合 Q-learning 等强化学 习算法进行训练和决策,使其交通信号灯可以更加准确 地根据实时交通情况进行调节,从而提高交通效率和减 少交通拥堵。总之,城市智慧交通系统的构建研究为城 市交通管理和出行提供了新的解决方案。通过智能导航 和交通信号灯的优化设计,我们可以有效改善城市交通 状况,提高交通效率,减少能源消耗和环境污染,并为 居民提供更加安全、便捷的出行体验。
参考文献
[1] 武强.多智能体强化学习在城市交通信号控制中的研究与应 用[D].兰州:兰州大学,2020.
[2] 朱旭东.基于车流量的自适应智能交通信号灯控制算法[J]. 电子世界,2019(4):100-103.
[3] 徐榜江.基于数据智能的实时动态导航关键技术研究[D].北 京:北京理工大学,2016.
[4] 宋国治,苏鹏博,刘畅,等.基于Q学习的智能交通信号灯优化 [J].郑州大学学报(理学版),2022.54(5):57-63.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/68413.html