SCI论文(www.lunwensci.com):
摘 要 :本文以工业机器人搬运码垛工作站为研究对象,利用 RobotStudio 仿真软件设计一个搬运码垛机器人仿真工作 站。首先用仿真软件 RobotStudio 进行工作环境的搭建 ;其次通过 Smart 组件设计,模拟生产线传送带依次出现产品的效果, 通过创建机器人 I/O 信号及工作站逻辑设计, 使吸盘工具可以搬运产品到达指定位置 ;最后, 编写机器人搬运码垛仿真程序, 使搬运码垛机器人仿真工作站的功能得以实现。
关键词 :RobotStudio ;工业机器人 ;搬运码垛
Design and Research of Robot Simulation Workstation for Handling and Palletizing Based on RobotStudio
【Abstract】:This paper takes the industrial robot handling and palletizing workstation as the research object, and uses RobotStudio simulation software to design a handling and palletizing robot simulation workstation. Firstly, using the RobotStudio simulation software to build the working environment; Then, through designing Smart component, the effect of products appears in sequence on the conveyor belt of the simulated production line, by creating robot I/O signals and workstation logic design, the suction cup tool can handle the product to the specified position; Finally, the robot handling and palletizing simulation program is written to realize the function of the handling and palletizing robot simulation workstation.
【Key words】:RobotStudio;industrial robots;handling palletizing
机器人被誉为“制造业皇冠顶端的明珠”,其研发、 制造、应用是衡量一个国家科技创新和高端制造业水平 的重要标志。现在工业机器人已被广泛应用在自动化产 线、物流配送等各个行业领域。根据工业机器人的用途不同,分为搬运、码垛、焊接、涂胶、组装等工业机器 人。其中,搬运码垛机器人被广泛应用于机床上下料、 自动生产线、集装箱的自动搬运等场所。搬运码垛机器 人能代替人工搬运,把人从劳动强度高、重复性高的工作环境中解脱出来,提高劳动效率,使搬运作业变得更 高效、准确,降低了生产成本 [1]。
本文以工业机器人搬运码垛工作站为研究对象,利 用 RobotStudio 仿真软件设计一个搬运码垛机器人仿真工作站,实现物料地搬运并根据实际要求进行码垛。
1 RobotStudio 虚拟仿真软件
工业机器人仿真技术主要应用于方案仿真、结构 与空间的验证、工艺节拍验证以及机器人技术研究等。 ABB RobotStudio 软件是瑞士 ABB 公司研发的与其工 业机器人设备相配套的仿真软件,具有强大的离线编程 和仿真功能以及友好的操作界面 [2], 通过 RobotStudio 软件,模拟工厂自动化生产线物料搬运过程,由工业机 器人将货物按照一定的规则或方式堆放在托盘上 , 让物 品的搬运、装卸、运输、存储等活动转化成单元化作 业,极大地提高了生产效率和安全性,降低了生产成本。
2 仿真工作站设计
2.1 设计内容
搬运码垛仿真工作站的设计主要依靠 RobotStudio 和 SoildWorks 软件。首先使用 SoildWorks 建模, 构建出创 建工作站所需要的物块以及真空吸盘,再用 RobotStudio 仿真软件创建一个新的工作站,选择合适的机器人及外围设备,并将创建的模型全部导入工作站,完成工作站 布局,进行系统参数的配置, I/O 信号的分配 ;然后对 Smart 进行设计,编写搬运码垛程序、示教搬运点和放 置点 ;最后进行程序的调试运行,实现工业机器人搬运 码垛工作站的仿真运行 [3]。
2.2 工作站布局
将传送带、工件等放置在机器人的运动范围内,保 证机器人高效工作。其他外围设备、防护装置等要放在 合适位置,避免影响机器人正常工作。
2.2.1 机器人选型
ABB 公司生产的 IRB 460 型号是全球最快的四轴 多功能工业机器人,在紧凑空间内汇聚了 ABB 产品中 的所有特点和技术,在保持了原来的紧凑、高效、高性 能的基本功能之外,还拥有了新的紧凑型结构,高精度 操作,成本低、编程简便,并使其在货物搬运、堆码等 过程中的效率得以最大化。IRB 460 可以提供在同类产 品中最佳的精确度和加速度,可确保高产量及低废品 率,从而提高生产效率。
2.2.2 模型创建
使用 SoildWorks 建立搬运码垛工作站所需要的物 块模型, 一个三角形模型和一个长方形模型,作为搬运 物块放在传送带上。
2.2.3 外围设备布局
外围设备包括机器人的底座、工具、安全防护装置、 安全防护内设备、防护装置外设备等。RobotStudio 软 件库中包含已创建好的模型,可以从库中选择后导入到 工作站里并放置到合适的位置。
2.3 系统创建
工业机器人系统是其编程、操作的基础, 在完成系 统布局之后,就需要添加操作系统,让其具备电气功能 并进行相应的模拟仿真操作。本次加载系统选择从布局 创建系统,选择菜单栏中的 [ 机器人系统 ]— [ 从布局 ]。 在弹出的界面中,编辑系统的名称和位置,选择 [ 机械 装置 ],在弹出的界面修改默认语言以及通讯方式等。
2.4 组件创建与链接
Smart 组件是一种智能化的组件,它具有自动化、 智能化、可编程、可控制等特性,可用于机器人、智能 家居、无人机、智能车辆、智能制造等应用领域。
在搬运码垛仿真工作站中,需要用到传送带机构, 确保工作站的正常运行,要建立 Smart 组件实现传送 带与物块的连接。在此次仿真工作站中,所用的 Smart 组件包括以下几种 :
(1)实现传送带和物块间的连接。首先构建传递带的 Smart 组件,添加线传感器 Linear Mover 组件, 能够实现 搬运物块的直接运动,添加面传感器 PlaneSensor, 用 来测量物块的位置, Source 组件可以实现对搬运物块 的拷贝、队列 Queue 组件可以实现物块的排序、逻辑 运算、仿真启动和停止,组件创建完成后对其进行信号 的连接,实现传送带传送搬运物块。
(2)实现吸盘的动态功能。建立动态吸盘的 Smart 组件,在 Smart 组件中加入了 Attacher 组件, 即安装一 个对象 ;Detacher 组件, 即拆除一个对象, LinSensor- 检查是否有一个对象和两点中间的线交叉,添加完成后进行属性设定及连接,最后通过 I/O 信号连接,实现吸 盘对搬运物块的拾取与放置 [4]。
2.5 I/O 设置
2.5.1 I/O 板卡创建
常见的 ABB 标准 I/O 板包括 DSQC651、DSQC652、 DSQC653 等。其中 DSQC651 是最常用的 ABB 标准的 I/O 模板, 主要提供 8 个数字输入信号、8 个数字输出 信号和 2 个模拟输出信号的处理。
在系统中定义 DSQC651 模板,参数设定为 :Name : Board10 ;Network :DeviceNet ;Address :10。
点击虚拟示教器上菜单按钮进入控制面板,点击设置, 单击“Device net Device”进入 I/O 板设置, 在“使用来 自模板的值”中选择“DSQC 651combi I/O Device”, 对 照 I/O 板配置表进行相应参数的设定,完成所有 I/O 功 能的设置。
2.5.2 I/O 信号创建
在虚拟示教器界面进入控制面板,点击配置,选 择 Signal 后进入信号设置界面 ;点击添加或增加输入 输出信息 ;点击 Name 设定输入输出信号名称 ;按照 实际情况依次选定输入或输出信号的类型、所在 I/O 单 元、地址等信息 ;完成所有配置后单击“确认”,并在 弹出的重新启动对话框中点击“是”进行重启。在搬运 码垛仿真工作站中,要设置的 I/O 信号依次为 :diP1、 diP2、doGrip1 等 [5]。
2.6 工作站逻辑
工作站逻辑是将 Smart 组件与机器人系统配置信 号进行相关联的配置,在本次研究中,工作站逻辑是 实现传送带 Smart 组件和机器人真空吸盘信号的关联, 实现物块到达指定位置时,机器人可以接收到指令拾取 物块。
3 程序编写与仿真
程序编写是实现工作任务的关键,搬运码垛仿真系 统可以在实操机器人之前进行仿真训练,及时解决在仿 真过程中遇到的错误和报警,既提高了操作能力,又减 少了危险的发生,安全性得以保障。
3.1 RAPID 程序编写
3.1.1 主程序的编写
PROC Main()
chushihua;
WHILE TRUE DO
IF diBoxInPos1=1 ANDdiPalletInPos1=1 AND bPalletFull=fiase then;
rPick1;
rPlace1 ;
ENDIF
IFdiBoxInPos2=1 AND diPalletInPos2=1 AND bFalletFull=fiase then;
rPick2;
rPlace2;
ENDIF
Waittime 0.1;
ENDWHILE
ENDPROC
3.1.2 例行程序编写
PROC rPick1()
MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50, tGrip\WObj:=wobjo;MoveJ Offs(pPick1,0,0,400),Ma xSpeed,z50,tGrip\WObj:=wobjo;
MoveLpPick1,MinSpeed,fine,tGrip\WObj:wobj0 ; Set doGrip;
WaitTime 0.3;
……
ENDPROC
ROC rPlace1()
Rweizhijisuan1 ;
MoveJ OffS(pPlace1,0,0,400),MidSpeed,z50,
tGrip/WObj:=wobjo;
Move L p Place1,Min Speed,fine,t Grip\ WObj:wobj0;
Reset doGrip;
WaitTime 0.3;
……
ENDPROC
3.2 仿真运行
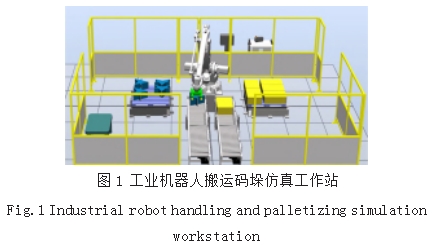
采用 RobotStudio 软件,根据实际生产情况对系统 进行离线编程以及仿真,实现了搬运码垛任务 ;不同形 状的物料通过传送带输送出来, 物块到达指定位置后由传 感器输出信号,机器人接收信号去拾取物块,根据形状的 不同分别按要求放置码垛。仿真运行结果如图 1 所示。
4 结语
我国工业技术发展已经得到了质的飞跃,当代人工 智能技术已经成为工业 4.0 的核心技术,智能生产正在 取代人力生产。搬运码垛工业机器人代替人工重复繁琐 的工作,让其从繁杂无味的工作环境中解脱,研究更完 善、功能更多的搬运码垛机器人已经刻不容缓,相信 未来的工业机器人系统功能会更加强大,技术更加多样 化、系统化、智能化、综合化。
参考文献
[1] 王宁.中国工业机器人贸易格局、竞争力与发展策略[J].对 外经贸实务,2021(8):65-70.
[2] 刘海燕,苏宇,林春兰,等.基于RobotStudio的生产线下料系 统设计与仿真[J].制造技术与机床,2019(5):67-71+75.
[3] 孙立新,高菲菲,王传龙,等.基于RobotStudio的机器人分拣 工作站仿真设计[J].机床与液压,2019,47(21):29-33.
[4] 祁晓玲.基于RobotStudio的生产线搬运工作站的仿真设计 [J].机械工程与自动化,2021(6):45-47.
[5] 王小刚,李飞.工业机器人搬运工作站仿真应用研究[J].机械 工程与自动化,2022(2):93-95.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/67547.html