SCI论文(www.lunwensci.com)
摘 要:无人机因其环境、民用和军事应用而受到广泛关注。由于其低成本和部署灵活性,具有通信功能的无人机有望在 5G、6G 移动网络等领域发挥重要关键作用。然而, 诸如无人机在高空的自由空间传播行为, 以及暴露于天线旁瓣等变量, 可 能会导致无线电环境的变化。无人机网络中有限覆盖区域的错误传输,可能会出现更多问题,例如频繁切换。由于无人机特性 的这些差异,在未来移动网络中的部署将面临与移动性和切换过程有关的关键技术问题。因此,无人机网络需要更高效的移动 性和切换技术,以持续保持稳定可靠的连接。本文综述了移动通信网络中互联无人机切换管理方面的大量研究,强调了实现互 联无人机所面临的与切换相关的挑战。
关键词:无人机网络,5G 和 6G,旁瓣,切换
Future Networks for Drones and Challenges of Handover
DONG Chunli, WANG Li
(College of Electronic Information Engineering, Nanjing Vocational Technical Institute of Traffic, Nanjing Jiangsu 211188)
【Abstract】: Drones have received widespread attention due to their environmental, civilian, and military applications. Due to its low cost and deployment flexibility, unmanned aerial vehicles with communication capabilities are expected to play a crucial role in 5G, 6G mobile networks, and more. However, variables such as the free space propagation behavior of drones at high altitudes and their exposure to antenna sidelobes may lead to changes in the radio environment. The erroneous transmission in limited coverage areas in drone networks, more problems may arise, such as frequent switching. Due to these differences in drone characteristics, the deployment of drones in future mobile networks will face key technical issues related to mobility and switching processes. Therefore, the drone network requires more efficient mobility and switching technology to continuously maintain stable and reliable connections. This article reviews a large amount of research on handover management of interconnected drones in mobile communication networks, emphasizing the challenges related to handover faced by implementing interconnected drones.
【Key words】: drone network;5G and 6G;sidelobe;handover
无人机最近被纳入蜂窝架构中的用户设备(UE)。 控制链路包含两个主要组件 :无人机和操纵它的人之 间的点对点连接,以及在无人机终端和地面控制站之间 建立蜂窝网络连接的链路。无人机还可作为空中基站 (BS),在特定位置为 UE 提供服务。当无人机用作空中 BS 时,它们可支持真正的地面无线网络的连接,例如 宽带和蜂窝网络。与传统地面站相比,使用无人机作为 BS 的优势在于它们能够改变其高度,避开障碍物,并提高为地面用户创建视线(LoS)通信链路的可能性 [1]。
1 无人机网络
连接到移动网络的无人机在实现各个领域的广泛服 务方面发挥着关键作用。移动时保持稳定通信链路的必 要性,是一项必须彻底调查的重大挑战。本节分析了连 接到移动网络的无人机网络。
1.1 无人机在移动网络中的应用
由于无人机对各个领域的广泛解决方案的贡献,近年来无人机的使用量急剧上升。无人机具有 3D 空间高 机动性、自主操作、灵活分布等独特特性,这使得它们 成为众多应用的有吸引力的解决方案,包括民用、安 全、工业物联网(IIoT)、国防、网络物理系统,以及 大气和生态监测。无人机与 6G 通信服务结合使用时, 在各种市政和商业中非常有用。如图 1 所示是无人机系 统架构、解决方案和未来移动网络中的集成。
无人机可通过充当 BS 或空中 UE,来有效地提供 无线通信服务。无人机可建立多个连接,例如,无人机 到无人机网络、无人机到地面移动服务网络、无人机 到地面移动用户和无人机到卫星网络。一些文献调查了 在 HetNets 中充当 BS 的无人机,该研究的重点是改善 地面 UE 无线覆盖,使无人机能够在无法通信的区域使 用。此外,它们可通过充当 UE 和 BS 之间的数据中继 来协助网络。无人机是支持自适应高度的飞行平台,大 多数新兴应用都需要安全可靠的无线通信系统,该系统 具有与 BS 的高度低时延,和组织良好的信息交换。在 目前的应用中,无人机往往配备专门的通信设备或传感 器,以提供各种服务,如低空监视、后勤应用、灾后救 援和通信支持。
研究了两个主要工作方向 :将无人机集成到适当的 蜂窝网络方案中以实现平稳服务,以及针对特定用例的 通用连接。如图 2 所示,这种集成允许无人机在三个方 向上服务,同时还需分析由于这种整合而产生的系统和 技术问题。
1.2 无人机的连通性
确保无人机的平稳、可靠和持续连接是移动无线网 络实施无人机面临的主要挑战之一。为了提供互联无人 机的可靠连接,已经提出了许多用于连接和网络管理的 解决方案。例如,文献 [2] 中的作者提出了一种机器学 习方法和大规模多输入多输出(MIMO)设计,以分别 增强连接无人机的连通性和安全性。同时,还引入了一种控制方案,该系统管理无人机飞行,与有人驾驶飞机 管理方案相协调,将天气预报等附加信息被馈送到无人 机的控制系统。
实施无人机识别机制来识别、跟踪、指挥和控制无 人机和无人机机队操作员。身份验证和授权过程对于提 供安全通信至关重要。该系统可实现车对车(V2V)通 信,同时避免碰撞。无线连接是建立 V2V 通信,并同 时提供网络管理所必需的。可通过许可或非许可频谱 实现连接,前者可通过卫星通信或利用地面蜂窝网络建 立,这通常更可取。
1.3 4G/5G 网络中的无人机
目前用于自动驾驶汽车的 4G 和 5G 新无线电(NR) 技术用于车联网(V2X)通信,可能适用于无人机通 信。5G NR 可通过侧链路连接自动驾驶汽车和基础设 施, 从而实现非视距(NLoS)可见性和可预测性,以 实现进一步的交通控制和自动驾驶改进。由于无线网络 是专门为地面移动用户设计的,因此 4G 和 5G NR 的使 用可提供网络连接, 例如, 无人机到无人机(U2U) 和 无人机到基础设施(U2I)。但是,这些并不能保证完全 的网络覆盖。无人机也可用作 BS,在自然灾害造成的、 覆盖范围有限的偏远环境中,提供 4G 和 5G 服务。现 有的 4G 和 5G NR 地面网络固定在特定位置,可支持地 面用户,或沿预定路线行驶的车辆。4G 和 5G NR 系统, 可为使用 U2U 和 U2I 模式的超低空无人机网络提供通 信,但是,它们可能存在覆盖范围和其他移动性问题。
1.4 6G 网络中的无人机
当无人机与 6G 通信服务相结合时,无人机在各种 公民和商业应用中非常实用,允许智能自动化和人工智 能(AI)的集成,为超智能城市和万物互联(IoE)、扩 展现实(XR)(包括增强现实(AR)、虚拟现实(VR) 和混合现实(MR)等新服务铺平道路,自主连接(如 自动驾驶汽车)、无线脑机交互(WBCI)和基于 AI 的 服务 [3]。6G 预计将提供 100 倍的无线连接和数倍于 5G的性能。推动 6G 发展的最重要创新是卫星连接、无人 机、机器学习、互联智能、太赫兹(THz)频段、光无 线通信(OWC)、无线电力传输和 3D 网络。
1.5 配备物联网的无人机网络
物联网是将我们周围的一切连接到互联网的系统。 焦点最近转移到无人机上。除了其他服务外,物联网还 支持无人机可提供的众多应用。然而,将无人机转变为 “飞行物联网”存在障碍, 例如某些应用所需的大量数 据,以及 LoS 和 NLoS 中的通信模式选择。成本和效 率之间存在权衡,因为无线通信限制了可访问性,相比 之下,卫星通信更昂贵。
2 无人机网络中的切换挑战
连接到蜂窝网络的无人机将是一个重要的基础设 施,在各种环境中提供广泛的服务。在它们运动期间保 持稳定通信,是必须强调的一个重大挑战。由于分层连 接和移动特性,为联网无人机的实施带来了一些挑战, 切换时将导致高切换率,造成大的乒乓效应,高无线链 路失败(RLF),切换失败率(HOF)。由于移动用户的 高速、切换控制参数的次优设置、低效的切换决策,以 及其他相关因素,RLF 和 HOF 都可能增加。
2.1 无人机的连通性
确保无人机的平稳、可靠和持续连接,是通过移动 无线网络实施无人机面临的主要挑战之一。在多层空域 飞行的无人机需要无缝连接,这是网络规划和实施所必 需的。广泛的网络覆盖范围可确保无人机自主飞行时的 无缝连接。然而,覆盖高度广泛,并保持可靠的通信, 是 4G/5G 蜂窝网络面临的重大挑战。这是由不同的因 素造成的,例如无人机的快速移动、不同的轨迹、LoS 连接引起的高干扰水平以及 3D 运动。此外,无人机 在天空中的移动速度比 UE 快,导致 RSRP 差异很大, 这将导致连接的无人机,比地面 UE 更频繁的切换 ; RSRP 的这种巨大差异,可能会很快导致无人机和服务 网络之间的连接丢失 ;无人机使用的快速增长,将需要 大容量的回程连接,以确保其可靠和流畅的连接 ;与 5G 的连接密度相比, 6G 中由超密集异构网络组成的多 层网络,可将高密度生态系统中的连接无人机数量提高 约 10 倍,这也会对无人机的连通性产生负面影响。
2.2 4G 和 5G 网络的无人机挑战
4G 和 5G-NR 系统可用于使用 U2U 和 U2I 模式, 为超低空无人机网络提供通信。然而,它们可能存在覆 盖范围问题, 而无人机在 3D 和更高的高度飞行, 进一 步克服了移动性挑战。相比之下,无人机能够以非常高 的速度,在太空中的任何 3D 方向上随机且不连续地移动。虽然 5G 可处理 2D 模式,但它可能存在障碍问题, 使 3D 模式难以处理。由于在 BS 中使用定向天线, 5G 的连通性有限,需要频繁切换高机动性无人机。为了覆 盖空中的高密度无人机,必须在整个 BS 中安装额外的 天线,这可能很昂贵。考虑到未来十年开发技术和服务 的机会,迫切需要从 2D 基础设施覆盖范围, 转向完全 3D 原生服务。
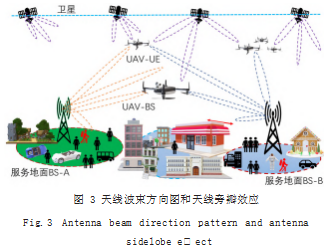
2.3 旁瓣
如图 3 所示,由于天线不是全向垂直的,主瓣可能 无法正常为无人机服务。尽管已经做出了研究努力,但 这个问题仍未解决。文献 [4] 已经表明,当无人机暴露 在自由空间传播条件下时,旁瓣的影响在高海拔地区得 到了缓解。旁瓣是定向天线远场方向图的一部分,在主 方向之外的方向上发射。由于旁瓣的场强低于主瓣,地 面用户通过向下倾斜天线来连接主瓣。由于无人机在高 空飞行,因此可能容易出现不需要的旁瓣。天空可能没 有被基站的旁瓣完全覆盖,这也会进一步增加切换的概 率,导致没有天空覆盖和随后的链路故障。
2.4 高移动速度
在飞行中控制无人机的运动是无人机操作中最具挑 战性的方面之一。无人机在大气中的运动极其复杂且难 以控制。例如,无人机的高移动性和任意加速度会导致 获得的信号频率突然和瞬时变化。接收信号的快速变化 也增加了切换和其他移动相关问题的可能性。因此,目 前的切换技术对于无人机来说可能还不够。
2.5 切换自优化函数
另一个问题来自处理切换控制参数的切换自优化函 数,例如,移动稳健性自优化和负载平衡自优化函数。 迄今为止,文献中已经开发了几种切换控制技术来优化 切换控制参数,但现有的技术可能无法有效地与无人机 一起工作。鉴于天空中飞行的无人机和地面用户之间的关键区别,将会带来重大挑战。
2.6 其他移动性问题
决定网络性能的其他关键参数包括 QoS、带宽、功 率水平、覆盖范围、高频频段的使用和时延。由于无人 机的高机动性,无人机网络更容易受到频繁切换的影 响。传统的切换机制将是无效的,新技术必须考虑无人 机网络将面临的潜在挑战。
3 结语
无人机是地面 BS 或 UE 的流行替代品,由于功耗有 限、丢包或网络密集,无人机操作过程中可能会出现各种 挑战,使得切换过程对于有效数据传输至关重要。研究 趋势表明,在未来的移动网络中,无人机在移动蜂窝网 络、卫星网络和其他传统技术(如 MANETS、VANET 和 IEEE 802.11)中的集成将是主要解决方案的一部分。 与传统方法相比,基于机器学习和深度学习的切换模型 在重叠区域的成功率更高,评估开销更少,这表明该技 术可能是管理无人机切换问题的成功解决方案。
参考文献
[1] SHAYEA I,DUSHI P,BANAFAA M,et al.Handover Management for Drones in Future Mobile Networks-A Survey[J].Sensors,2022(22):1-36.
[2] CHANDHAR P,LARSSON E G.Massive MIMO for Connectivitywith Drones:Case Studies and Future Directions[J].IEEE Access,2019(7):94676‒94691.
[3]CHOWDHURY M Z,SHAHJALAL M,AHMED S,et al. 6G Wireless Communication Systems:Applications, Requirements,Technologies,Challenges,and Research Directions[J].IEEE Open Journal of the Communications Society,2020(1):957-975.
[4] YANG C,LIN Z,YING C L.Deep Reinforcement Learning for Multi-User Access Control in UAV Networks[C]//IEEE International Conference on Communications,2019:1-6.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/63395.html