SCI论文(www.lunwensci.com):
摘 要:本文针对基础设施薄弱地区以及轨旁通信能力不足情况,基于临近空间静态滞空浮空器平台与动态滞空无人机平 台,设计了一套面向轨道交通信息服务的空天车地一体化移动通信系统。在分析关键技术指标的基础上,设计论证了系统主要 参数,详细论述了各子系统组成及系统工作流程。最后进行了验证测试,结果表明,本文所设计系统满足各项指标要求。
关键词:轨道交通 ;空天车地 ;移动通信
Design of Mobile Communication System in an Integrated Air Space Vehicle Ground Environment
【Abstract】:A mobilecommunication system is designed for railway transit information service in an integrated air space vehicle ground enviroment, based on nearby space static aerostat and dynamic unmanned drone, focus on the scenarios of insufficient trackside communication capacity in areas with weak infrastructure. The main parameters of the system are demonstrated, and the composition and workflow of each subsystem are discussed in detail, on the basis of analyzing key specifications. The result of the verification tests show that the design of the system meets the requirements of the specifications.
【Key words】:railway transit;integrated air space vehicle ground environment;mobile communication
0 引言
目前,轨道交通主要通过列车与轨旁蜂窝通信系统 基础设施连接,构成列车移动通信系统实现列车信息服 务,国内外都已经实现了相关技术与系统应用 [1,2]。这些系统严重依赖于完善的通信基础设施来构建列车信息网, 对于通信基础设施薄弱地区,现有方法将面临挑战 ;同时,蜂窝网络的脆弱性将严重制约车联网对突发事件的应急响应效能 [3]。一个在传统轨旁通信基础设施能力不足、自然灾害甚至人为破坏的条件下,依然有效支持信息传输的新技术是极为迫切的。基于临近空间静态滞空浮空器平台与动态滞空无人机平台, 设计面向轨道交通信息服务的空天车地一体化移动通信系统,是很好地解决途径。
1 系统参数设计
浮空器作为通信网络的中心节点长时间驻留空中, 与无人机、列车等建立移动数据链路,组成空天车地立体环境下移动通信系统。系统满足空中平台大范围通信的需求(覆盖范围 300km,半径 150km),主要功能是实现各节点(无人机、列车、汽车等)与浮空器之间的数据传输,形成一个以浮空器为中心节点的点对多点星型网络。
1.1 主要指标
(1) 网络容量 :最大10 节点,系统容量 20Mbps ;
(2)节点数据带宽 :256Kbps ~ 2Mbps(可调整);
(3)最大通信距离 :150km ;
(4) 节点移动速度 :0(固定站)/120km/h(无人机或公路车辆)/350km/h(高铁) ;
(5)网络拓扑 :星形网络 ;
(6)网络接入 :支持随遇入网 / 退网 ;
(7) 业务类型 :基于 IP/ 以太网的综合业务(视频、 音频和数据)。
1.2 网络工作模式
空天车地移动通信系统作为用户(节点)接入网,采用 TDD+TDMA 工作模式,工作频段采用 L 频段(1.2~ 1.5GHz)。这一考量基于以下几个方面 :(1)这一频段 链路传播损耗相对较低,而浮空器和部分移动节点的天线部署空间受限,无法采用较大尺寸的天线 ;(2)相对于传输损耗更低的 UHF 频段,频率资源相对富裕 ;(3) 国家无线电管理局为无人机审批开放的频段在 L 频段 (1.4GHz) ;(4) 相对于 S 或 C 频段,L 频段的功放效率更高,可以满足浮空器和无人机供电受限的要求。
1.3 链路分析
根据实飞测试, 空地通信信道信号传播损耗基本符合通用自由空间传播模型 [4]。1.2GHz 频段信号,150km 基 本传播损耗为 139dB。考虑高速移动造成快变信道 [5], 预留 6dB 动态裕量, 因此链路预算为 145dB。L 频段/20MHz 接收机灵敏度工程实现可设定为 -90dBm(3/4FEC+QPSK, NF=3dB),空地通信信道可近似为动中通卫通信道, 最大收发增益储备需达到 55dB,功率放大器设计提供 40dBm/ 通道(10W),那么要求浮空器基站与移动节点间收发天线合计增益需达到 15dB 以上。采用扇区阵列天线,可以达到这一设计要求。
1.4 传输速率
系统总数据带宽设定为 20Mbps(10 个 2Mbps 节 点同时工作),数据传输效率不低于 100%- (纠错 + 抗 多径 + 捕获同步 +MAC) ≈ 70%, 故空口速率要求至少为 29Mbps。采用 20MHz 射频带宽及 QPSK 调制方式,滚降系数 0.25,则能够达到 32Mbps 的空口速率, 满足系统需求。
1.5 数据延时
系统如采用 10:1 TDD 时隙(基本帧长度)架构(1 时隙 / 节点),每个基本时间信道时隙设计为 1ms(含收发切换与硬件处理时间余量),则理论最大传输延时(上 行 + 回程) 为 11ms+150km 上行空中传播延时 +100 公 里下行空中传播延时≈ 11ms,完全可以满足视频传输 和无人机遥控(30ms 延时)等延时敏感应用需求。
1.6 组网方式
随遇入网 :节点使用接入竞争时隙、以侦听—随机竞争方式(扩频码捕获同步)发起入网请求。接入竞 争时隙紧邻基站下行广播时隙,可确保节点向基站上行 同步,从而确认接入竞争时隙。
退网 / 脱网 :基站本地建立并在每次复帧结束前更 新网络节点时隙分配表,连续三次已为其分配时隙、而未收到其上行数据的节点视为已退网 / 脱网,列表中删 除该节点,并在下行帧中全网广播通报。
2 子系统设计
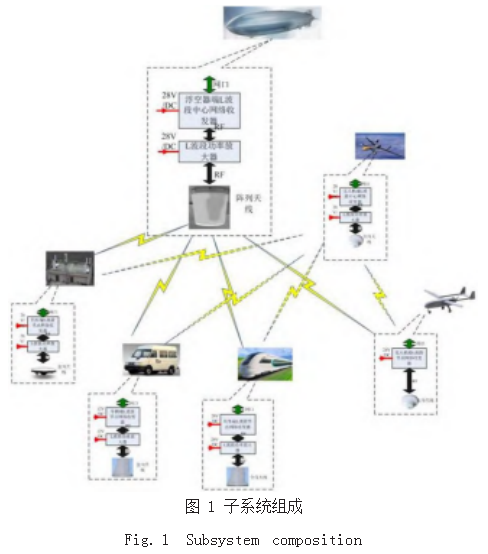
空天车地移动通信系统分为浮空器通信中继子系统、无人机通信中继子系统、无人机移动通信终端子系统、 列车移动通信终端子系统、车辆移动通信终端子系统、 地面固定通信终端子系统共 6 个子系统,如图 1 所示。
(1)浮空器通信中继子系统用于空车、空空宽带数 据汇聚。系统由 L 频段中心网络收发器、L 频段功率放 大器、浮空器天线三部分构成。
(2) 无人机通信中继子系统是浮空器通信中继子系统 的备份系统, 在浮空器通信中继子系统不能工作时, 作为中心节点工作。由于机载天线的增益远小于阵列天线, 所以通信距离会有所下降,通信距离大约为 20km。
(3)无人机移动通信终端子系统用于无人机数据采 集,采集的数据通过空天车地移动通信系统回传至浮空 器。系统由无人机端 L 频段节点网络收发器、无人机全向天线两部分构成。
(4)列车移动通信终端子系统用于列车信息采集, 采集的数据通过空天车地移动通信系统回传至浮空器。 系统由列车端 L 频段节点网络收发器、L 频段功率放大 器、全向天线三部分构成。
(5)车辆移动通信终端子系统用于车辆信息采集, 采集的数据通过空天车地移动通信系统回传至浮空器。 系统由车辆端 L 频段节点网络收发器、L 频段功率放大 器、全向天线三部分构成。
(6)地面固定通信终端子系统用于地面场站值班室 人员进行调度指挥,数据通过空天车地移动通信系统回 传至浮空器。系统由固定端 L 频段节点网络收发器、L 频段功率放大器、全向天线三部分构成。
3 核心工作流程设计
系统的总体设计目标是实现一整套面向空天车地立 体环境,针对轨道交通领域应用的专用移动无线传输系 统,适于空天车地立体环境下高数据速率、高动态信道 环境传输应用。
3.1 数据收发工作流程
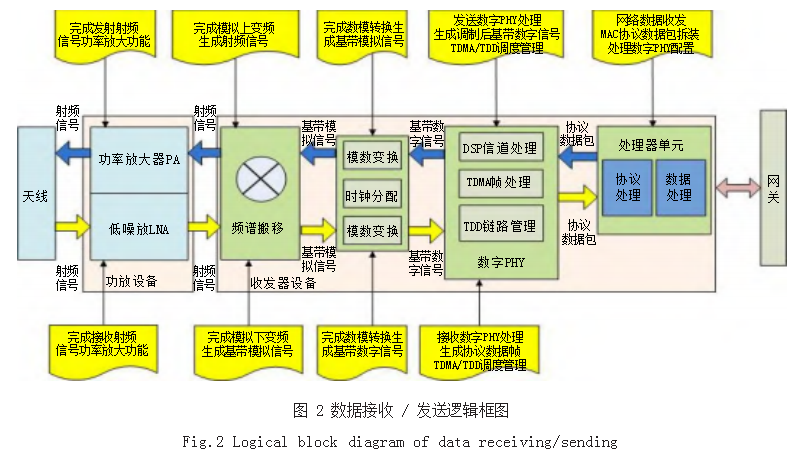
数据发送 / 接收通信过程,是本次系统设计的核心 功能。该项功能主要是通过网络收发器、功放、天线等 设备协同实现的,功能实现的逻辑框架图如图 2 所示。
发送数据时,来自于网关设备的数据经网口进入收发器,通信装帧处理转发后成为收发器时间同步的以太网数据 ;通过设备内部高速数据接口进入数字信号处理单元进行数字编码和数字调制,形成发送 I/Q 差分数据流 ;经过数模转换后由数模转换器变换为基带发送差分模拟信号 ;经基带模拟信号通道进入频谱搬移单元,上 变频为载波信号 ;经线性功率放大器放大后由天线辐射 进入无线信道。
接收数据时,将来自天线的射频信号经 LAN 放大 和下变频成为 I/Q 差分基带模拟信号,模数变换后形成 I/Q 差分接收数据流,经数字信号处理单元完成同步、 解调、信道译码等处理后在 TDMA 状态机控制下形成协议数据帧块。数据帧块经 AXI 高速接口送入处理单元进行 MAC 协议解析与网络数据还原,之后经网口将 数据发往网关设备。
3.2 网络时间同步设计
针对多设备时隙同步问题,采用由浮空器中心网络 收发器发起的同步周期修正机制,即浮空器基站时隙内 的上行数据帧,在完成向各节点网络收发器传输控制数据的同时,兼做周期同步修正时标,节点收发器仅需 在两次修正期间内保持短期相对稳定即可,这一周期 仅为若干毫秒,因此即使采用低稳定度时钟,如此短 暂时间内也完全可以认为时钟是充分稳定的,可以满 足 TDMA 时隙的精度要求(us 级)。TDMA 协议设计 预留保护间隔,即空中无线信号传播时延补偿(对应 150km 最大 500us)和处理时延补偿(收发切换、硬 件处理时延和软件处理时延,总量小于 50us)。
4 测试验证
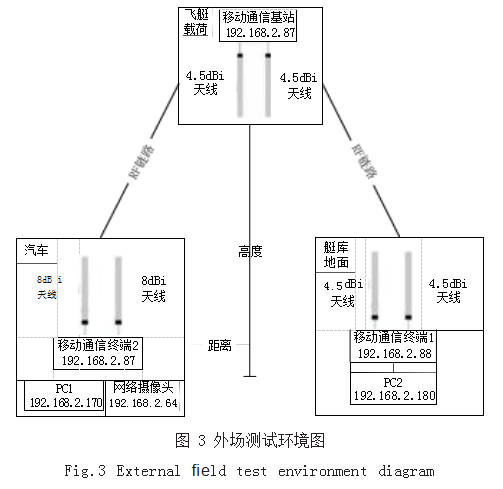
如图 3 所示,浮空器中继终端是中心节点,位于飞 艇载荷舱,移动通信终端 1 位于艇库固定位置,移动通 信终端 2 位于移动汽车上,两个移动终端分别连接 PC,在汽车上设置网络摄像头。
用户净速率测试 :外场测试环境中,采用点对多点 模式,空天车地移动通信系统浮空器中继终端(中心节 点,位于飞艇载荷吊舱)和移动通信终端 1(子节点)设 备分别连接 PC,PC 使用 Iperf 软件分别建立 Client 和 Server,测试子节点与中心节点用户净速率 2Mbps。
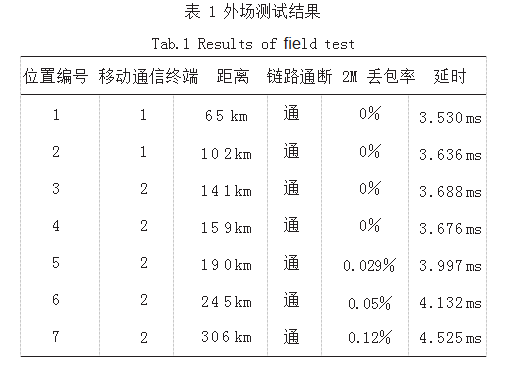
通信距离测试 :外场测试环境中,改变移动通信终 端设备与浮空器中继终端距离(使用经纬度坐标测算直 线距离),使用 Iperf 软件测试记录不同距离下无线链 路的通断情况、目标带宽(2Mbps 速率)下链路丢包 率和时延,并通过连接网络摄像头测试链路图像质量。
实测结果如表 1 所示。
5 总结
本文设计了一种面向轨道交通的空天车立体环境 下的移动通信系统,该系统利用临近空间静态滞空浮 空器平台作为中心基站,与列车、无人机等建立无线 信道,实现直径 300km 的覆盖范围,单用户可达速率 2Mbps。本文在分析系统主要技术要求的基础上,对网 络工作模式、链路损耗、传输速率、数据延时、组网方 式等重要技术参数进行了设计论证 ;将系统拆分为 6 个 子系统,并详细分析了系统关键工作流程,最后针对所 设计系统,进行了外场测试验证,测试结果表明,本文 所设计系统能够满足系统设计指标要求。未来,将在系 统工程化方面开展进一步工作。
参考文献
[1] 姜永富.我国铁路专用移动通信技术发展思路探讨[J].中国 铁路,2019(4):73-78.
[2] 谢和欢.基于5G技术的新一代列控通信系统研究[J].铁路通 信信号工程技术,2021(12):38-45.
[3] 王开锋,张琦,李辉,等.基于云计算的下一代铁路移动通信网 络架构[J].铁道标准设计,2019(2):161-165.
[4] 郑彩顺,张财元,刘武超,等.空地链路无线信道大尺度衰落模 型的研究[J].数字通信世界,2018(8):152-153.
[5] 张财元,刘冰炎,刘武超.探究多径衰落信道中的信道估计与 均衡技术[J].中国新通信,2018(18):6-7.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/63094.html