SCI论文(www.lunwensci.com)
摘 要:道路交通标志识别受限于所处复杂的自然场景以及种类繁多等因素,目前少有实时性、准确性、稳定性等各方面 均衡的识别系统。利用在工业中应用广泛的 YOLO 算法对交通标志进行识别, 以满足实时性和稳定性 ;利用大规模的自标数据 集对深度网络重新训练,提升其泛化能力,保证识别准确性 ;将训练完成的深度网络部署在嵌入式设备 Jetson TX2 上,利用 跨平台框架 Qt 实现交互式界面, 使系统具备可应用性。该系统是一个通用平台, 可支持不同高精度且高实时的网络模型的替 换使用。
关键词:智能交通系统,交通标志识别,深度网络,大规模数据集,嵌入式
Research and System Implementation of Real-time Traffic Sign Recognition Algorithm Based on YOLO Framework
JIN Xiaokang1. WU Yao2. SHI Yingjuan1. SHEN Caiyou1
(1.Jinhua Advanced Research Institute, Jinhua Zhejiang 321013;2.College of Information Engineering, Jinhua Polytechnic, Jinhua Zhejiang 321013)
【Abstract】: Restricted by complex natural scenes and the variety of traffic sign, there are few traffic sign recognition systems that are balanced and practical in terms of real-time, accuracy, adaptability, stability, etc. This paper exploits YOLO algorithm, which is widely used in industry, to recognize traffic signs to satisfy real-time and stability requirements. The deep network is re-trained by using a large-scale self-labeled traffic sign dataset to improve its generalization ability and ensure the recognition accuracy. The trained deep network is deployed on the embedded device Jetson TX2. and the cross-platform framework Qt is used to realize the interactive interface, so that the system is fully applicable. This system is a general-purpose platform that supports the replacement of different high-precision and high-real-time deep network models.
【Key words】: intelligent transportation system;traffic sign recognition;deep network;large-scale data set;embedded
0 引言
道路交通标志检测和识别是智能交通系统的研究热 点 [1], 是智能辅助驾驶系统的重要技术组成。交通标志 蕴含许多重要的交通信息,如道路状况变化、速度限 制、驾驶行为限制等。通过对交通标志的检测和识别, 可以有效指导驾驶员规范驾驶车辆,降低交通事故的发生率,还能有助于交通标志的日常维护,同时也是无人 车研究的关键和基础 [2]。因此,对交通标志识别的研究 具有极大的价值和意义。
深度学习是目前最受关注的方向之一,在语音 [3]、 图像 [4] 和自然语言处理 [5] 等领域取得了公认的成果。 但在实际项目应用中却遇到了较大困难,其原因是深度学习会耗费大量的计算及存储资源,导致它很难在边端 进行模型训练和推理。而智能交通系统通常部署在车载 移动设备环境下,要求实时处理能力强,在资源有限的 本地仍然能进行交通标志识别。
综合考虑了在移动设备上的系统需要有很高的稳 定性、适用性和实时性,选择轻量级 YOLOv3-Tiny 模 型 [6] 作为基础网络模型,并利用中国交通标志数据集 重新训练 [7], 达到拟合的效果。将训练好的模型部署到 NVIDIA TX2 移动平台上,最终实现基于 YOLOv3-Tiny 算法的实时交通标志识别系统。系统具有良好的交互式 界面,功能包括图像识别、视频识别、相机识别以及其 他车载功能,该系统支持主流的网络模型进行替换。
1 基于 YOLOv3-Tiny 的交通标志识别算法
YOLOv3 算法是工业界应用的最为广泛的目标检测 算法之一。而 Tiny 版本则是由 YOLOv3 网络框架精简 得到,精度不高但速度快。在真实场景中,更注重网络 模型的轻量化和实时处理性能 [8]。因此我们以 YOLOv3- Tiny 算法为基础网络,重新训练后构建一个高实时性、 高稳定性、高准确性的交通标志识别模型。
1.1 YOLOv3-Tiny 算法框架
YOLO 系列算法将目标检测任务作为回归问题来解 决,其思想是将整张图像作为网络的输入,通过网络结 构的前向推理,最终在网络的输出层得到目标的边界框 和所属的类别。
YOLOv3 算法构造了一个全新的网络结构来实现回 归的任务,引入了残差的思想来加深网络,旨在能够提 取到表达能力更强的深度特征,从而实现更高精度的分 类效果。YOLOv3-Tiny 算法是由 YOLOv3 算法精简得 到,大幅地减少了网络层数,仅保留了 2 个独立的预测 分支,使得它的推理速度加快了 3 倍多。
在 YOLOv3-Tiny 算法主干网络部分,包含 10 个卷 积层和 6 个池化层,主要用于特征提取。在 YOLOv3- Tiny 检测部分,分别利用 13×13 和 26×26 两种不同 尺度的特征图进行回归和分类,每个尺度上都有 3 个锚 框来预测目标的类别和尺度。锚框的大小主要是由真实值利用 K-means 算法聚类产生的。
鉴于中国交通标志的大小比一般目标更小,在处理 输入图像时,我们采取了更大的网格划分,使得包围框 能在更小的区域寻找到目标。
1.2 YOLOv3-Tiny 算法框架
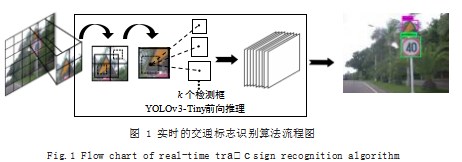
本文在 YOLOv3-Tiny 框架的基础上重新训练,用 以实现实时的交通标志识别,为部署到移动端奠定了算 法基础。算法的流程如图 1 所示。
网络的输入为一幅固定的图像, 划分成 S×S 的网 格,每个网格对应着 B 个检测框以及位置的置信度 C, 可以表示为 5 元组(x,y,w,h,C),其中 (x,y) 表示目标的 中心点坐标, w 和 h 对应长和宽。位置置信度 C 是由检 测框中包含目标的概率和准确度共同决定。在经过网络 的前向推理后,将会预测得到目标物体的位置信息及类 别概率 (x,y,w,h,C,classes),其中 classes 表示为分类的 类别概率。而网络的输出向量维度将由网络的划分来决 定,最终的输出向量为 S×S×[B×(4+1+classes)]。此外, YOLOv3-Tiny 网络采用二值交叉熵损失函数。
1.3 交通标志训练数据集
深度学习取得的成功归因于模型的质量、计算能力 的提高和大规模标记的数据。自从自动驾驶技术逐步发 展以来,模型的特征表示能力和 GPU 硬件的计算能力 都有了显著的提高。但交通标志数据集的发展却相对缓 慢,主要困难在于 :(1)交通标志随拍摄的时间图像差 异较大 ;(2)交通标志的形状比例随拍摄角度、距离影 响图像差异较大 ;(3)拍摄不稳定使得图像模糊 ;(4) 长时间的日晒雨淋使得交通标志污损及褪色等。
因此,我们采用的数据集是由团队成员在 2020 年 提出的中国交通标志数据集 CCSTDB[9],该数据集主要 由城市道路数据与高速道路数据两大类组成,细分为警 告标志、禁令标志和指示标志三类,一共包含了两万余 张标定的图像,主要来源于在真实场景下采集的图像, 利用纯手工标定形成。利用这样的大型交通标志数据 集,大大地提高了训练模型的鲁棒性和准确性,为系统 的准确识别提供了充足的数据基础。
2 系统设计
2.1 开发工具及环境
本系统基于 Darknet 的深度学习框架下,采用 Qt 和 C++ 混合实现,其中 C++ 用于模块化封装所有的功 能。Qt 是一款跨平台的图形用户界面编程程序框架, 我们用于开发交互界面,实现系统与用户的友好交互。
本系统采用机架式 GPU 服务器对 YOLOv3-Tiny 模型 进行重新训练。训练使用的 CPU 型号为 Intel Xeon E5 系 列,2.3GHz, 内存 32G,GPU 型号为 TITAN X, 且保证 恒温恒湿的环境。此外,由于需要在移动端进行数据处 理,将训练完成的模型进行部署移植。车载处理器是一块 高性能、低功耗的 NVIDIAJetsonTX2 实时人工智能性能 的嵌入式设备, 模型可以直接在板上边缘设备上完成图像 采集、智能处理整个计算的过程,极大节省了运行时间。
2.2 功能模块
本系统以 YOLOv3-Tiny 算法实现交通标志识别为 核心,其他功能模块为辅助,实现了界面美观,操作简 单的交互效果。整个系统分为 6 个模块,分别为图像 识别模块、视频识别模块、相机识别模块、视频播放模 块、交通标志大全介绍模块以及退出系统模块,每个模 块都各具功能,形成了功能完善,功能突出的系统。
(1)图像识别模块 :输入任意大小的图像,通过训练 完成的网络模型进行识别,通过 GPU 加速处理后,得到 对图像中交通标志的识别结果。网络自动将任意大小的图 像改变大小从而适应网络输入层, 通过模型前向推理的操 作,最后回归得到目标的所在位置和交通标志的类别信息 ;
(2)视频识别和相机识别模块 :视频识别模块是读取 本地视频文件进行识别,而相机识别模块是调用前端的摄 像头实时拍摄的视频进行识别,两者的流程相似。先将视 频以及前端相机中的 TS 格式的视频流进行解封装,得到 ES 格式的视频流,然后利用 GPU 对 ES 流进行硬件解码, 得到 YUV 格式的图像,最后调用深度网络对其进行识别 ;
(3)视频播放模块 :作为一个视频播放器为本地车 载视频提供播放的功能,具有快进、快退、暂停以及音 量加减等功能 ;
(4)标志大全模块 :是帮助驾驶者了解全国最新最 全的交通标志大全及含义、交警的手势大全和含义、交 通标志和交警手势图解等,用于扩大用户的交通知识面 ;
(5)退出系统模块 :是为了保证系统能够正确退 出,释放硬件资源,避免出现卡顿现象。
3 系统实现
本系统基于 YOLOv3-Tiny 算法,旨在实现一个稳 定的、实时的、准确的、可应用的交通标志识别系统, 界面利用 Qt 进行开发,如图 2 所示是系统的主界面。
进入功能界面后,下拉菜单提供不同的识别模块, 选择图像识别功能,打开对应的图像文件,系统显示识 别耗时、标志数量、标志类型以及位置信息,如图 3 所 示。单张图像需要解码、模型加载、前向推理以及结果 输出,因此处理一张图像约为 0.3s。
选择视频识别功能,打开对应的视频文件。读取视 频经过硬件解码后送入网络,识别后的结果如图 4 所 示,从中截取了其中一帧,识别到 2 个指示标志和 2 个 警告标志。本系统识别速度快,达到 65FPS。相机识别 效果与此相似,需调用相机获取视频。
选择视频播放功能时,可以选择本地视频进行播 放,支持播放快进、快退、暂停、提高音量等操作,如图 5 所示是该功能的初始界面。
4 结语
道路交通标志识别是智能交通系统中的重要组成部 分,需要保证整个系统的实时性、准确性、稳定性等各 个方面的均衡能力。选取 YOLOv3-Tiny 算法进行交通 标志识别,用于满足实时性和稳定性 ;利用大规模的交 通标志数据集对网络模型重新训练,使模型具备更好的 泛化能力,保证整个系统的准确性 ;此外,将训练完成 的模型部署在嵌入式设备 Jetson TX2 上,借助跨平台 框架 Qt 实现用户界面, 支持图像识别、视频识别、相 机识别的功能,还加入了多项辅助功能,使系统具备了 可应用性和适用性。本系统能够支持不同模型算法的替 代,且在今后的应用中还将针对高性能计算不断迭代优化。
参考文献
[1] 郭戈,许阳光,徐涛,等.网联共享车路协同智能交通系统综述[J].控制与决策,2019.34(11):2375-2389.
[2] 尉天成,陈小锋,殷元亮.基于多尺度卷积神经网络的道路交 通标志识别方法研究[J].西北工业大学学报,2021.39(4):891- 900.
[3] YANG X D,WANG W Z,YANG H W,et al.Simple Data Augmented Transformer End-to-end Tibetan Speech Recognition[C]//IEEE International Conference on Information Communication and Signal Processing,2020: 148-152.
[4] LU J,HE J X,LI Z,et al.A Survey of Target Detection Based on Deep Learning[J].Electronics Optics & Control, 2020.27(5):60-67.
[5] LE T H,CHEN H,BABAR M A.Deep Learning for Source Code Modeling and Generation:Models,Applications,and Challenges[J].ACM Computing Surveys,2020.53(3): 1-38.
[6] 李旭东,张建明,谢志鹏,等.基于三尺度嵌套残差结构的交 通标志快速检测算法[J].计算机研究与发展,2020.57(5):1022- 1036.
[7] ZHANG J,XIE Z,SUN J,et al.A Cascaded R-CNN with Multiscale Attention and Imbalanced Samples for Traffic Sign Detection[J].IEEE Access,2020(8):29742-29754.
[8] ZHANGJ,WANGW,LU C,et al.Lightweight Deep Network for Traffic Sign Classification[J].Annals of Telecommunications, 2020.75(7):369-379.
[9] 李旭东.基于深度卷积网络的实时交通标志检测研究[D].长 沙:长沙理工大学,2020.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/54637.html