SCI论文(www.lunwensci.com)
摘 要 :随着老龄化程度加深以及摔倒骨折和脑卒中等原因导致的下肢功能障碍者越来越多,对下肢康复轮椅的研究也越 来越广泛,但目前对下肢康复轮椅测试平台的研究仍较少。本文设计了一种下肢康复轮椅测试平台控制系统,以 STM32F103 系列单片机为控制核心,采用模块化设计思想,对通讯模块、电机驱动模块、传感器信号采集模块等进行软硬件设计,采用传 感器技术实时控制假人模拟患者基于多姿态轮椅进行康复训练过程中的角度和压力,验证了该控制系统的可靠性。
关键词:下肢康复轮椅,测试平台,控制系统,模块化设计
Research on Control System of Lower Limb Rehabilitation Wheelchair Test Platform Based on STM32
YU Xueqin1.2.3. YU Hongliu1.2.3. WANG Duojin1.2.3
(1.University of Shanghai for Science and Technology, School of Health Science and Engineering, Shanghai 200093; 2.Shanghai Engineering Research Center of Assistive Devices, Shanghai 200093;3.Key Laboratory of Neural- functional Information and Rehabilitation Engineering of the Ministry of Civil Affairs, Shanghai 200093)
【Abstract】: The study on lower limb rehabilitation wheelchairs is becoming more and more extensive along with the aging process and the rise in lower limb dysfunction brought on by fractures, falls, and strokes, but the research on lower limb rehabilitation wheelchair test platforms is now much less. This study designs a control system for a wheelchair test platform for lower limb rehabilitation . It uses an STM32F103 series single chip microcomputer as the control core, adopts a modular design approach, and develops the software and hardware for communication modules, motor drive modules, sensor signal acquisition modules, etc. During the rehabilitation training based on the multi posture wheelchair, the angle and pressure of the dummy are controlled in real time using sensor technology, demonstrating the dependability of the control system.
【Key words】: chair for lower limb rehabilitation;test platform;control scheme;modular design
0 引言
根据第七次人口普查资料显示, 2020 年我国 60 岁 及以上老年人口数量增至 2.64 亿人,人口老龄化水平升 至 18.70%,人口老龄化即将迎来新浪潮 [1]。大部分老年 人随着年龄的增长,身体机能的老化,存在不同程度的下 肢功能障碍。此外,由于摔倒骨折、意外事故和脑卒中等原因导致的下肢功能障碍患者越来越多 [2]。医学理论和临 床医学证明,除了手术治疗和药物治疗外,科学的康复训 练对下肢功能障碍恢复具有显著治疗效果 [3]。作为一种较 为常见的移动出行工具,轮椅不仅要实现最基本的代步功 能,更应当开发其康复训练的辅助医疗功能 [4],使下肢功 能障碍患者得到有针对性的康复训练, 帮助患者更好的恢复行走能力。为规定轮椅车进入市场前需要测试的项目和 指标, 我国出台了如 GB/ T 18029.8 的国家标准 [5], 而国 内对基于下肢康复训练轮椅的安全测试平台的研究很少。 基于此, 本文采用测试假人模拟患者基于多姿态轮椅进行 康复训练,验证本测试平台控制系统的有效性。
1 下肢康复轮椅测试平台总体控制方案
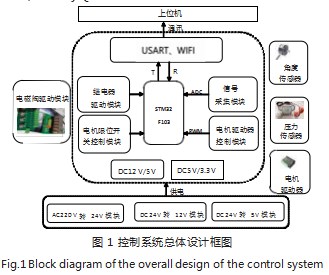
本测试平台主要由测试假人和支撑框架组成,测试 假人作为测试平台主体以模拟使用者人体与下肢康复训 练轮椅直接接触,接受被测轮椅下肢训练及平衡训练 等。本文基于 STM32F103 单片机,针对下肢康复轮椅 测试平台,设计了假人模拟下肢功能障碍者进行康复训 练的控制系统,总体设计方案如图 1 所示。本控制系 统硬件部分采用模块化设计,不仅方便软件的修改与调 整,而且更易于修改、维护与升级。硬件部分主要包括 传感器信号采集模块、通讯模块、电机驱动模块、气动 控制模块和供电模块; 软件设计上移植了 μCOSIII 实 时操作系统,增强了系统控制的实时性和稳定可靠性。 另外,运用 PyQt5 进行了上位机界面设计。
2 系统硬件设计
总体硬件系统主要包括通讯模块、供电模块、电机 驱动模块、传感器信号采集模块和气动控制模块。系统 采用 STM32F103C8T6 作为主控芯片, 该单片机体积 小,引脚数量充裕,市场认可度很高,是目前在产品开 发中最常用的控制芯片之一。
2.1 通讯模块
本设计通讯模块采用了 ESP32 芯片,通过通讯模 块对采集模块所采集到的数据进行缓存,在与上位机保 持连接的同时,通过 Wi-Fi 网络将所采集到的数据发送 给 PC 上位机,上位机则对数据进行存储及实时显示。
2.2 供电模块
电源电路设计主要考虑功能性和安全性,气泵驱动需要 220V 电压,而电机驱动、信号采集等模块通过开 关电源 LRS-350V-24V, 将 220V 电压转为 24V 进行供 电,开关电源转换效率高达 90% 以上,可长时间稳定 工作。此外,还使用了降压模块把 24V 电压降为 5V 给 单片机供电,最后基于 AMS1117 芯片将 5V 降为 3.3V 给单片机和 Wi-Fi 通讯等电路供电。
2.3 电机驱动模块
本测试平台使用的是 86BYGH2100 两相步进电机, 其步距角较小为 1.8°,能有效提高电机的控制精度、提 高电机的输出转矩,并能有效地消除电机的低频振荡现 象 [6]。步进电机安装在测试假人躯干中心位置,以模拟 患者基于多姿态轮椅进行平衡训练时重心的移动,电机 控制假人髋、膝关节在冠状面左右摆动,摆角控制在 20°安全范围内,改变假人重心以产生脚踏上的压力差, 验证康复轮椅平衡训练的安全性。电机驱动器选择的是 DMA860H 数字式两相步进驱动器,驱动器内部集成了 参数自动整定功能,能够针对不同电机自动生成最优运 行参数,最大限度发挥电机的性能 [7]。此外,还需要用 到 ULN2003 芯片,该芯片工作电压高,工作电流大, 灌电流可达 500mA,并且能够在关态时承受 50V 的电 压,输出还可以在高负载电流并行运行 [8]。本文设计的 驱动电路根据脉冲信号进行工作,脉冲信号由 MCU 的 I/O 口输出,经驱动芯片 ULN2003 来驱动步进电机。
2.4 传感器信号采集模块
本控制系统主要采用了磁敏角度传感器膜盒式称重 传感器,假人左右髋、膝关节处各安装了角度传感器,用 于实时采集角度值,左右足底安装了压力传感器,通过信 号放大电路对信号进行 A/D 转换处理,便于主控板读取, 并调整信号至合适的数值, 再由主控板决定对假人在当前 状态下提供多大的倾斜角度,验证平衡训练的安全性。
2.5 气动控制模块
气动控制模块通过气动电磁阀控制安装在假人膝关 节上方气动刹车钳的抱闸和放松,模仿人体的痉挛和放 松状态。电磁阀的工作原理就是利用给电磁铁通电,电 磁阀里面的铁芯运动,来控制流体的通断。主要由继电 器控制,电磁阀可以配合不同的电路来实现预期的控 制,而控制的精度和灵活性都能够保证 [9]。本系统选用 的是一进一出电磁阀,标准电压 DC24V 通过欧姆龙继 电器组进行开关的控制。此外,为了防止突发状况发生, 设计了手控开关,可使下肢康复轮椅测试平台在任何情 况下,都能立即停止动作,防止患者受伤或损失扩大。
3 系统软件设计
系统软件设计是实现下肢康复轮椅测试平台安全性 测试的基本条件,也是实现良好人机交互的关键。软件设计不仅要保证假人训练过程中的角度、压力等参数在 安全范围之内,而且要实时可控、操作简单,能满足测 试康复轮椅各种训练功能需求。
3.1 系统控制程序设计
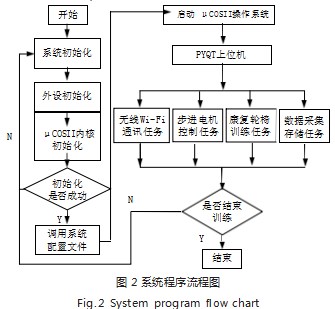
首先初始化系统硬件和 μCOSIII 操作系统内核, 若初始化成功则调用系统配置文件,设置系统任务,否 则返回初始化设置。在 μCOSIII 操作系统中通过设置 任务优先级大小来进行抢占式任务管理,在设计程序时 给每一个任务赋予一定的优先级并分配一定的堆栈。本 系统设置的优先级从高到低为:Wi-Fi 通讯任务,步进 电机控制任务,康复轮椅训练任务,数据采集存储任 务,如图 2 所示为系统程序流程图,实现了 μCOSIII 操作系统移植,使代码可读性更高。
3.2 上位机设计
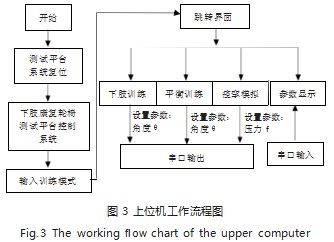
本文上位机设计采用 Python 为编程语言,通过无线 Wi-Fi 与上位机 PC 进行连接通讯, 通过 PyQt5 平台实现 用户交互界面的设计与开发。PyQt5 使用 Qt Designer 对 界面进行排版, 可节省大量开发时间 [10]。上位机工作 流程如图 3 所示,该上位机分为主界面和子界面,主界 面为模式选择界面,子界面包括下肢训练界面、平衡训 练界面和痉挛模拟界面。
该上位机首先需要进行测试平台系统复位, 在确认康 复轮椅训练指标参数准确无误后, 选择假人模拟患者训练 模式,不同训练模式对应不同的参考指标及范围。传感器 信息采集模块将检测到的数据实时传输给上位机,并在训 练结束后生成相应的参数报告, 方便后期对轮椅训练功能 进行评估。在整个康复训练过程中,通过 PyQt5 平台能 够更加直观地监测到假人训练情况,在一定程度上为相 关康复训练设备的安全性测试方法提供了新的途径。
4 实验与结果分析
测试平台控制系统搭建完成后,对测试平台系统进 行了功能性测试。测试平台控制系统样机如图 4 所示。 在实验过程中,上位机发送指令,控制假人模拟患者基 于多姿态轮椅进行下肢训练、平衡训练和痉挛模拟。进 行下肢被动训练时,由角度传感器测得大小腿构件间、 以及大腿机构与躯干机构间的相对角度位移,并通过换 算得到髋、膝关节运动角速度、角加速度等数据,与理 论值拟合度很高。进行平衡训练时,通过步进电机改变 假人重心以产生轮椅脚踏上的压力差,使髋膝关节在冠 状面左右摆动,摆动范围控制在 20 度以内,处于轮椅 倾覆的安全范围内,验证了平衡训练的安全性。为验证 痉挛模拟有效性,采用气动刹车钳作为制动部件, 利用 轮椅上推杆电机的力反馈传感器,监测到假人在下肢训 练时反馈力陡然增大,从而判断假人能模拟痉挛症状并 触发痉挛保护机制。基于以上分析,验证了该控制系统 能够安全可靠地模拟患者基于康复轮椅进行训练。
5 结语
本文提出了一种基于 STM32 的下肢康复训练轮椅测试平台控制系统,对硬件系统的通讯模块、供电模 块、电机驱动模块、传感器信号采集模块和气动控制模 块分开设计,方便修改与系统维护。软件设计上移植了 μCOSIII 实时操作系统,使控制系统灵活性和可靠性更 好。此外,基于 PyQt5 平台进行了上位机界面设计,采 用 ESP32 模块实现了无线 Wi-Fi 与上位机的通讯, 并将 采集的各个部位运动数据发送到上位 PC 中,通过实验 结果分析,验证了该测试平台控制系统的可靠性。本文 将下肢康复训练测试平台与康复训练轮椅结合设计,具 有一定的创新性,但该类设备应向轻巧化、人性化、多 功能化的方向发展,使其既适用于医疗机构又适用于家 庭,这也是下肢康复训练机器人未来的研究方向之一。
参考文献
[1] 韦艳,段重利,梅丽,等.从第七次人口普查数据看新时代中国 人口发展[J].西安财经大学学报,2021.34(5):107-121.
[2] 张建云.步行康复训练机器人及步态评价方法研究[D].南京: 南京理工大学,2016.
[3] 姜莹,郭小萍,赵娟平 .一种全方位移动型下肢康复训练机器 人的研制[C]//第十一届沈阳科学学术年会暨中国汽车产业集 聚区发展与合作论坛论文集(信息科学与工程技术分册).,2014: 470-473.
[4] 赵新宇.柔性助力式下肢肌力康复训练轮椅设计[D].秦皇岛: 燕山大学,2020.
[5] 单新颖,闫和平,谷慧茹.中国轮椅车标准和质量状况分析[J]. 中国康复理论与实践,2014.20(12):1194-1195.
[6] 曾琪 .基于THB6064H两相步进电机驱动控制器的设计[J]. 中国科技信息,2016(23):52-54.
[7] 王蕾,魏曾,李学辉. 电解加工微孔实验装置的研制[J]. 电加工 与模具,2018(1):30-32+40.
[8] 凌广,唐林杰 .基于非对称采样SPWM的步进电机控制器设 计[J].机电工程技术,2022.51(3):197-201.
[9] 王近,刘开.基于ATmega128的智能小鼠训练系统的设计[J]. 电子世界,2013(6):131-134.
[10] 邓露露,喻洪流,严泽宇,等 .腰椎牵引治疗装置控制系统设 计[J].软件导刊,2020.19(3):159-162.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/54610.html