SCI论文(www.lunwensci.com)
摘 要:增强现实平视显示器,或称 AR-HUD 技术,正逐渐与电子辅助系统集成,使驾驶者无需低头或转头即可看到车 速、导航等重要驾驶信息,为驾驶员提供更安全、更有效的驾驶体验,打造新一代智能驾驶技术。与此同时,基于 AR-HUD 的车载增强现实导航技术已成为汽车智能技术领域的研究热点。然而,为了实现工业应用,还有许多关键技术问题需要讨论和 解决。由此, 本文对进行以下讨论和分析, 基于 AR-HUD 系统和汽车外部环境良好的互动特性, 改善目前自主驾车系统切换 模式的一个新方法。
关键词:AR-HUD,车载导航,智能驾驶
Research on the Practicability of Vehicle Navigation Technology Based on AR-HUD
FU Xinyao, JU Wenhang, CHEN Rui, ZHANG Jingxuan, ZHANG Miao
(Zhuhai College of Science and Technology, Zhuhai Guangdong 519041)
【Abstract】: Augmented reality head-up display, or AR-HUD technology, is gradually trying to integrate with the electronic assist bicycle system, enabling drivers to see speed, navigation and other important driving information without lowering their heads or turning their heads, providing safer and more effective driving experience for drivers and creating a new generation of intelligent driving technology. At the same time, vehicle-mounted augmented reality navigation technology based on AR-HUD has become a research hotspot in the field of automotive intelligent technology. However, many key technical issues need to be discussed and solved in order to achieve industrial application. Therefore, this paper discusses and analyzes a new method to improve the current autonomous driving system switching mode based on the good interaction characteristics ofAR-HUD system and vehicle external environment.
【Key words】: AR-HUD;vehicle navigation;intelligent driving
1 综述
智能驾驶技术已经进入人们的日常生活,它的到来 将彻底改变未来人们的出行方式,高度智能的技术无疑 将为社会创造巨大的经济效益。然而,我国目前正处于 高度发展时期,在科学技术关系方面需要进一步探索。 考虑到目前的技术发展状况和未来的技术路径,在未来 几年,自动驾驶系统可能不会直接取代辅助驾驶系统, 但过渡将更加渐进。然而,科学技术的发展并不一定是 一个矛盾的迭代,科技的融合和优化给未来的驱动方式 带来了许多机遇。增强现实平视显示技术, 也称为 AR- HUD 技术,正在逐步尝试与电子辅助自行车系统集成 [1]。AR-HUD 具有更广阔的视野,为驾驶员带来更安全、 更高效的驾驶体验。同时,在系统与车辆外部环境良好 交互的基础上,还可以改进目前自动驾驶系统切换模式 的方法。根据上面的推测,本文通过对智能汽车及相关 技术研究的现状的调查,和 AR-HUD 导航投影系统显 示过程原理和关键因素进行了研究,同时参考人机交互 界面相关理论和行业标准, 试图对 AR-HUD 的痛点进 行处理和制作 AR-HUD 车载导航向导。
2 AR-HUD 发展趋势调查
2.1 HUD 导航技术革新
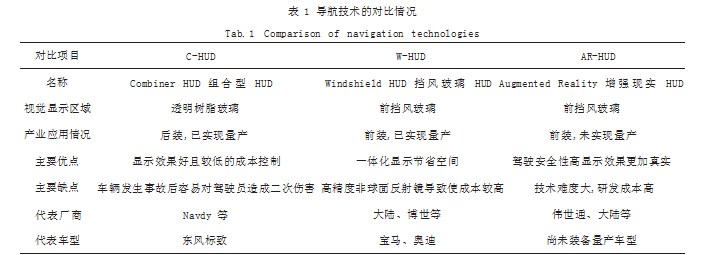
HUD 车辆导航技术的发展完成了从 C-HUD、W-HUD到 AR-HUD 的技术改造。目前, HUD 大致包括三类 : C-HUD(Combiner HUD)、W-HUD (Windshield HUD)、 AR-HUD(Augmented Reality HUD)。(1) C-HUD, 通 过在仪表板上安装 0.5 透明有机玻璃来实现成像 ;(2) AR-HUD 有机玻璃为防止投影信息反光到玻璃两侧所 以进行了特定处理 ;(3) W-HUD 则是把光源投影在前 风挡上,在驾驶者目视前方时产生的虚拟图像。驾驶员 可以不转移目光的情况下获得道路信息,解决了以往因 转换实现造成的交通隐患。三类导航技术的对比情况如 表 1 所示。
目前 AR-HUD 的虚拟成像已经可以和实景相结合, 并实施更新路况信息,由于信息能更加直观获取,驾驶 的安全性也得到进一步提升。此外,增强现实技术的介 入,使驾驶体验感大幅提升。在不久的将来,与 ADAS 高度结合也是主要的发展趋势。
2.2 增强现实导航技术研究现状
在早期,增强现实 (AR) 一词没有明确定义,不同 的研究者对它的定义也不同,并且随着研究的进展,定 义也在不断变化。1994 年,Milgram 等 [2] 人将 AR 定 义为两个不同的概念 :广义上的增强现实和狭义上的增 强现实。在广义的增强现实中, AR 是指“用虚拟标记 增强自然场景,并反馈给用户”,而在狭义的增强现实 中, AR 是指“用户通过透明的头戴式显示器清晰地看 到现实的一种形式”。
增强现实技术是一种将虚拟物体“放进”现实世界 的技术。通过计算机以及大数据的赋能,可以将真实的 图像数据与计算机自动生成的虚拟图像数据进行拟合优 化,从而实现了真实世界与虚拟世界的无缝连接。在未 来, AR 将会是现实世界和虚拟世界进行融合的桥梁, 这样可以使用户感觉到真实对象和虚拟对象共处于同一 空间。Azuma[3] 将 AR 定义为一个“结合了真实和虚拟信息,实时交互,并存在与三维空间中”的系统。AR- HUD 赋能于车载导航的结合,司机们不会被转移到单 一的设备上寻找信息,从而缩短了反应时间,减少意外 发送的可能性。增强现实导航系统是将增强现实技术应 用于导航的系统。本质上,该系统将虚拟导航信息与现 实世界中的对象结合在一起。该系统可应用于多种场 景,如车辆导航、行人导航等。在日常使用场景中,通 过向现实世界添加导航信息来帮助用户更有效、更安 全、更便捷地到达目的地。
3 HUD 三大技术路线
现阶段 AR-HUD 的技术路线有三种,从逐渐以后 安装为主的 C-HUD,到目前直接投射到前挡风玻璃上 的 W-HUD[4]。虽然 HUD 仍是少数,但其全面推广是必 然的。用户使用 HUD 看重的是驾驶时的三个要素 :安全 性、交互便利性以及智能化。以上三个要素是推动 HUD 全面普及的重要需求。
3.1 痛点 1
驾驶员通常在行车途中需要多次低头看向仪表盘,在 低头看向仪表盘时会分散和干扰驾驶员的注意力,导致车祸 发生的可能性大大提升。通过安装了 HUD 后,驾驶员就可 以只需将目光向下 5 ~ 10 度即可查看到完整的车辆信息。
3.2 痛点 2
人机交互与远程信息技术存在瓶颈,远程信息技术的复 杂性影响驾驶员的注意力。HUD 简化了交互 :HUD 克服 了现有远程信息技术人机交互要求的潜在瓶颈,在 HUD 接口中简洁地呈现车辆状态信息。此外,通过附近两个 表面的长投影同时提供不同的信息,各种类型的屏幕界 面高效直观,并且驾驶员可以处理多种路况和意外情况, 并且车辆的前部和侧面提高了驾驶的舒适性和安全性。
3.3 痛点 3
市面上大多数的车载导航界面有很多导航方向不准、导航信息更新不及时等局限性。HUD 推动智能驾驶 : AR-HUD 会和自动车辆辅助行驶系统相融合,使用新 型增强投影,通过数字显微镜先生成需要的图像元素 后,利用反光镜将生成的图像元素投射在前挡风玻璃上。
4 HUD 发展趋势
W-HUD 仍有缺陷 :传统 HUD 的视角(FOV) 窄, VID(投影距离)近,且投影信息相对较少。AR-HUD 性能相对优越,拥有超过 7.5m 的 VID。它的宽视角兼顾 了安全性和抗疲劳性。AR-HUD 具有感知和实时集成道 路场景的功能,适用于添加 ADAS 信息和高级导航信息。
4.1 核心难点
(1) AR-HUD 增加了多感知、识别和融合三个环节, 融合算法是核心难点 ;(2) AR-HUD 要保持各项性能都 是最佳的话就要扩大容量, 典型 AR-HUD 体积 8 ~ 15L ; (3)AR-HUD 的广角带来了阳光负载的挑战。
4.2 解决方案
(1) DLP 投影技术的运用 :DLP 投影技术有更高 的亮度和对比度,可以支持二极管激光的光源的,主要 的可靠性、节能,以及适应温度已达到汽车指标水平, 以支持各种各样的光波和 HOE 指南。(2)额外使用光 波波导和 HOE( 全息膜技术 ) 不仅可以减小 ARHUD 的 尺寸,还可以增加 FOV。
4.3 问题分析
通过现有研究驾驶帆船时, 选择使用手机安全,这 也带来了两个问题 :(1)传统手机导航,需要驾驶员转 变注意力,长时间的手机导航与路面的注意力切换,容 易产生疲劳,影响驾驶安全 [5]。(2)传统的移动导航地 图显示的方向和焦距与驾驶视野不一致。由于导航地图 的可视化,驾驶员经常会失去驾驶视野,导致驾驶员分 心,对自己和他人造成危险。
5 AR-HUD 相关技术基础
5.1 HUD 光学原理
HUD 的光学基本原理, 类似于幻灯片投影。投影 仪发出的声学和光学信息首先反射到“投影镜”上,然 后通过“投影镜”反射到“挡风玻璃”上。人眼看到的 实际上是一个虚拟的图形,在眼睛前面 1 ~ 2m,给人 的印象是视觉信息悬浮在前面的道路上 [6]。
HUD 图像在前挡风玻璃上是可定向的。关键是 “投影镜”。HUD 图像的方向可以通过改变“投影镜” 的角度来调整。挡风玻璃通常是弯曲的,但是,如果将 图像直接投影到弯曲的玻璃表面上,则会导致图像变 形。这需要改进,因此将“投影镜”和“镜子”重新设 计成弧形。
运用光反射原理, HUD 能够在挡风玻璃上呈现超速 告警、车况检测、油耗、每小时车速和防止追尾等信号, 让驾驶者专心于前方路面,实现自动驾驶安全。它将驾驶 信号与驾驶员的视野平行映射, 避免了前方道路对仪表的 干扰,从而减少了由于眼睛不断调整焦点而产生的延迟和 不适感。高度与人眼的高视觉距离相同,因此可以从挡风 玻璃的中心和下面获得图像。虚拟图像和真实路面融合 得很好,它通常可以设计到汽车引擎盖前 1 ~ 2m。
5.2 STM32 单片机车辆平视显示系统设计原理
采用了一个基于 STM32 的车辆平视温度显示监测 系统的硬件设计方案。该检测系统硬件主要构成分为电 源电路、数据信息采集控制模块、信息处理单元和图像 信息源采集控制处理模块、图像数据源显示模块、光学 投影模块,由连接整个监测系统硬件的专用电源电路负 责供电,温度传感器模块用于显示检测汽车水箱周围的 实际温度信息, LCD 投影屏幕主要用于滚动显示由车 载温度传感器所检测到汽车的温度值。光强信息是由光敏 传感器进行检测,并且能够通过检测的光强值信息来进行 调节显示器背光显示的亮度,然后进行调节整个 LCD 所 显示出图像的背景亮度,使得整个 LCD 才能显示比较 清晰亮度的背景图像。
准直透镜可用于直接对背光源中发射白光的光源透 镜进行光学校准, 从而达到使被投射照在整个 LCD 的 屏幕区域上得到的色光变得更加清晰均匀。反射器主要 用于驾驶员接收显示 LCD 屏幕内容上显示的图像信息, 图像将被自动反射送到光学合成器,然后再次反射成像 到驾驶员自己的眼睛,驾驶员将可以随时通过光学合成 器通过查看的 LCD 显示屏幕直接查看反射到液晶屏画 面上显示出的内容信息。
以高性能的 STM32 单片机控制器为主控,设计与 研发制造了一套基于相应单片机标准芯片的智能汽车平 视温度自动显示温度采集控制器系统,包括主控温度显 示控制电路、背光电路、图像数据采集源路和驱动及输 出接口电路、电源电路,通过单片机和 DS18B20 单片 机自动采集到汽车水杯温度,模拟车载温度传感器可以 直接自动采集温度到实际汽车水箱温度,并同时可以自 动将传感器收集分析后所得到的汽车温度信息自动进行 显示后存储记录在车载液晶 LCD 显示器屏幕上。图像 源中温度的测量信息将被自动传输到红外反射器,然后 又被自动反射返回到热合成器,可以同时通过红外合成 器和观察图像源显示器上实时显示出来温度信息。温度 传感器能够和水温计一样同时插入一只装有各种不同温 度水计的玻璃杯子中,以直接测量出水温,从而能够验证在 HUD 监视器上直接显示到的真实温度值显示的准 确性。同时,光敏传感器被用于通过检测不同区域的光 强度信号以有效改变图像源显示器的光源亮度,以便帮 助驾驶员们在各个不同亮度的暗光环境情况下能清晰稳 定地连续查看 HUD 仪表上实时显示到的汽车水箱温度 信息。测试的结果表明,合成器屏幕上所显示出来的水 温信息更稳定且可靠。
5.3 AR-HUD 系统成像模型
AR-HUD 系统成像模型虚像不是由实际光线汇聚 的,而是在大脑的经验作用下,由实际光线的反向延长 线汇聚而成的像。虚像之所以能被眼睛看见,是因为光 线通过晶状体后,会聚在视网膜上,形成真实的影像 [7]。 W-HUD 源图像上的一点发射出一些光束,这些光束具 有一定的发散角 a。这些光束在 W-HUD 内部的镜片组 反射后,通过汽车前挡风第二次反射玻璃,最终走进人 类的眼睛与一个角度的偏差。由于人脑只认为光是沿直 线传播的,因此它认为物体在交点的反向区域 ( 即虚拟 镜像的点 ) 射出光,当 W-HUD 源图像中的所有像素都 发出山射线时,这些射线在人眼中经过一系列反射后, 在汽车前部形成许多虚拟图像点。虚拟图像点是对齐 的,让人感觉就像汽车前面有一个屏幕,这个虚拟屏幕 是 W-HUD 形成的虚拟图像。
对比与传统的 W-HUD, AR-HUD 具备了对现实进 行视觉增强的能力,如图 1 所示,空间有一物体 P,当 人眼从 E 位置通过车前挡风玻璃看 P 时, AR-HUD 通 过将虚拟的生成标记信息显示在虚像平面的 H 处,此 时从 E 位置看去人就会感觉到物体 P 上叠加了一些信 息,随着人眼移动到 E2 处,虚像平面上叠加的标记也 移动到 H2 处,像这样实时地、动态地根据人眼的位置 与物体的位置不断地改变虚拟叠加标记在虚像平面上的 位置,使之被人看上去永远都是和现实中的物体是对齐 一致的,这个过程就完成了 AR-HUD 对视觉的增强, 体现了 AR-HUD 比普通 HUD 更加先进的一个方面。
5.4 基于 GPS 数据的 AR-HUD 导航系统
利用 GPS 数据的 AR-HUD 导航系统,其主要采用以下步骤进行 GPS 数据导航 :
步骤(1),将 GPS 提供的路径规划离散点的火星坐 标,转换为三维立体场景中的坐标点,称之为路径点。
步骤(2), 对路径点做筛选, 删除一些过密的点, 留下有效的路径点,过密的判断条件是一个自由定义的 距离参数。
步骤(3),根据 GPS 给出的每个路径点的位置以 及其前后两个相邻的路径点进行平滑处理从而将折线段 变为平滑的曲线段,并且根据转向角大小划分出不同的 路径节点类型 :直行节点、转弯节点、掉头节点。
步骤(4),将路径点拟合为多个曲线段后,将多个 曲线段连接形成路径规划曲线。
步骤(5),当接收到 GPS 定位数据时,将 GPS 提 供的实时定位的火星坐标转换为三维立体场景中的坐标点, 并将其映射到路径规划曲线上,得出车辆的当前位置。
步骤(6),在 GPS 更新间隔内,根据前一次的 GPS 定位数据与实时的车速信息,计算获得每一时刻的 GPS 车辆位置。
步骤(7), 根据实时的车速信息预测出每一时刻的 车辆位置。
步骤(8),结合卡尔曼滤波与高斯分布算法,对车 辆位置做加权,获得最优车辆位置。
步骤(9),每当获取新的 GPS 定位数据时,将步 骤(8)、步骤(5)取得的位置数据作比较,当差异超过 阈值,则重置步骤(8)取得的最优车辆位置数据, 使其 等于步骤(5)取得的位置数据。
步骤(10),将步骤(5)获得的位置数据映射到路 径规划曲线上。
步骤(11),判定当前车辆所处位置的路径种类, 以及至下一个关键节点的距离,包括 :根据当前车辆映 射到规划路径上的位置,以及该位置至下一个关键节点 的距离,判断当前车辆是否处于直行阶段、直行待转阶 段还是正在转弯阶段或掉头 ;若该车辆的位置距离下一 个关键节点的距离大于设定阈值则认为车辆处于直行阶 段 ;若小于设定阈值则认为车辆进入直行待转阶段,车 辆即将转弯或者掉头 ;若车辆已经处于关键节点前后一 指定距离内,则车辆处于转弯或掉头过程中。
步骤(12),生成与步骤(11)对应的实时 AR 导 航动画输出显示。
6 研究结果
车载 HUD 融合实景导航显示方法,其特征包括几个方面 :(1)通过收集路面图片信息,获取实际路面识 别模型 ;(2)获取导航信息, 依据当前 GPS 定位信息判断当前车辆是否接近特定地点 ;(3)若导航信息显示 车辆已接近特定地点,则利用安装在 HUD 底座前的前 置摄像头检测实际路况信息,通过获取的实际路况信息 引用所述实际路面识别模型进行识别,判断确认车辆是 否到达特定地点 ;(4)若车辆确定到达特定地点,则利 用安装在 HUD 底座后的后置摄像头确定驾驶员的视觉 位置,及实际路况中道路显示标识点位置信息、车辆前 挡风玻璃位置信息,计算出 HUD 道路箭头标识的显示 区域信息,将实际路况通过 HUD 投屏到车辆前挡风玻 璃的显示区域。
AR-HUD 的核心是实景导航的 AR 功能,其车辆 行驶信息、道路信息、导航指引等内容可以与显示道路 相结合,在显示便利性、行车安全性等方面有着明显提 升,驾驶员能将注意力集中到道路行驶上,提升行车安 全性。但由于目前此技术的研发周期长,技术应用尚不 完善,所以还处在技术积累期,尚未在市场中形成爆发 增长,但在可期的未来,此技术的各种难点一一解决后 或将迎来汽车显示领域的革命性改变。
参考文献
[1] 张艺凡.基于AR-HUD的人机界面交互设计及实验测试[J]. 科学技术创新,2021(35):60-63.
[2] MILGRAM P,TAKEMURA H,UTSUMI A,et al.Augmented Reality a Class of Displays on the Reality-virtuality Continuum [J].Telemanipulator and Telepresence Technologies,1994 (2351):282-292.
[3] AZUMA R.A Survey of Augmented Reality,Presence[J]. Teleoperators and Virtual Environments,1997(6):355-385.
[4] 杨茂华.浅谈HUD(抬头&平视显示)整车布置设计思路及系 统解决方案[J].时代汽车,2021(10):103-104.
[5] 徐瀚祺,宫承波.交通场景的沉浸式传播探究 — 以AR- HUD和透明OLED屏幕等透明显示设备技术的应用为例[J].新 闻爱好者,2021(08):37-41.
[6] 罗啟飞.基于车载AR-HUD的增强现实导航技术研究[D].重 庆:重庆邮电大学,2020.
[7] 李卓,周晓,郑杨硕.基于AR-HUD的汽车驾驶辅助系统设 计研究[J].武汉理工大学学报(交通科学与工程版),2017.41(6): 924-928.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/52842.html