SCI论文(www.lunwensci.com)
摘要:CBTC系统是目前城市轨道交通的主流信号系统,在全国各大城市均有运用,其中,信号机又是信号系统重要的轨旁设备。但是,由于线路土建的原因,信号机可能存在被其他轨旁设备或建筑物遮挡的情况,而复示信号机的设置将有效解决这个问题。本文主要对轨道交通信号系统项目增设复示信号机位置及相关场景进行分析,得出合理的复示信号机设置位置及相关运营限制。
关键词:信号系统;复示信号机;场景分析
CBTC repeat signal setting scenario
Wang Yongxing
(CASCO Signal Co.,Ltd.,Shanghai,200072)
Abstract:CBTC system is the mainstream signal system of urban rail transit,which is used in major cities across the country,of which the signal machine is an important trackside equipment of the signal system.However,due to the civil construction of the line,the signal machine may be blocked by other railside equipment or buildings,and the setting of the re-display signal machine will effectively solve this problem.This paper mainly analyzes the location and related scenarios of the additional re-display signal machine in the signal system project of the rail transit project,and draws a reasonable re-indication signal machine setting position and related operation restrictions.
Key word:signaling system;repeat signal;scenario analysis
随着我国城市轨道交通的发展,土建结构的复杂和多变导致信号机出现可视距离不足的情况越来越多。本文主要针对项目存在的信号机可视距离不足问题,以及增设复示信号机后对CBTC系统下列车行驶的场景进行相关分析,提出信号机和复示信号机之间的设计距离建议,同时考虑可能存在的危险场景,供其他项目参考。
一、CBTC系统简述
项目采用行业主流的CBTC系统作为信号防护系统,CBTC是基于通信的列车控制系统。在CBTC模式下,列车以车载信号为主体信号,以轨旁信号为辅,根据信号系统计算的列车授权终点(允许行驶的最远距离)自动或手动运行。非CBTC模式下的列车以轨旁信号为主体信号,驾驶员严格按照信号机显示行车。进路内方只允许一列车行驶[1-2]。
二、复示信号机
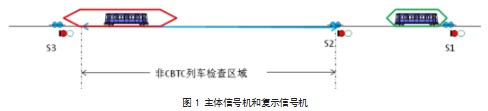
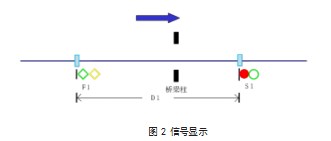
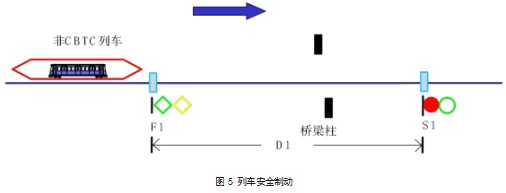
项目实施过程中发现,信号机S1会被其前方的桥梁柱等障碍物遮挡,导致可视距离不足。《铁路技术管理规范》第56条规定,在地形、地物影响视线的地方,进站、通过、预告、遮断信号机的显示距离在最坏的条件下不得少于200米。因此,项目在信号机S1前增设复示信号机F1,S1与F1之间的距离D1应小于200米[3-5]。考虑到安全因素,复示信号机的具体设置位置需结合章节4中的各详细场景情况进行分析。主体信号机和复示信号机如图1所示。
S1为主体信号机,采用二显示机构,显示方式:一个绿灯为列车允许信号,红灯为列车禁止信号。
F1复示信号机采用绿、黄二显示双菱形机构(机构背板采用发光材料制作),显示方式:主体信号机灭灯,复示信号机灭灯,CBTC下以车载信号为主体信号,非CBTC下为禁止信号;主体信号机显示绿灯,复示信号机显示绿灯,表示前方主体信号已开放,指示列车按规定速度运行;主体信号机显示红灯,复示信号机显示黄灯,表示前方主体信号机关闭,指示注意或减速运行。
三、场景分析
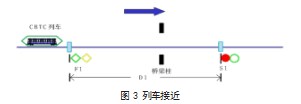
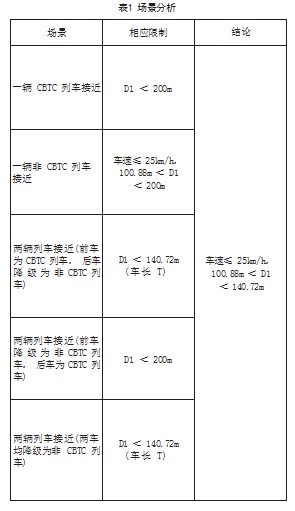
(一)一辆CBTC列车接近
在CBTC模式下,无论D1是多少,CBTC列车信号机S1灭灯,F1复示,S2灭灯,列车根据车载信号行车即可。
因此,该场景无安全风险和限制,D1满足小于200m可视距离即可。
(二)一辆非CBTC列车接近
考虑到项目该处是转换轨入库区域,列车入库时的限速一般为25km/h,当一辆非CBTC列车以25km/h的速度进入复示信号机F1目视范围内,此时复示信号机F1显示禁止通过信号。最坏情况下,车头入库复示信号机才施加紧急制动。
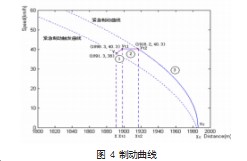
项目车长T=140.72m,重力加速度9.8m/s2,紧急制动率为0.76m/s2,驾驶员反应时间为3s,牵引切断延时0.5s,制动生效延时2s,此处的坡度为下坡2.8%。经计算得知,信号系统从触发紧急制动到完全停车所需的距离为100.88m。具体模型和计算公式如下。
1.制动曲线模型
过程1:牵引阶段,请求EB,牵引未切除。
过程2:惰行阶段,牵引切除,制动未响应。
过程3:制动阶段,施加EB。
(1)牵引阶段
加速度为列车以当前速度行驶的最大牵引能力与X到X2该区域范围的最大下坡加速度之和;时间表示为t1。
(2)惰行阶段
加速度为X到X2该区域范围的最大下坡加速度;时间表示为t2。
(3)制动阶段
加速度为紧急制动保障率及X2到XC该区域范围的坡度加速度之和。
2.计算公式
(1)牵引阶段
S1=v0*t1=25/3.6*(3+0.5)=24.3m
(2)惰性阶段
a1=9.8*sin(arctg(2.8%))=0.27m/s2
v1=v0+a1*t2=25/3.6+9.8*sin(arctg(2.8%))*2=7.48m/s
S2=v0*t2+1/2*a1*t22=25/3.6*2+1/2*0.27*22=19.18m
(3)制动阶段
S3=(vt2-v12)/(2*(a1-a2))=(0-7.482)/(2*(0.27-0.76))=57.1m
(4)从触发紧急制动到完全停车所需的距离
S总=S1+S2+S3=24.6+19.18+57.1=100.88m
为保证列车可以在S1前正常停车,该场景下的D1设置在100.88m至200m之间。如果车速高于25km/h,则列车制动后可能会闯过限制信号机S1,存在与其他车辆相撞或脱轨的安全风险。因此,在该场景下,相关人员需要确保列车运行速度小于25km/h,且D1在100.88m至200m之间。
四、总结
根据场景分析,情况汇总如下表1。为将风险降到最低,D1不仅需要满足小于200m的可视距离要求,还需要小于140.72m(车长T),且为保证足够的刹车距离,D1还应大于100.88m。因此,D1在100.88m至140.72m之间最为合理,同时,对于列车通过该区域的限速要求为不大于25km/h。
【参考文献】
[1]崔科,吕新军.卡斯柯自主知识产权的iCMTC型CBTC信号系统[J].现代城市轨道交通,2014(03).
[2]徐恒亮.CBTC系统中室外信号点灯方式的对比研究[J].铁道通信信号,2020(06).
[3]董波.浅谈CBTC信号系统后备模式的分类及应用[J].铁道通信信号,2013(03).
[4]丰文胜,王永星,薛强.轨道交通全自动无人驾驶场景的新功能需求[J].铁道通信信号,2020(02).
[5]龙安宝.轨道交通移动闭塞安全距离的仿真研究[J].城市轨道交通研究,2012(06).
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/51451.html