SCI论文(www.lunwensci.com):
摘要:为了提高特征点匹配的准确率,本文提出了一种基于改进混合滤波、特征描述符降维、SIFT特征匹配、RANSAC剔除误匹配点以及PSO算法的特征点匹配。首先将场景图像进行滤波处理达到去噪效果,然后通过特征描述符降维以减少计算量,再通过RANSAC对基于SIFT的特征点匹配进行误匹配的剔除,最后使用PSO算法进行优化以寻找到最佳的Ratio值。通过在模糊、较暗、较亮和遮挡4种以机械手为背景的场景下的图像,进行4种算法的对比实验,最后表明本文算法的误匹配率最小,精确度最高。
关键词:特征点匹配;SIFT;RANSAC;PSO
An Improved Feature Point Matching Algorithm Based on SIFT
XU Ao1,HUA Yunsong1,XIA Chunlei1,CHEN Shiyu2
(1.School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093;2.College of Ocean Science and Engineering,Shanghai Maritime University,Shanghai 201306)
【Abstract】:In order to improve the accuracy of feature point matching,this paper proposes a feature point matching based on improved hybrid filtering,feature descriptor dimensionality reduction,SIFT feature matching,RANSAC eliminating false matching points and PSO algorithm.Firstly the scene image isfiltered to achieve denoising effect,then the feature descriptor is used to reduce the dimensionality to reduce the amount of calculation,and then the SIFT-based feature point matching is used to eliminate the false matching through RANSAC.Finally,the PSO algorithm is used for optimization to find the most optimal Ratio value.Through the comparison experiments of the four algorithms in the blurred,darker,brighter and occluded scenes with the manipulator as the background,the results show that the algorithm in this paper has the smallest mismatch rate and the highest accuracy.
【Key words】:feature point matching;SIFT;RANSAC;PSO
0引言
通常的SIFT计算原理都是先从变化的大尺度空间结构中找出特征节点,然后进行重点方位的运算,从而获得位置、尺寸和旋转等不变量[1]。但是在图像采集过程中会受到机器内部原因以及外部环境造成的噪声影响[2],无法有效剔除误匹配特征点以及对于Ratio的准确选取以达到匹配效果最好。
1改进的特征点匹配算法
本节针对以上三个问题,设计了首先在进行图像滤波预处理后,再对特征描述符降维后经过RANSAC剔除误匹配点以及通过PSO(粒子群算法)应用于图像匹配的搜索策略上进行算法优化。优化的流程图如图1所示。
1.1改进的混合滤波
将高斯矩阵长与宽都设置为3,高斯滤波的输出作为卷积核使用奇数3的中值滤波的输入,以起到对图像平滑去噪的作用。
1.2特征描述符降维
具体改进方式为在特征点周围,选择半径r为18个像素的小圆形区域,将其划分为9个步长为2个像素的同心圆,通常采用高斯加权法来求得梯度值,而不同的同心圆环数则用来代表不同的计算区域。由于圆形区域拥有非常好的旋转不变性,有利于统计特征点的主方向,从而大大提高了计算效率。
作为唯一的表示特征点,每个同心圆区域均需对8个方向进行梯度累计,其直方图的范围为0°~360°,总共8个柱,每2个柱间相隔45°。然后,通过从里内向外按序依次存放在各个区间的梯度累计数值,则可以获得9×8=72维的特征向量,最后可以利用归一化法来去除由于灰度值改变所产生的影响。
1.3 SIFT特征匹配
经过构建大尺度空间检测极值点,并取出误匹配点以减少边缘响应[3],再重新标记特征节点的位置,构建特征点的描述子,以及按特征点匹配上述5个步骤对模板图像与场景图像进行特征点匹配。
1.4 RANSAC剔除误匹配点
尽管SIFT描述子空间拥有良好的旋转和尺度不变性,但缺陷是忽视了子空间位置约束,从而形成了错误的匹配对,最终降低了算法的匹配精确度[4]。RANSAC算法经过多次选择数据集后去计算出的模型,并不断迭代到最后计算出质量较好的模型。
1.5粒子群算法(PSO)
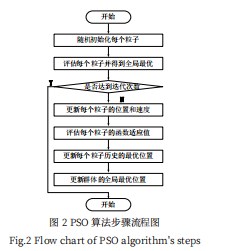
PSO的优点是便于实现,需调节的参数少,并且适用于处理并行性和离散性的问题,因此PSO算法可以应用于图像匹配[5,6]。整个步骤是每个粒子在空间中为自己找到最优估计解,并记为每个粒子的最大值,然后把当前个体极值问题与整个粒子群中的其他粒子共享,在找到当前最优的个体极值问题之后,将它作为整个粒子群的当前全局最优估计解,整个粒子群中每个粒子按照为自己搜索到的当前个体极值问题和整个粒子群共享的当前全局最优估计解,来调节自身的位置和速度[7,8]。具体步骤如图2所示。
更新速度和位置的公式如式(1)和式(2)所示。

同时,ω称为惯性因子,其值为非负,较大时,全局和局部的搜索寻优能力强,但是较小时,全域和局部的搜索寻优能力减弱。因此通过调整ω的大小,就可以对全域寻优性能和局部区域性能进行调整。C1和C2均为加速常量,C1为各个粒子的单独学习因子,而C2为各个粒子的团体学习因子。通常来说,C1和C2都是常量时可以得到较好的解,一般取值范围在[0,4]。Random则取[0,1]上的随机数。Pi则代表第i个变量的一个极大值,而Pg代表全局最优解。
粒子群算法使用了适应度函数,适应度函数是向量的相似度准则[9,10]。一般在匹配中,根据向量相似度准则选用距离的最大相似度函数,而该相似度函数的匹配在拍摄角度和光照的情况下精确度不高。所以,本文的适应度分配函数选取了基于高度与距离的相似度函数,自适应度函数值随着向量相似度的增加而下降,如公式(3)—公式(6)所示。
经过上述计算得到的图片描述子矩阵Y=[y1,y2,…,yn],其中yi(i=1,2,…,n)表示降维后两幅图像的特征点,特征点总数用n来表示。包括图像I与图像J的描述子矩阵Ij={Ij 1,Ij 2,…,Ij 36}和Jk={Jk 1,Jk 2,…,Jk 36},I用作模板图像,J用作场景图像,将降维之后的SIFT特征向量用于代表粒子,并从场景图像J中找到与之相应的配对点,假设该粒子的最佳地点所相对的适合度值低于所设置的阈值点,则配对成功,否则剔除该匹配点。
2特征点匹配实验
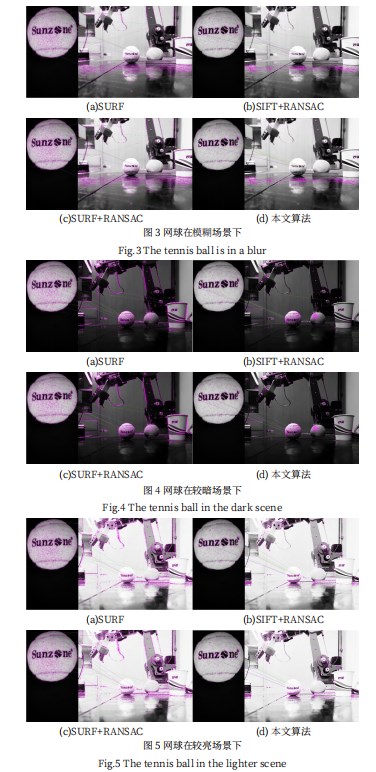
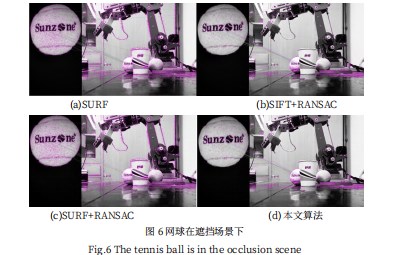
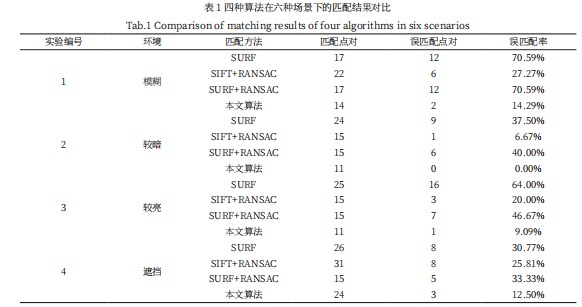
通过采集目标柔性物体在模糊、较暗、较亮和遮挡四种以机械手为背景的场景下的图像,分别采用SIFT+RANSAC、SURF、SURF+RANSAC以及本文算法对六种场景中的目标柔性物体进行识别。本节实验的柔性物体选用网球一个,设置匹配点对、误匹配点对、误匹配率以及运行时间四个实验指标,其中,误匹配率是误匹配点对与匹配点对之比。在进行匹配实验之前,使用了改进后的图像滤波预处理以提升算法运行的效率。
如图3-图6以及表1所示,对于不同姿态和情况的四种场景下,SURF算法的误匹配率为四种算法中最高,匹配效果最差,而在加入RANSAC进行误匹配剔除后,在散乱、较亮和旋转场景下,误匹配率得以下降,而模糊、较暗以及遮挡的误匹配率没有明显变化。而相较于SIFT+RANSAC算法,整体的误匹配率明显小于SURF和SURF+RANSAC这两种方法,并且在各种场景下都有不错的误匹配率,表现出了良好的旋转以及光照不变性,对于模糊、散乱和遮挡也具有不错的匹配效率,因此,本文的改进算法也是基于SIFT+RANSAC进行改进。
本文经过改进优化后算法的匹配准确率为四种算法中最高,且匹配效果也最好。其中,较暗达到了0.00%的误匹配率,而模糊、较亮和遮挡的误匹配率相比前三种算法中误匹配率最低的SIFT+RANSAC平均仍降低了51.21%。本文算法的匹配准确性最高,准确率最高,不过由于运算时间较长,因此适用于对于精确度要求高,但是处理速度要求低的场景下。
3结语
本文结合了改进混合滤波、特征描述符降维、SIFT特征匹配、RANSAC剔除误匹配点以及PSO算法的特征点匹配,并对模板图像网球在模糊、较暗、较亮以及遮挡四种场景下进行特征点匹配实验,对实验结果进行分析表明本文算法的误匹配率最小,精确度最高。在下一步的工作计划中,计划对移动中的物体进行特征点匹配研究。
参考文献
[1]张博文,甘淑.基于改进SIFT算法的山谷地形影像匹配[J].软件,2020,41(2):260-263.
[2]任忠良.一种基于SIFT特征的快速图像匹配算法[J].软件,2015,36(6):53-57.
[3]肖英楠,孙抒雨.基于改进SIFT图像匹配的无人机高精度避障算法设计[J].机械制造与自动化,2022,51(1):237-240.
[4]唐忠智,闫兵,黄燕,等.一种基于双预筛选改进的SIFT图像立体匹配算法[J].激光与光电子学进展,2021,58(22):190-199.
[5]甘小红,覃志东,蔡勇,等.一种基于SIFT的改进优化特征匹配算法[J].智能计算机与应用,2021,11(11):5-9.
[6]Tsz-Wai Rachel Lo,J Paul Siebert.Local Feature Extraction and Matching on Range Images:2.5D SIFT[J].Computer Vision and Image Understanding,2009,06(005):1235-1250.
[7]Vourvoulakis John,Kalomiros John,Lygouras John.FPGA Accelerator for Real-time SIFT Matching with RANSAC Support[J].Microprocessors and Microsystems,2016,11(11):105-116
[8]原伟杰,文中华,彭擎宇.一种基于SURF、FLANN和RANSAC算法的图像拼接技术[J].计算机与数字工程,2022,50(1):169-173+185.
[9]李宏,王鹏,毕波,等.基于改进PSO-SIFT算法的油田遥感图像匹配[J].吉林大学学报(理学版),2021,59(2):342-350.
[10]夏兰婷,陈青.基于SURF的ROI区域的可逆水印算法[J].软件,2020,41(2):125-130.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/50003.html