SCI论文(www.lunwensci.com):
摘 要:为解决物流领域中的自动引导车辆(简称 AGV)在视觉引导方式下实时性差、识别精度低的问题,选用智能车 作为 AGV 的模型车,来进行图像处理和路径识别的算法研究。为提高对道路边缘的快速识别,将原有的边缘检测法改进为一 种多状态边缘检测算法,即考虑一般道路下的多类型图像状态。针对特殊路径的识别,使用陀螺仪角速度积分法来规避车速对 标志位的影响,并通过对照实验证明了该算法的有效可行。经测试和应用,证明了一般情况下图像处理运算速度的提升和特殊 路段识别的高精确性。
关键词: 自动引导车辆 ;CMOS 摄像头 ;动态阈值 ;边缘检测 ;角速度积分 ;对照实验
Edge Detection and Path Recognition of AGV Model Car under Vision Guidance
LIU Zewei1, FENG Jingjing2, LI Wanyu2, JIANG Meixue2, WU Junhua2
(1.College of Engineering, Qufu Normal University, Rizhao Shandong 276826;
2.College of Computer Science, Qufu Normal University, Rizhao Shandong 276826)
【Abstract】:In order to solve the problems of poor real-time performance and low recognition accuracy of automatic guided vehicles (AGVs) in the field of logistics in the visual guidance mode, intelligent vehicles are selected as AGV model vehicles for image processing and path recognition algorithm research. In order to improve the fast identification of the road edge, the original edge detection method is improved on a multi-state edge detection algorithm, that is, the multi-type image states under the general road are considered. For the identification of special paths, the gyroscope angular velocity integration method is used to avoid the influence of vehicle speed on the sign position, and the effectiveness of the algorithm is proved through control experiments. After testing and application, it is proved that the speed of image processing and the high accuracy of identifying special road sections are improved in general.
【Key words】:automated guided vehicle;CMOS camera;dynamic threshold;edge detection;angular velocity integral;controlled experiment
0 引言
在智能制造转型升级与智慧物流创新发展的大趋势 下,以灵活、柔性为显著特征的物流机器人得到愈加广 泛的应用,其中以 AGV 的研究较为广泛 [1]。AGV 引导 方式主要有电磁引导、激光引导、视觉引导等 [2]。与前 三种引导方式相比,视觉引导这种方法不要求设置任何 物理路径,因此,理论上具有最佳的引导柔性。视觉引导主要涉及图像识别技术,这种方法在实际应用上还存 在某些问题,主要是实时性差、识别精度较低。
针对 AGV 的上述问题, 构建了以 MM32F3277 为 控制芯片,并以 MTV9034 摄像头作为图像传感器的智 能车系统。智能车可以为真实的 AGV 行驶提供模拟实 验,其优秀的图像识别等算法可以直接应用在物流智能 车辆上。
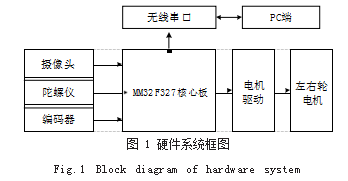
1 硬件系统设计
硬件系统框图如图 1 所示,主要由 MM32F3277 单片机、CMOS 摄像头、陀螺仪、编码器、无线串口、 电机驱动组成。其中 MM32F3277 单片机完成各个模 块的数据处理和算法实现,摄像头、陀螺仪和编码器的 数据作为单片机的输入,电机驱动作为单片机的输出。 无线串口仅在参数调试和实验数据采集时与 PC 端通 信,正常寻迹时关闭。
2 图像处理
智能车引导道路由蓝色背景和白色赛道组成,摄像 头采集的数据涵盖了赛道边界所在的位置信息,两部分 的灰度值差异明显。而图像处理算法的优化在于确保不 丢失关键图像信息的同时剔除冗杂数据量 ;并为单片机 提供一幅更容易判断路况特征的图像,即最适阈值下的 二值化处理 ;最终根据二值化后的黑白图像来进行运算 效率高、识别准确的边缘检测和路径识别,使小车可以 对行进路线做出最优决策。
2.1 原始图像的剪裁压缩
图像数据的特点之一便是数据量庞大,描述图像 信息的数据是由有用数据和冗杂数据组成的。在路径 识别中,灰度图像的部分失真不会造成关键信息丢失。 MTV9034 内部集成出分辨率为 188 列 ×120 行的原始 灰度图像,考虑到单片机的处理速度 [3],选择对原始灰 度图像截取图像的前 60 行,以保证具有更好的前瞻性 视野,同时对每行图像数据进行非均匀压缩处理,最终 形成 120×60 的图像并以此作为一幅路径信息图。通过 试验证明, 120×60 的图像能够保证图像数据的快速处 理,同时能够具有很好的预判性。
2.2 动态阈值分割图像
二值化处理的关键在于阈值的设定 [4]。当环境光线 较强时,图像像素的灰度值不呈线性变化,故大部分研 究者对阈值的设定采用 OTSU 动态阈值分割算法 [5]。但 当系统机械结构、摄像头高度和角度确定后,车体的前 端会给图像的下半部分带来些许阴影,导致该部分图像 的光线变暗即阈值降低。为解决这一问题,通过大量实验,对图形进行截取上下两部分,分别计算两部分的平 均阈值,总结出如公式 (1) 所示 :

其中 DTMOS 为 OTSU 算法计算出的图像全局阈值, j 为图像行数, k 为图像有无阴影的区分行, C 为 常数且 C > 0,该值需根据实际情况而定,本系统设定 C=20。根据上述方法求得的最适阈值来将图像进行分 割,即可得到差异显著的二值化图像。
2.3 多状态边沿检测算法
道路中线的计算准确度直接决定了小车行驶质量好 坏。本系统采用多状态边沿检测算法,通过考虑赛道的 多类型复杂情况,获取和拟合赛道中心线 [6,7]。
2.3.1 一般赛道的中线提取
由于图像底端信息丰富,且噪声出现概率小,故以图 像第二行(从下到上数)为基准行进行处理,遍历至图像 最顶行。为减少梯形失真对结果的影响,对每行中列的扫 描采用缩列的方法,隔一列进行扫描,提高运算速度。
如图 2 所示的基本流程图, 以一般道路的左边线为 例,提出多种情况的处理方案 :
(1)从左向右遍历底部边线,正常寻到满足情况 1,如图 3 所示,后根据图像中左右边界的连续性及趋 势变化,下一行的边界在上一行的边界附近进行搜索, 边界范围即公式 (2) 所示,其中 center_line[i-1] 表示前 一行中线信息。
line_part1[i]=[center_line[i-1]-C1,center_line[i-1]] (2)
(2)当前行丢线则需根据当前行所有像素点全为黑或白来判断。若全白,如图 4 所示,则满足情况 2,边界范围即公式 (3) 所示。
line_part2[i]= [1, 1+C2] (3)

图 3 正常扫线结果图像
Fig.3 Result image of normal line sweep

图 4 全白图像
Fig.4 All-white image
(3) 若当前行像素点全黑, 该情况是复杂的, 导致 不能像情况 2 一样直接判断,需进一步进行讨论,即判 断当前行的上一行中点处像素值。根据本系统与电脑通 过无线串口进行通信,所在上位机得到的多组动态图像 显示发现,由于该算法中的缩列处理,造成了扫线信息的 局限性,故需进一步讨论当前行的上一行中点处像素值。
1) 若上一行中点为黑,则满足情况 3,边界范围即 公式(4)所示,式中 width 为摄像头原始图像裁剪后的图 像宽度。
line_part3[i]=[Width/2-C3, Width-C4] (4)
2) 若上一行中点为白,则满足情况 4,边界范围即 公式(5) 所示。
line_part4[i]=[1, Width/2-C5] (5)
在上述表达式中, C1、C2、C3、C4、C5 为大于 0 的常数, 当摄像头高度和角度均固定好时,该组值需根据实际情 况而定,本系统 C1=5, C2=4, C3=1, C4=3, C5=1。
2.3.2 障碍物的特殊处理
在上述的一般道路外, 还存在一种特殊情况 :前方 存在障碍物,即图像中存在多余中线,会造成中线的误 处理 [8]。本系统采用了 3×3 开窗算法来消除多余中线, 并将此设为车辆减速的标志位,以免判断到障碍物但躲 避不及时。
以当前行 I 和该行中线所在列 J 的交点为中心,获 取其上下左右共 9 个点的像素点,若其中有一个点为黑 则代表中线计算异常,直接跳出循环,将中线截断在异 常点处,进一步判断赛道中心是否存在障碍物 ;反之,则代表扫线正常,可以继续扫线。
2.3.3 赛道边界和中线的拟合处理
在上述算法的基础上, 每行中线存在数组中, 如公 式(6) 所示, 其中 center_line[i] 代表当前 i 行的中线所在 列, right_line[i] 代表当前 i 行的右线所在列, left_line[i] 代表当前 i 行的左线所在列。

在记录中线行的同时,系统也记录了每行的赛道宽 weight[i],即如公式(7)所示。
weight[i]=right_line[i]-left_line[i] (7)
根据赛道宽度和单侧边线的变化趋势,来判断赛道 边界是否需要补线、中线是否需要拟合的情况。
(1)若当前行小于上一行左边线列或当前行大于上 一行右边线列,不符合常规图像阶梯形的变化趋势,则 表示该行左丢线或右丢线,则用上一行的单侧边线列来 代替该行的边线列。
(2)若当前行赛道宽大于上一行赛道宽,则表示该 行左右丢线,并计算两者差值 d。若d < 2,用上一行 的中线来代替该行的中线 ;若 d > 3,进行特殊处理, 比较上一行与上两行的赛道中线。如果不相等,就用上 一行中线代替该行中线 ;如果相等,利用二次插值进行 拟合计算。
3 特殊路径识别
引导道路中, 需对特殊路段进行额外处理。由于图 像数据的丰富性,大多数研究者利用特殊路段的典型图 像特征进行匹配,如十字路口处的左右丢线或边沿拐 角、断路处的部分行全黑等。但随着智能车速度的不断 提升,会导致特殊元素中原有特征匹配不及时,本系统 针对特殊弯道赛段中的圆环和直角弯等,引入一种不受 车速影响的陀螺仪角速度积分法。
3.1 基于 MPU6050 陀螺仪的角速度积分法
赛道特殊元素中,对于圆环的处理难点在于圆环的 进出,且车速的提升会导致判断标志位的难度增大,故 本系统采用陀螺仪角度积分法来进行出环标志位的判 断,该算法不受车速影响且运算量小。车辆在直线行驶 过程中,陀螺仪姿态变化很小,相对车体静止,理想情 况下各个轴角速度为 0,对其进行积分测量角度为 0 ; 但车在拐弯的过程中,某轴方向的角速度不为 0,本系 统为 y 轴,不同速度下积分值相同。算法实现如下 :
(1)对 MPU6050 原始角速度数据消除零偏后 [9], 进行单位转换,如公式(8)、公式(9)所示。
K=gout_m/range_m (8)
gyro_y=(mpu_ gyro_y-zerp_y)/K (9)
其中K 为 MPU6050 的灵敏度, gout_m 为陀螺仪测量 数据输出最大值 ;range_m 为角速度满量程值。故gyro_y 为单位转换后的角速度,单位为° /s ; mpu_gyro_y 为陀 螺仪原始角速度数据 ;zerp_y 为陀螺仪y 轴角速度零点 偏差,单片机进行多次在线调试后,确定 zerp_y=1。
(2)对车辆在圆环内行驶的这段时间的 gyro_y 进行 定积分量化计算,即公式(10) 所示。

其中 dt=3ms 表示对 gyro_y 的周期采样时间 ;t 为从 入环标志位到出环标志位的时间 ;因采样点是离散的, 需将离散信号量化为数字信号, m 为量化系数,拟合多 次曲线后,本系统将 m 设为 3.6 ;θ 为定积分量化后的 角度值,与实际角度相近。
(3) 入环后, 随着车辆的行驶, 角速度定积分量化 后到对应的 θ 时,即为出环标志位。
与圆环出环标志位类似,赛道中直角弯检测也可利 用此算法, θ 取 90°即可。
3.2 测试结果与分析
为验证基于 MPU6050 陀螺仪的角速度积分法的有 效性,在实验室同等光照条件下,对于同一智能车系统 采用同等的图像处理、边缘检测以及相同的 PID 控制 算法,控制采样点个数相同即时间相同,观察速度环 PID 参数为 60 和 45 的两种速度下的 180°弯道角速度 定积分值,进行多组对照实验,实验步骤如下 :
(1)单片机端计算出角速度数据,利用无线串口模 块打包发送给 PC 端的上位机,保存成 txt 文件。
(2)导入 Python 中,对部分脏数据进行数据清洗 并画出散点图,利用线性回归最小二乘法拟合出直线, 最终计算区间内的积分。

图 5 时间 - 角速度散点图及拟合曲线
Fig.5 Time-angular velocity scatter plot and fitting curve
小车以速度环 PID 参数为 60 的速度下的处理结果 如图 5 所示,不同速度相同时间下多组试验的定积分对照结果如表 1 所示。
从表 1 的数据来看,基于 MPU6050 陀螺仪的角速 度积分法在速度不同的情况下,所计算出来的定积分值 基本接近,不存在标志位受速度影响的问题。
4 结语
在物流领域中,通过视觉引导的 AGV 自动行驶是 边缘检测和路径识别等多种技术的综合体现。针对视觉 引导中图像处理的实时性差、识别精度低的问题,在对 原始图像进行相关处理后,引入了一种改进的边缘检测 算法,根据扫线得到的四种情况对道路情况做基本的信 息判断,在保证精准度的同时,降低了单片机处理的负 担 ;对于特殊路径的识别,采用不受车速影响的陀螺仪 角速度积分法。测试和实验结果表明,此设计方案下的 智能车系统能够自主识别路线,沿任意给定路径快速、 稳定地行驶全程。相关算法可以推广至智能物流等领 域,具有较为广阔的应用前景和丰富的研究价值。
参考文献
[1] 杨文华.我国仓储物流机器人发展现状与未来趋势[J].物流 技术与应用,2017,22(9):100-102.
[2] 何勇,王晓丽,杨明来,等.基于视觉和PID算法的重载AGV控 制系统设计[J].仪表技术与传感器,2022(2):84-88+95.
[3] 杨红莉,曾宪阳,郁汉琪.高速摄像头数据采集系统设计及算 法研究[J].电子器件,2017,40(5):1161-1166.
[4] 王晨飞,王莉.灰度图像与伪彩图像颜色模式相互转换研究 [J].唐山师范学院学报,2021,43(3):44-47.
[5] 徐涢基,龚明,龚诚,等.基于双环PID算法与大津法的板球视 觉控制系统[J].传感器与微系统 ,2020,39(11):81-84.
[6] ZHANG H J,JING H R,CHEN T T,et al.Summary of Edge Detection Methods[J].World Scientific Research Journal, 2021,7(8):7.
[7] 许耀华,王文宇,宋文凤.基于摄像头的无人驾驶车辆的道路 检测[J].汽车实用技术,2018(4):35-37+92.
[8] 刘高阳,许智勇,卢雄,等.智能车双车追逐控制系统的研究与 实现[J].机电技术,2018(2):5-7+21.
[9] 冯智勇,曾瀚,张力,等.基于陀螺仪及加速度计信号融合的姿态 角度测量[J].西南师范大学学报(自然科学版),2011,36(4):137-141.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/46164.html