SCI论文(www.lunwensci.com):
摘要:随着经济社会的发展,网球运动已经得到普及,文中针对捡球繁琐这一问题,结合机器视觉、电机控制、PID算法等技术的应用,设计了一种基于嵌入式系统的捡球机器人。该设计以STM32F103芯片为控制核心,主要设计了硬件系统部分、OpenMV物体识别部分、网球跟踪的PID设计部分、OLED显示部分和超声波避障部分。机器人通过OpenMV识别网球并将二维坐标值通过串口发送至STM32F103,进而通过PID算法来控制电机运动,使机器人靠近网球并进行收集,经过120次室内调试,完成度高达93.3%,调试结果表明,该系统的准确性和实用性均满足了使用要求。
关键词:机器视觉;STM32F103;OpenMV物体识别;PID
Design of Ball-picking Robot Based on Embedded System
DUAN Yuanyi,LIU Jiabo,SHEN Yiping
(School of Electrical and Automation Engineering,Shandong University of Science and Technology,Qingdao Shandong 266590)
【Abstract】:With the development of economy and society,tennis has been popular.According to the problem of tedious ball picking,combined with the application of machine vision,motor control,PID algorithm and other technologies,a robot robot is designed.The design takes STM32F103 chip as the control core,and mainly designs the hardware system part,OpenMV object recognition part,tennis tracking PID design part,OLED display part and ultrasonic obstacle avoidance part.The robot recognizes the tennis ball through OpenMV and sends the two-dimensional coordinate value to STM32F103 through the serial port,and then controls the motor movement through the PID algorithm,so that the robot is close to the tennis ball and collects it.After 120 indoor debugging,the completion degree is as high as 93.3%.The debugging results show that the accuracy and practicability of the system meet the use requirements.
【Key words】:machine vision;STM32F103;OpenMV object recognition;PID
0引言
网球作为一项传统的体育运动,深受广大群众的喜爱,作为一种技巧性和灵活性极高的运动项目,参与者在运动结束时往往四肢疲惫,此时捡球会更加劳累,而且会使心跳加速,引起颅腔内血压升高,存在晕倒的风险。所以研究并设计一台可以自动捡球的机器人是市场的迫切需要。文中所设计的机器人融入了机器视觉,解决了传统红外传感器和超声波传感器抗干扰能力差、难以兼顾复杂环境的缺点,具有良好的应用性。
1硬件系统设计
设计的捡球机器人硬件系统分为3部分:第一部分是捡球机器人硬件主体,由STM32F103核心板、车模及电源模块组成;第二部分由OpenMV摄像头、0.96寸OLED显示屏和超声波传感器组成;第三部分是电机控制部分。如图1所示为硬件系统结构图,如表1所示为各类传感器型号,实物模型如图2所示[1]。
1.1机器人硬件主体
捡球机器人需要具备两个特性:速度快和精度高。速度快要求主控芯片工作频率足够高,传统的51系列单片机工作频率一般在11.0592MHz,已经不足以满足设计需求。该设计的主控芯片采用以ARM Cortex-M3为内核的STM32F103C8T6,它的工作频率可以达到72MHz,足以满足对运算速度和精度的要求,同时可以实现与其他MCU之间的串口通信,对电机的脉冲宽度调制和与超声波传感器的IIC通信[2]。
电源模块主要由电源和稳压模块组成,电源由3节18650电池串联组成,为32单片机供电的一路通过XL4015稳压模块将电源电压稳压至5V,为驱动电机模块供电的一路通过XL4016E1稳压模块将电源电压稳压至6V。车模采用双驱差速履带车底盘,底盘为铝合金材质,驱动电机采用520直流减速电机,可载重4kg左右[3]。
1.2各类传感器
该设计一共用到3种传感器,分别是OpenMV摄像头模块、超声波传感器、电容触摸开关,它们均由单片机的5V端口供电。
OpenMV摄像头模块采用OpenMV4 Plus,摄像镜头采用OV5640,它以高性能的STM32H743为控制器,480MHz的主频使得它在进行常规物体识别时响应速度极快;2个异步串口通信总线,可以与STM32F103进行数据传输;该模块通过Python进行编程,极大的简化了视觉代码[4]。
超声波传感器采用HC-SR04。HC-SR04采用升级的解调芯片RCWL-9206,探测距离长达600cm,探测精度0.1cm,感应角度小于15°,完全符合家庭使用的标准,文中的超声波传感器通过IIC通信协议向STM32单片机传输信息。
电容触摸开关用来代替传统的按键开关,在进行工作模式选定时可以有效消除机械抖动带来的误触发,并且使用寿命也比传统按键开关长的多。
1.3电机控制模块
考虑到经济和实用因素,该设计采用L298N模块作为电机控制模块。该模块原理图如图3所示,由图可以看出该模块可以同时控制两个直流电机,该模块的6个引脚与单片机IO口相连,其中IN1和IN2控制左电机的正反转,IN3和IN4控制右电机的正反转,ENA和ENB分别接收来自单片机的脉冲,进而实现对520电机的速度控制[5]。
2系统功能方案设计
2.1网球识别
考虑到网球是规则的绿色球体,所以本设计采用颜色识别来代替模板匹配,极大的提高了识别速度。颜色识别主要靠阈值设定来实现,如图4所示是阈值调节界面,通过对该界面6个滑块的调节找到最适合的阈值,并将阈值填入green_threshold=(0,58,-49,-19,39,-17)中,保存并将程序复制到OpenMV的闪存中,再次运行程序时,OpenMV就会自动识别网球[6]。
OpenMV在识别小球后,需要通过像素比计算出小球的坐标值,再通过串口通信将坐标值传输给单片机。如图5所示为OpenMV IDE界面。
2.2串口通信
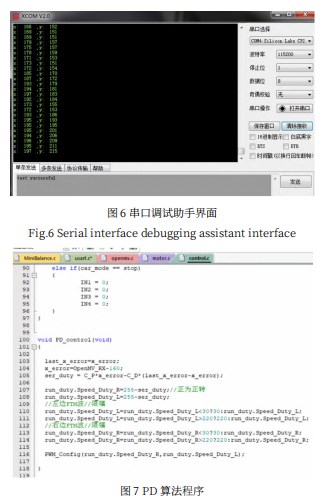
通过串口通信将OpenMV取得的坐标数据传输到STM32中,OpenMV的P5和P4分别作为接收口和发送口与STM32的PA2和PA3相连;OpenMV使用串口3,STM32使用串口2,均采用115200波特率,STM32接收到的二维坐标值如图6所示[7]。
2.3网球闭环追踪设计
当OpenMV识别到网球后,需要机器人不断进行位置矫正直至网球进入网框中为止(即网球在OpenMV的视野中消失)[8]。当OpenMV将二维坐标值传输到STM32后,STM32将坐标值代入到如图7所示程序中,该程序实现了比例-微分算法,将计算后的数值转化为脉冲宽度,加到电机控制模块的ENA和ENB上,实现了对电机的闭环控制[9]。
2.4超声波测距及OLED显示
为了防止机器人在工作过程中因为靠近障碍物而发生碰撞,该设计加入了一个HC-SR04超声波传感器,该传感器通过IIC通信向STM32传送距离信息,当检测到前方物体与传感器距离过小时,机器人会放弃当前的网球,转而寻找其他网球[10]。
OLED显示屏采用四脚的0.96寸OLED屏,该模块通过IIC通信接收来自STM32的信息,将OpenMV测得的x,y值,以及超声波传感器测得的距离值显示在屏幕上[11]。
3结语
文中设计的基于嵌入式系统的捡球机器人主要针对室内网球拾取,通过电容触摸开关启动机器人,机器人将会自动寻找网球,并通过闭环PD控制自动靠近网球实现收集功能;当机器人前方出现障碍物时,超声波传感器可以将距离信息传至单片机,当距离过小时,机器人会自动规避;OLED可以实时显示二维坐标值和前方障碍物与机器人的距离。该设计提供了一种简单、实用、可靠的网球识别方法,创新性地引入了机器视觉和超声波测距技术,极大地提高了捡球机器人的智能化、自动化程度,具有广阔的应用场景。
参考文献
[1]马飞.一种智能捡球机器人的多传感器数据采集系统设计[J].信息技术与信息化,2021(9):243-245.
[2]章明干.AI捡球机器人[J].中国科技教育,2021(7):64-65.[3]周旭,周海波,陈睿,等.基于双目视觉的机械手捡球机器人设计[J].机床与液压,2020(3):34-40+79.
[4]陈卫,邓志良.捡球机器人路径规划算法研究及仿真[J].计算机仿真,2020(10):291-296.
[5]范昭君.智能控制在自动捡球机器人中的应用[J].自动化技术与应用,2020(5):67-71.
[6]陈青华,左太虎,徐一红.基于OpenMV的智能捡球机器人的设计与实现[J].信息技术与信息化,2020(10):210-213.
[7]吴伟键,曾毅杰,冯贵斌.智能网球收球机器人系统[J].科技视界,2019(5):90-91.
[8]徐霁,沈茜.基于Android控制的乒乓球捡拾机器人设计[J].信息与电脑,2019(5):120-123.
[9]刘玲,靳伍银,王洪建.基于STM32自动网球拾取机器人设计[J].南京信息工程大学学报(自然科学版),2020(5):609-613.
[10]张宇成,王潮涌.基于STM32和OpenMV的图形识别与测量系统[J].电子测试,2021(15):43-46.
[11]张博文,马德彬,宋永旭,等.OpenMV的红绿灯识别测距系统设计[J].电子世界,2021(6):154-155.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/41131.html