SCI论文(www.lunwensci.com)
摘 要:针对目前人们参观博物馆或其他展品时体验相对较差,如缺乏专业人员讲解或讲解费用较高等问题,设计了基于 4 轮麦克纳姆轮的导游解说助手(以下简称 :导游助手)。系统采用 MM32F103C8T6 控制器,通过电磁传感器采集展厅规划 的电磁路线信息,编码器测量四轮速度,比例积分微分控制算法(以下简称 :PID)闭环控制,实现自动引导旅客参观 ;结合 RFID 感知展示作品信息,通过 DTM3202 模块播放展品语音简介。通过设计与调试,该导游助手实现了在 0 ~ 2.2m/s 速度范 围内自动引导游客参观讲解,减少了对人工讲解员依赖,提升了游客的参观体验。
关键词:麦克纳姆轮 ;比例积分微分控制算法 ;RFID 感知 ;语音播报
Design and Implementation of Tour Guide Interpretation Assistant Based on
Mcnamu Wheel
YOU Yang
(The College of Post and Telecommunication of WIT, Wuhan Hubei 430073)
【Abstract】:In view of the relatively poor experience of people visiting museums or other exhibits, such as lack of staff to explain or high cost of explanation, a guide interpreter based on 4 rounds of Mecanum wheel (hereinafter referred to as the guide assistant) is designed. The system uses the MM32F103C8T6 controller to collect the electromagnetic route information planned in the exhibition hall through electromagnetic sensors, the encoder measures the speed of the four wheels, and the proportional integral derivative control algorithm (hereinafter referred to as PID) closed-loop control realizes automatic guidance of passengers to visit; combined with RFID perception to display works information, play the voice introduction of the exhibits through the DTM3202 module. Through design and debugging, the tour guide assistant can automatically guide tourists to visit and explain at a speed within the range of 0 ~ 2.2m/s, which reduces the dependence on manual guides and improves the visitor experience of tourists.
【Key words】:mecanum wheel;PID;RFID sensing;voice broadcasting
1 系统的总体设计
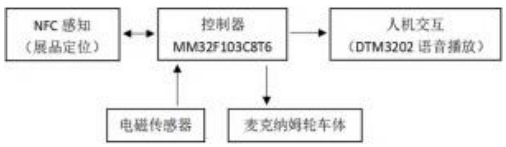
图 1 系统总体框架
Fig.1 Overall framework of the system
系统总体框架如图 1 所示,以麦克纳姆轮车为导游 助手载体, MM32F103C8T6 为控制器,通过工字电感、 电容谐振检测电磁引导线信号,采用方向 PD 环和速度PID 环闭环控制车体自动寻线行驶 ;最后采用 RFID 传 感器定位感知作品信息,并进行人机交互,从而实现自 动引导游客参观讲解。
2 系统的硬件设计
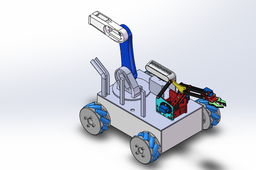
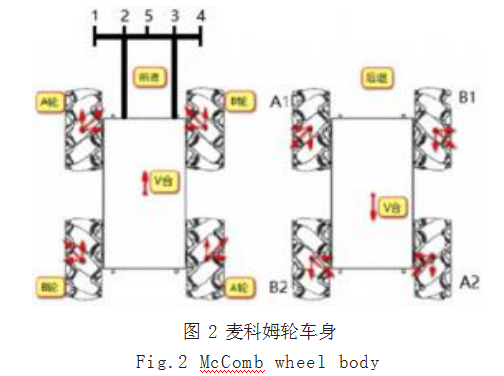
2.1 麦克纳姆轮车体
麦克纳姆轮是瑞典麦克纳姆公司的专利,基于一个 有许多位于机轮周边的轮轴的中心轮,这些成角度的周 边轮轴把一部分的机轮转向力转化到一个机轮法向力上 面,实现全方位移动 [1]。导游助手的车身结构如图 2 所 示,麦科姆轮采用 ABAB 轮排列方式,图中 1、2、3、4、5 分别为电磁传感器分布。
2.2 系统控制器电路设计
系统控制器采用 MM32F103C8T6 芯片, ARMCortex TM-M3 内核的 32 位微控制器, 工作频率 96MHz, 内 置高速存储器,丰富的 I/O 端口和外设。系统核心板电 路如图 3 所示,包含时钟电路、程序下载电路、复位电 路、供电电路等。
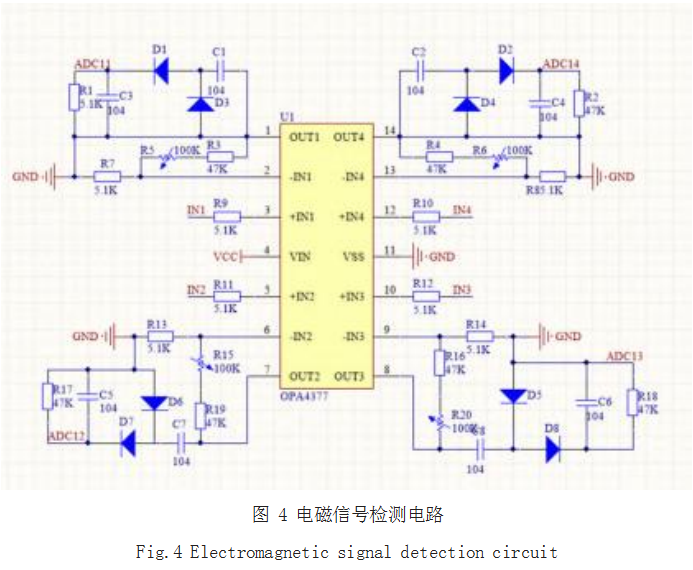
2.3 电磁信号检测电路
电磁信号检测电路如图 4 所示,其中包含了三个部 分 :信号拾取(电感和电容谐振), 信号放大(OPA4377 集成四运放),信号调理(二极管检波,将信号整定为直 流信号)。最后信号输入 MM32F103C8T6 的 A/D 引脚。
2.4 电机驱动电路与编码器测速模块
该导游助手 4 个麦科姆轮,分别由独立的直流电机 驱动。通过 MM32F103C8T6 输出不同占空比的 PWM (频率 17KHz) 控制 HIP4082 芯片驱动 N-MOS-LR7843 直流斩波,实现麦科姆轮正反转、调速。
编码器测速模块采用 1024 线带方向 Mini 编码器, 通过 MM32F103C8T6 的定时器 T2 输入捕获,用于测量 4 个麦科姆轮的转速,编码器与 MCU 引脚对应关系如 表 1 所示。
表 1 Mini 编码器引脚与 MCU 接线
Tab.1 Connection between pin of Mini encoder and MCU
| 引脚名称 功能 对应 MM32F103C8T6 接口引脚 备注 |
| Pin3 |
LSB |
PA0/PA1/PA2/PA3 |
对应 4 个编码 器 , 计算脉冲 |
| Pin4 |
Dir |
PB12/PB13/PB14/PB15 |
对应 4 个编码 器 , 旋转方向位 |
| Pin5 |
Z 相 |
PC6/PC7/PC8/PC9 |
对应 4 个编码 器 , 零位信号 |
2.5 RFID 模块及语音播放模块
系统 RFID 模块采用 M2940B-HA RFID 模块读写 高频非接触 IC 卡信息, 通过串口与 MM32F103C8T6 的 UART3(PB10、PB11) 通信, 能够非接触 5cm 处感知 IC 卡信息。语音模块采用 DTM3202 模块,通过串口与MM32F103C8T6 的 UART1(PA9、PA10) 通信, 支持 控制 1024 条语音播放。该模块自带 USB 直接更新语音 内容, 音量大小可调 ;最大可扩展 32G 内存卡,可以容 纳一定规模展品的简介内容。
3 系统软件设计
3.1 系统的总体软件框架
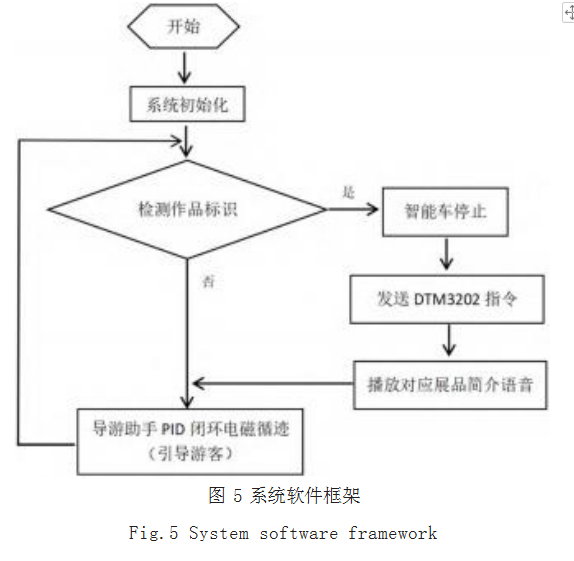
系统的总体软件设计框架如图 5 所示, 包括系统初 始化、检测 NFC 信号定位展品标识、PID 闭环电磁循 迹、语音模块播放等。
3.2 导游助手 PID 控制自动循迹(引导游客)
该程序设计为系统的核心,包括电磁信号的检测及 数据处理,读取编码器实时数据,增量式数字 PD 实现 方向控制, 增量式数字 PID 实现速度控制, 实现控制 导游助手的运动姿态。
3.2.1 电磁信号的检测及数据处理
电磁信号的检测程序包括 ADC 模块初始化,电磁 传感器信号线性归一化到 0-100% 范围 [2],归一化表达 式如式(1)所示,其中 B(i) 为第 i 个电磁传感器采集 的值,Bmax(i) 为第 i 个电磁传感器采集的最大值。
每 5ms 对 5 个横向的电磁传感器 ( 电感器排列如 图 1 中所示 ) 依次采集数据,然后中值平均滤波处理, 比和求偏差处理,电磁偏差 e 表达式如式(2)所示。
3.2.2 麦科姆轮运动姿态控制
通过 MCU 分别控制麦科姆轮(A1、B1、A2、B2) 旋转的方向、速度来实现全向运动姿态 [3]。以图 2 麦克 纳姆轮车身运动参考方向为例,智能车运动姿态具体控 制如表 2 所示。
表 2 智能车运动姿态
Tab.2 Motion posture of intelligent vehicle
| 智能车运动姿态 |
A1 |
B1 |
A2 |
B2 |
| 前进 |
前进 |
前进 |
前进 |
前进 |
| 后退 |
后退 |
后退 |
后退 |
后退 |
| 横向左移 |
后退 |
前进 |
后退 |
前进 |
| 横向右移 |
前进 |
后退 |
前进 |
后退 |
| 逆时针旋转 |
后退 |
前进 |
前进 |
后退 |
| 顺时针选择 |
前进 |
后退 |
后退 |
前进 |
3.2.3 导游助手 PID 闭环控制自动引导
PID 算法是结合比例、积分和微分三种环节于一体 的控制算法,适用于对被控对象模型了解不清楚的场 合,增量式数字 PID 表达式如式(3)所示 [4] :
其中,Δu(k) 表示当前增量,u(k-1) 表示上一次输 出,Kp、Ki、Kd 为比例、积分、微分常数,e(k) 为当 前偏差,e(k-1) 为上次偏差,e(k-2) 为上上次偏差。
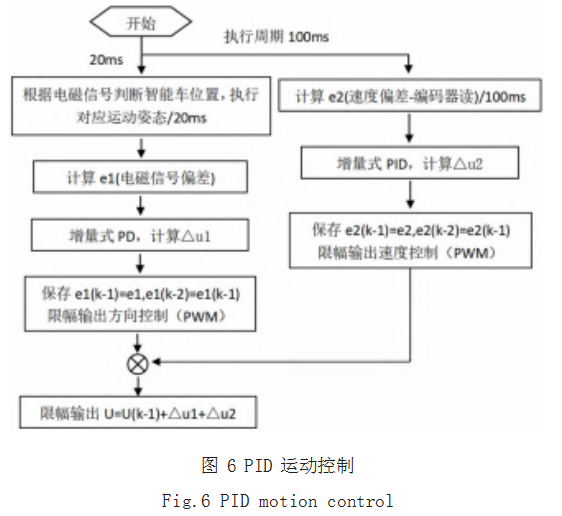
系统结合电磁信号数据、运动姿态控制、编码器反 馈速度,使用 PID 算法控制导游助手全向运动和速度, 其中方向 PD 环执行周期 20ms,速度 PID 环执行周期 100ms,具体程序流程图如图 6 所示。
3.3 导游助手定位及展品信息语音播报
导游助手定位及展品信息语音播报程序主要包括 : M2940B-HA RFID 模块读写高频非接触 IC 卡信息 [5], 定位具体展品号, 然后通过 DTM3202 读取内存卡对应 展品的相关信息,并进行播放。
4 系统测试
系统调试平台如图 7 所示,电磁引导线采用 20kHZ, 电流 100mA,正弦交流信号。这里主要说明一下调试 的核心问题 :电磁信号采集和 PID 参数调节。
将小车放在电磁线的正中间,调整电磁信号板上 的电位器,OPA4377 运放输出值 B1 ≈ B4,B2 ≈ B3, B5 的值最大,然后进行数据归一化处理到 0%~ 100% 范围。
由于系统的数学模型难以建立, PID 参数调节依靠 实验试凑法, P 参数调节,由小变到大,直至得到反应 快、超调小的响应。I 参数调节,先将比例系数减小为 原来的 50%~ 80%,再将积分时间由大变小,并相应 调整比例系数,反复试凑至得到较满意的响应,确定比 例和积分的参数。D 参数调节,微分时间由零逐渐加大, 同时相应地改变比例系数和积分时间,反复试凑至获得 满意的控制效果,最终方向环参数 P=1.0,D=5.0,速度 环参数 P=0.1、I=1、D=0.5。实现了导游助手自动引导 游客参观讲解(引导速度在 0 ~ 2.2m/s 范围可调)。
5 结语
上述基于麦克纳姆轮的导游解说助手具备系统稳 定,自动引导速度在 0 ~ 2.2m/s 可调,识别展品信息 准确,语音播放准确流畅,达到了预期设计的目标。但 随着智能化的快速发展,系统在人机交互上有待提升 (如智能识别、语音交互等),这个也是以后深入研究的 方向。
参考文献
[1] 黄达城,贾茜,朱奇滨,等.Mecanum轮式机器人运动分析与 结构设计[J].科技创新导报,2015,12(19):4-5.
[2] 张晓峰,钟一博,李清晨,等.电磁智能车循迹算法[J].计算机 系统应用,2014,23(12):187-190.
[3] 何超.基于麦克纳姆轮的全向自行式移动平台研发[D].西安: 西安理工大学,2018.
[4] 唐玉红.PID控制方法研究[J].电子世界,2019(7):65-66.
[5] 曲井致,刘伟鹏,吴国瑞,等.基于半有源RFID电能表的自动 化检定流水线及智能仓储系统[J].电测与表,2018,55(12): 104-107.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/38036.html