【摘要】近年来,狭窄空间疏散的研究引起了越来越多研究者的关注。因地铁隧道疏散平台空间狭窄、环境黑暗,行人在运动时往往需要寻找依靠物来保持运动的稳定性,而墙体就是行人最主要的依靠物之一。文中构建了考虑沿墙行为的拓展的元胞自动机模型,在传统模型的基础上融入了行人的沿墙倾向,并设计了多速度的运动规则。结果表明,沿墙倾向的增大会使人员疏散时间先减少再增加最后保持稳定,人流中墙体敏感型行人的增多会使疏散时间增加,但同时极大地提高了疏散的安全性。
【关键词】地铁隧道疏散,元胞自动机,沿墙倾向,敏感行人型
Research on Pedestrian Evacuation Model of Subway Tunnel Platform Considering Behavior along the Wall
AI Dong1,ZHUANG Yi-fan1,SONG Xiao-min2,3,RAO Ya4
(1.School of Urban Rail Transit,Shanghai University of Engineering Science,Shanghai 201620;2.China Academy of Transportation Sciences,Beijing 100029;3.Key Laboratory of Intelligent Transportation Industry for Urban Public Transport,Beijing 100029;4.Technology Center of Shanghai Shentong Metro Group Co.,Ltd.,Shanghai 201103,China)
【Abstract】In recent years,the study of evacuation in subway tunnels has attracted the attention of more and more researchers.Due to the narrow space and dark environment of the evacuation platform in subway tunnels,pedestrians are prone to looking for reference objects during movement for keeping stability,and the wall is one of their main reference objects.This article constructs an improved cellular automata model for pedestrian evacuation on the subway tunnel platform,incorporating pedestrians'wall inclination based on the traditional model,and designing movenment rules with multiple speeds.The results show that the increase in the tendency to walk along the wall will first reduce the evacuation time,then increase it,and finally maintain a stable evacuation time.The increase in sensitive pedestrians in the flow of people will increase the evacuation time,but at the same time greatly improve the safety of evacuation.
【Key words】subway tunnel evacuation;cellular automata;wall inclination;sensitive pedestrian
1引言
随着城市轨道交通的现代化建设,地铁运营安全受到了全社会的高度关注。地铁隧道安全疏散是地铁运营安全的重要一环,是地铁运行中发生事故时的重要安全保障。
地铁隧道疏散平台位于封闭、狭长的地铁隧道内部,用于紧急情况下乘客疏散和安全撤离。它通常位于隧道内部的适当位置,可以提供一个相对安全的空间,使乘客能够在发生紧急情况时撤离和等待救援。地铁隧道疏散平台的具体设计和配置可能因地铁系统和法规要求而有所不同,一般而言,地铁隧道疏散平台主要包括平台板、支架、梯步、扶手、挡板和墙体等部分,其中墙体是疏散平台的主要支撑结构之一,承受着平台板、支架、梯步等部件的重量,以及乘客在疏散过程中产生的动态荷载[1]。同时,墙体是行人在紧急疏散过程中最重要的依靠物,使行人能够在狭窄的疏散平台上保持运动的稳定性。
近年来,学者们开展了许多疏散模型研究。孙华锴等[2]建立了考虑视觉障碍行人的场域元胞自动机疏散模型,通过模拟视觉障碍行人活动场所人群疏散的运动状态和演化过程,探究帮助行为、视觉障碍行人占比、出口位置对整体疏散结果的影响。王冠宁等[3]在元胞自动机模型的基础上,增加了恐慌传播机制,模拟存在危险源时行人的恐慌疏散行为,研究救援与引导策略对疏散过程的影响,以及有限视域条件下救援人员对恐慌行人的疏散引导策略。Xiaoxia Yang等[4]根据行人在紧急情况下的行为特征提出了行人动力学修正方法,构建了考虑恐惧、紧张等情绪的社会力模型,并基于北京南站的实际场景建模,研究了引导人员在疏散过程中的作用。
现有模型虽然已经描述了隧道内疏散行为,但是对平台疏散的研究较少,也尚未考虑沿墙倾向对疏散的影响。本文将通过构建考虑沿墙行为的扩展的元胞自动机模型,研究具有沿墙倾向的行人在疏散过程中的特性。
2考虑沿墙行为的地铁隧道疏散元胞自动机模型
元胞自动机模型是一种离散模型,由规则格网中的一系列模型单元(即元胞)组成,每个元胞都遵循一套局部规则进行状态更新,这些局部相互作用导致元胞群体在整体上展现出复杂的动态演化行为。该模型被广泛应用于各种自然现象和社会现象的模拟,也常被应用在行人疏散的研究之中[5]。
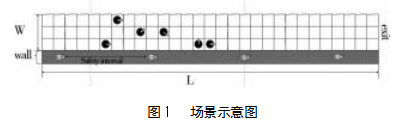
在本文所构建的地铁隧道疏散元胞自动机模型中,考虑人体肩宽的实际尺寸,将单个元胞尺寸设定为0.4m×0.4m[6]。如图1所示,行人在左侧出口处以60人/(min·m)[7]的流速生成,在疏散平台上在静态底场的作用下向着出口方向行进。
为使构建离散系统的元胞自动机模型能够体现多速度的疏散运动,本文设置了三种代表性的速度作为行人的速度大小:v min=0.83m/s、v mid=1.25m/s、v max=2.5m/s,分别代表拥挤、正常行走和快速行走下的速度,ΔL为单元格的长度。行人经过一个元胞长度的距离所需时间分别为0.48s、0.32s、0.16s,因为他们都是0.16的倍数,因此只要用公式(1)(2)计算时间步长Δt,就可以用该时间步长对所有行人进行速度的更新,在每个时间步中,满足速度条件的行人移动到可达域内的空位格点。
时间步长Δt定义为元胞长度与最大速度的比值:
其中,ΔL为元胞长度,速度为v i的行人更新间隔时间为ti。
2.1基于沿墙偏好的效用场与动态场
在隧道平台疏散中,墙体构成了地铁隧道平台疏散场景中最重要的外部环境,行人在疏散平台上朝着出口方向移动。本文利用效用场来描述他们的作用,效用场Uij为静态底场Sij、动态场Dij和墙体场Wij的叠加,如(3)所示。
其中,αs、αd、αw分别为静态底场、动态场、墙体场的系数。
2.1.1静态底场
静态底场描述了行人随前方安全标识指引下的运动。(i,j)点处的静态底场场值Sij如式(4)所示。
式中,(i′,j′)为入口,记坐标为(ik,jk),d为点(i,j)到出口k的距离。本文的静态底场是一个场值变化均匀的场,因此并不能体现运动的规律,只能用来表示行人运动的方向。
2.1.2墙体场
墙体场以向轨道侧衰减的形式来表现隧道疏散中墙体对行人的吸引作用,从而影响行人在沿墙方向的运动。这可以模拟隧道平台疏散中行人对墙体的依靠,使行人依概率做靠近墙体的运动。
式(6)为墙体场公式,i为元胞位置在沿墙方向上的坐标,ρw为沿墙倾向系数。他们分别以各自的形式衰减,并且由ρw来控制衰减的强度。
2.1.3动态场
元胞自动机中的动态场是一个随时间变化的场,反映了行人实时的状态以及行人与外界之间的交互。具体来说,动态场是由疏散人员决定的,随着疏散人员位置状态的变化而一起变化的场域。每个元胞的场值矩阵包含了经过该元胞的行人数量,并且每个元胞的场值在不同的时间步内都会有所变化,即随着仿真时间以一定的概率向周围扩散或衰减。这种变化又会通过更新规则反过来影响疏散人员的运动,从而模拟出行人之间以及行人与环境之间的交互作用,使得整个疏散过程更加真实和富有生命力。
最初,所有单元格的动态底场都被设置为零。在每一个时间步中,每个移动行人的原始单元的动态场值D增加1,如式(7)所示。
同时,根据扩散和衰减规律进行修正,如式(8)所示。
其中,α、δ分别为扩散系数和衰减系数,在本文中,α取0.1,δ取0.8。
2.2转移概率
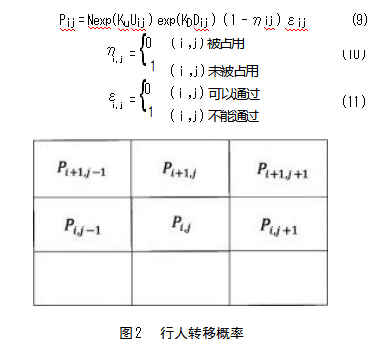
基于地铁隧道平台疏散的场景特征,行人不会出现向后运动的情况,而是在出口的引导下向前行走。在每个时间步内,行人的转移概率如式(9)及图2所示,表示行人因环境和运动状态对自己下一时间步运动的决策。Uij为效用场,Dij为动态场。N为归一化系数;ηij为元胞占用系数;εij为障碍物影响系数;Ku、KD为敏感因子,表征两种场的所占权重,其取值范围为(0,1]。
3平台区域划分与不同沿墙敏感性行人
3.1平台区域划分
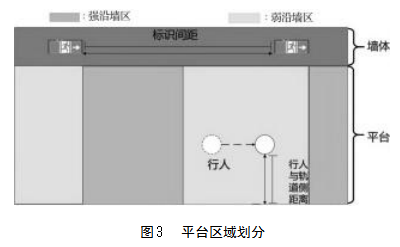
在地铁隧道疏散平台的设计中,我们特别关注行人与周围环境的交互,尤其是墙体和安全标识对行人行为的影响。为了更好地理解这些影响因素,本文将平台上每两个相邻安全标识之间的空间划分为两个区域:弱沿墙区和强沿墙区,如图3所示。
弱沿墙区是指与前方安全标识距离在20米以内的区域[8]。在这个区域内,由于安全标识的明显引导和指示作用,行人往往更加关注并遵循标识的指引进行移动。因此,墙体的作用在弱沿墙区内相对较小,行人可能较少依赖墙体进行定位或导航。安全标识的存在有效地引导了行人的方向和路径选择,成为疏散过程中的主要参考点。
相对而言,强沿墙区是指与前方安全标识距离超过20米的区域。在这个区域内,由于距离标识较远,行人可能无法清晰地看到或理解标识的信息,因此墙体的作用变得更加显著。行人倾向于沿着墙体移动,以寻找出口或避免进入轨道区域。墙体的存在为行人提供了一个可靠的参照物,帮助他们在缺乏明确标识指引的情况下进行方向判断和路径选择。
因此,弱引导区的沿墙倾向系数ρ始终与强引导区的沿墙倾向系数ρw成比例关系,如式(12)所示。
3.2墙体敏感型与墙体不敏感型行人
行人的行为和反应因其个体特性的差异而有所不同。为了更好地理解和模拟这种差异,本研究将行人分为两类:墙体敏感型行人和墙体不敏感型行人。
墙体敏感型行人指的是那些在疏散过程中对周围环境变化反应较为强烈的人群[9]。这类行人对于墙体的存在表现出明显的沿墙行走行为,倾向于保持在墙体附近移动,这可能是出于寻找安全感或避免与他人发生拥挤的心理。墙体对他们的影响显著,他们在疏散过程中会不断调整自己的行走路径以贴近墙体,这种行为模式在紧急情况下可能有助于他们保持方向感和减少恐慌。
相对而言,墙体不敏感型行人对周围环境的感知和反应较为迟钝。墙体的存在对他们的行走路径选择影响较小,他们可能不会特意沿着墙体行走,而是根据自己的目的地和周围行人的动态来选择合适的路线。这类行人在疏散过程中可能更加注重个人行走的便捷性和效率,而不太受环境细节的约束。
在隧道平台疏散的元胞自动机模型中,对这两类行人的不同行为特性进行准确刻画和模拟,有助于更全面地评估疏散过程的安全性和效率,进而为隧道等公共设施的安全设计和管理提供科学依据。通过对比分析这两类行人在不同疏散场景下的表现,可以进一步探讨沿墙因素对行人疏散行为的影响机制,为优化疏散策略提供理论支持。
本文在模型中设置了不同的沿墙倾向系数ρw来表征不同墙体敏感型行人,不敏感型行人的ρw值为1,具有较小的沿墙倾向;敏感型行人的ρw值为5,具有很高的沿墙倾向。
4模型仿真结果
4.1沿墙行为对疏散时间的影响
为在同一场景内充分预留强沿墙区和弱沿墙区,本文在足够大的安全标识间隔—50m标识间隔的场景中进行模拟,平台宽度为1.2m,疏散人数为60人。
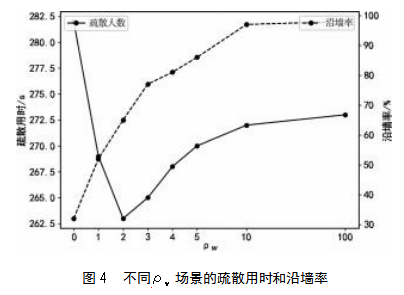
沿墙倾向系数ρw反映了行人运动的有序性。如图4所示,随着ρw的增大,混乱的行人运动的有序性增强,使得疏散时间逐渐减少。行人的沿墙率也随着ρw的增大而明显增加。
当ρw≥2时,随着沿墙率达到64.7%,此时这种有序性不会继续带来疏散效率的增益,转而开始使疏散时间增加。随着沿墙率的增加逐渐放缓,当ρw≥10时,沿墙率已经升至98.5%,几乎达到饱和,疏散时间保持稳定,稳定在了272s。
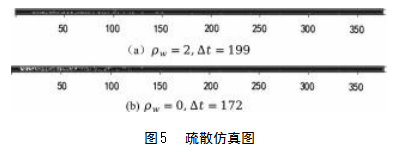
如图5(a)所示,高沿墙倾向的行人流进行有序的沿墙运动,行人密度并不高,每名行人都有较大的移动空间。如图5(b)所示,无沿墙倾向场景下,行人在沿墙方向上进行随机游走,导致行人间的冲突剧增,并因过多的冲突而形成了高密度区,造成了一定程度的拥堵。
4.2不同沿墙倾向的行人对疏散效率的影响
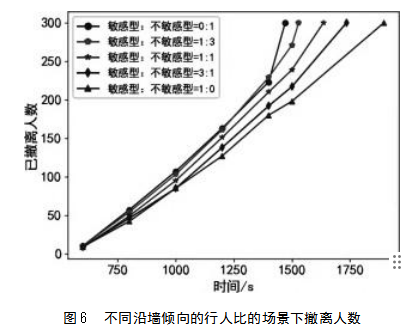
在本研究中,为了深入探究不同敏感型行人对地铁隧道平台疏散效率的影响,共设置了五个不同的工况,分别对应敏感型行人占总行人数的0%、25%、50%、75%和100%。通过这些工况的模拟,更全面地了解敏感型行人对疏散过程的影响机制。
如图6所示,随着敏感型行人比例的增加,行人流的单一性逐渐增强,疏散空间也相应受限。这是因为敏感型行人在疏散过程中会更加关注安全标识和墙体的影响,倾向于沿着标识指示的方向移动,并在接近墙体时表现出明显的避让行为。这种高度依赖标识和墙体的行为模式导致行人流变得更加单一,减少了不同行人之间的相互作用和灵活性。
同时,随着敏感型行人比例的增加,疏散空间也相应受限。因为敏感型行人在移动过程中会更加谨慎,对墙体的避让行为更加明显,这在一定程度上减少了可利用的疏散空间。当敏感型行人占据较大比例时,整个疏散过程可能会受到较大的限制,从而影响整体的疏散效率。因此,随着敏感型行人比例的逐渐增加,观察到的疏散时间也逐渐增大。
这一趋势表明,敏感型行人的增多其实会对疏散效率产生负面影响。为了优化地铁隧道平台的疏散方案,往往需要综合考虑行人的敏感型差异,并合理设置安全标识和墙体等环境因素,以确保在紧急情况下能够实现快速、有效的疏散。
在疏散过程中,如果行人下一时间步的目标点与附近行人下一步更新的目标点相同,便称之为发生了一次冲突。在一个冲突的目标点中,只有一名行人会获胜并占据该目标点,而其他失败的行人会保持上一时间步的位置静止不动,他们之间失败或者成功的概率是相等的。因此,冲突的发生会导致局部出现拥堵的情况。
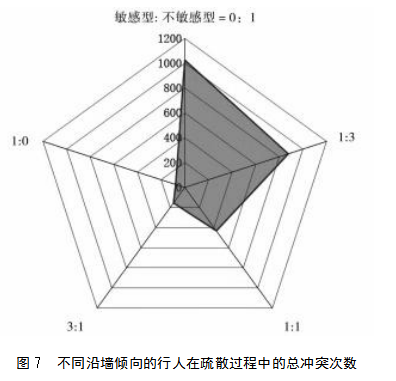
如图7所示,当敏感型行人的比例为0%,即所有行人对墙体均不敏感时,行人间发生的冲突次数最多,达到了1025次。这是因为这些行人在疏散过程中较少关注墙体的指引,导致他们的行动路径更加随机和混乱,从而增加了相互之间的冲突几率。然而,当敏感型行人的比例增加到25%时,冲突次数下降至876次。这表明即使只有一小部分行人对墙体敏感,也能够在一定程度上减少行人间的冲突。这部分敏感型行人通过更加有序地遵循标识和墙体的指引,有效避免了与其他行人的碰撞和冲突。随着敏感型行人比例的进一步增加,冲突次数继续显著下降。当敏感型行人占50%时,冲突次数减少到432次;当占75%时,冲突次数更是锐减至155次;而当所有行人都对墙体敏感时,冲突次数降至最低的78次。这一趋势清晰地表明,敏感型行人的增多有助于减少行人间的冲突,提高疏散过程的整体效率和安全性。
造成这一现象的原因在于,墙体敏感型行人(即谨慎的行人)更加关注并遵循疏散过程中墙体的指引,其行动路径更加有序和可预测。这种有序性不仅减少了自身与其他行人发生冲突的可能性,同时也为其他行人提供了更加清晰的行动参考,从而降低了整个疏散过程中冲突发生的频率。
5结论
本文改进了传统的元胞自动机模型,构建了基于沿墙行为的地铁隧道平台疏散元胞自动机模型,分析沿墙行为对疏散效率的影响。依据沿墙倾向的大小,将行人分为墙体敏感型和墙体不敏感型,并根据安全标识划分了弱沿墙区和强沿墙区两个区域,在离散的元胞模型中建立了三速度同步更新的机制。通过探究沿墙行为对疏散时间的影响以及不同比例的墙体敏感型行人场景下的疏散效率,揭示了行人的沿墙倾向对行人疏散速度和疏散安全性的影响,这为疏散过程中行人的行动提供了参考,对于优化地铁隧道平台的疏散设计和提高紧急情况下的疏散效率具有重要的指导意义。
[参考文献]
[1]Dirk Helbing,Illes J.Farkas,Peter Molnar,et al.Simulation of pedestrian crowds in normal and evacuation situations[J].Pedestrian and Evacuation Dynamics,2002(01):21-58.
[2] 孙华锴,陈长坤,翁佳俊,等.考虑视觉障碍行人的疏散模型[J].中国安全科学学报,2023,33(12):183-191.
[3]王冠宁,陈涛,郑晖杰,等.考虑恐慌情绪和沿墙引导的行人疏散模型[J].中国安全科学学报,2022,32(9):111-117.
[4]Xiaoxia Yang,Hairong Dong,Qianling Wang,Yao Chen,Xiaoming Hu.Guided crowd dynamics via modified social force model[J].Physica A:Statistical Mechanics and its Applications,2014,411:63-73.
[5]周美琦.基于元胞自动机模型的地铁站内乘客运动规律研究[D].青岛:青岛大学,2022.
[6]张媛媛,朱国庆,李利敏.徐州地区学生肩宽统计及安全疏散分析[A].2013中国消防协会科学技术年会论文集[C].北京:中国科学技术出版社,2013:563-567.
[7]陈亮宇.汽车客运站行人交通行为特征与仿真研究[D].福州:福州大学,2020.
[8]张奕莹,蒋自杰,李帆.基于信息熵的安全标识信息有效性评价模型[J].武汉理工大学学报(信息与管理工程版),2020,42(01):17-22.
[9]唐丝雨.考虑分心步行的地铁通道行人社会力模型与仿真研究[D].北京:北京交通大学,2022.
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/guanlilunwen/78016.html