【摘要】为了从交通公平性的角度解决平面过街横道的信号配时问题,避免配时结果偏向于机动车,文中首先通过采集平面过街横道几何参数以及交通流量数据,统计获得第15%位行人过街步速;然后基于双环相位结构,考虑相位绿灯时长、行人过街、信号周期等约束条件,以机动车和行人的平均延误之差和机动车平均延误最小为目标,建立平面过街横道的信号配时多目标优化模型,并设计遗传算法求解该模型;最后将求解得到的各种信号配时方案进行对比分析。结果表明:以机动车延误或总平均延误最小为目标,不能得到合理的信号配时结果;当机动车与行人平均延误之差的权重在0.3~0.9时,可以得到两种合理的信号配时结果。因此,以交通公平性为导向的平面过街横道信号配时方法,兼顾了公平性和高效性,在公平地对待每一个交通参与者的同时,也有效地提高了平面过街横道处的通行效率和质量,有利于更公平地分配交通资源,引导交通资源布局向合理化方向发展。
【关键词】交通工程,信号配时设计,遗传算法
交通公平性是一个复杂且多维度的概念,涉及到地理、经济、社会、文化和政治等诸多方面因素的综合影响。从个体的出行需求到整个城市的交通规划,交通公平性都扮演着关键角色。Litman[1]曾对交通公平性做出了较为全面的诠释,其将交通公平性分为横向公平性、考虑不同社会阶层和收入差异的纵向公平性、考虑交通能力和需求差异的纵向公平性三个方面。因此,他认为实现交通公平是实现社会公平的基本要求[2]。Mayell[3]提出“以行人为先,推进气候、安全和公平目标”,以促进构建更加环保、安全和公平的城市环境。林晓言等[4]认为,交通是社会经济发展的关键。对待交通公平问题需要从人民群众基本出行需求、国民经济不同发展阶段以及代际公平的角度出发,审视交通与经济的适应性关系。交通公平性的研究追求的不仅仅是交通资源的平等分配,还包括对不同交通参与者需求的尊重和满足。为了实现在交通领域中的社会公平,需深入考虑如何公正地处理资源和权利的分配问题。在此背景下,交通信号配时问题成为了确保交通流畅和平等的关键环节,它不仅是技术挑战,也是公平原则在现实操作中的体现。
交通信号配时优化一直是交通领域中备受学者关注的热门问题,合理的信号配时策略有助于减少不同方向车流的冲突,提高车流的通行效率并保障交通安全。近年来,在信号配时方面,Jovanovi等学者研究了单点交叉口处于欠饱和、过饱和等情况下的信号配时优化问题。首先,基于蜂群优化算法(Bee Colony Optimization,BCO),以机动车平均延误最小化为优化目标,得出单点交叉口的最佳周期和各相位时长[5];而后,为克服没有考虑交通安全因素的局限,提出利用多目标优化方法,设置交叉口交通安全风险指数最小化的优化目标来改进信号配时优化结果[6]。然而,两项研究均没有体现出行人的交通利益。基于此,Jovanovi,Teodorovi又提出了一种权衡车辆和行人延误的优化算法,构建了一个新的信号配时优化模型,并通过算例验证了模型的有效性[7]。目前,对信号配时方面的研究不仅专注于传统的人工驾驶车辆,还包括针对自动驾驶车辆的研究[8]。另一些学者不仅考虑了机动车产生的延误,还综合考虑了机动车燃油消耗对环境的影响,并结合这些因素进行信号配时优化[9]。
在鼓励绿色交通的政策背景下,交通设计和管理部门越来越重视行人的路权。基于此,一些学者逐步突破以优化机动车效率为主的研究范式,考虑了在实施机动车“礼让行人”管控方式下的信号配时及通行效率问题。虞笑晨等[10]通过对不同类型交叉口进行实地调查,运用可接受间隙的概念分析驾驶人在交叉口的行为。结果表明,机动车礼让行人能提高交叉口安全性,然而过度让行会对通行效率产生负面影响。Wang等[11]研究“礼让行人”政策实施对行人过街行为的影响,结果表明,通过强化政策执行力度,可以有效改变行人与车辆之间的竞争行为,保障行人安全。反之,则会加剧车辆与行人之间的冲突,因此唯有保持政策执行力度,才能有效改善行人安全问题。任耀等[12]为提高机动车“礼让行人”背景下的人车通行效率,从行人信号早启时间确定方法、人车绿时分离设置条件等环节给出了具体的信号配时优化方法。而后,也有一些学者考虑了更多与行人过街效率或安全相关的影响因素,对现有的研究模型进行了一些改进。Yu等[13]引入一种以车辆与行人总加权延误最小化为目标的信号配时优化方法,研究结果表明,该方法在二次过街人行横道上效率更高,车辆与行人总加权延误更小。Zhang等[14]以车辆延误和行人过街风险最小为优化目标,通过两种具有修复机制的进化算法(GA和HS),构建了一个基于行人和车辆混合交通流网络的宏观模型。研究结果表明,随着过街行人数量的增加,车辆延误也在增加,但主要受交叉口车流量的影响,同时提高交叉口安全性会造成一定的车辆延误。杨震等[15]基于3种行人保护策略,建立了以最小化信号周期及行人与右转机动车冲突数量的交叉口信号配时优化模型。Karimpour等[16]研究发现,行人的失望程度随着其延误的增加而增加,并可能导致其违反交通规则。为解决这一问题,他们提出了一种有限混合建模方法,利用智能传感器收集的高分辨率事件数据估计行人延误,并做出优化调整,以更好地满足行人的需求。Chen等[17]考虑了行人在路侧和安全岛等待过街时的物理排队长度,提出了一种改进的二次过街交叉口行人延误模型,并利用VISSIM仿真对所提模型与现有模型进行对比验证,研究结果表明该方法可以显著提高行人第二阶段过街延误的估算精度。
基于以上研究背景,本文将重点研究交通公平性导向的单点信号配时优化问题。单点信号配时包括交叉口和路段平面过街横道信号两个层面,其中对于路段平面过街横道,由于机动车交通量远大于行人,以机动车或全体平均延误最小化为目标的配时策略容易导致配时结果偏向于机动车,造成行人过街延误过大。基于此,本文以机动车和行人的交通公平性为导向,将延误公平性作为交通公平性的测度,使用美国电气制造商协会(National Electrical Manufacturers Association,NEMA)在TS-2标准中提出的环-分界双环相位结构[18],从交通公平性角度建立新的平面过街横道信号配时设计方法,对现有的信号配时理论进行完善,为行人过街的信号配时优化设计提供新思路,有利于更公平地分配交通资源,引导交通资源布局向合理化方向发展。
1平面过街横道数据采集
1.1现状渠化信息
本文研究的平面过街横道位于龙蟠路与锁金南路的交叉处,其几何形态及关键几何参数如图1所示。其中,南北方向为交通主干道龙蟠路,限制车速为60 km·h-1。东西方向为支路锁金南路,由于该方向机动车流量很少,因此可视为仅有行人通行。
1.2交通数据采集
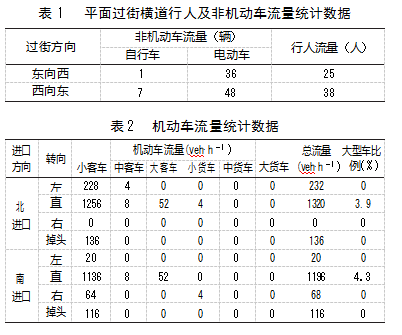
录制该平面过街横道的视频,统计工作日晚高峰17:00-18:00的过街行人流量以及机动车流量数据,如表1、表2所示。
通过视频分析工具KMplayer获得平面过街横道的行人过街步速数据(不考虑违规过街行人的步速),绘制行人速度累计分布图,如图2所示。根据图2,第15%位行人过街步行速度为1.32m/s。
1.3现状信号相位方案
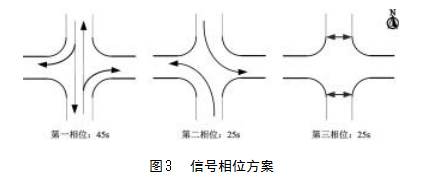
根据视频资料,平面过街横道现状信号相位方案为三相位方案,第三相位可看作行人过街相位。如图3所示,现状交叉口信号控制周期时长为104s,三个相位绿灯时间依次为45s、25s、25s,黄灯时间均为3s。
2模型建立
2.1符号定义
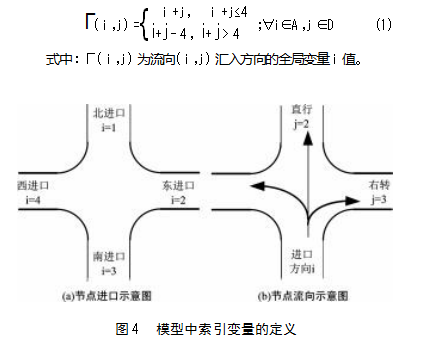
如图4所示,设i为道路节点进口方向的全局索引变量,A为节点进口方向的集合,且A={1,2,3,4},其中i=1表示北进口,其余进口按照顺时针方向依次编号[19];设j为节点流向的局部索引变量,D为节点流向的集合,且D={1,2,3},对任意进口方向i,j=1表示进口方向i的左转流向,其余流向按照顺时针方向依次编号[19]。变量i和j的转换关系如下所示:
2.2相位设计
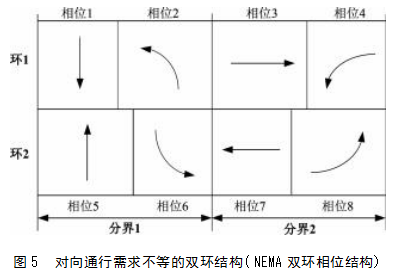
本文在信号配时优化中采用NEMA双环相位结构,如图5所示,八个相位被分成两个环,每个环由时间上连贯但不兼容的冲突相位按照一定顺序排列而成,而处于不同环的相位必须在分界处同时结束。在满足环和分界的约束条件时,每个相位的长度都可以不尽相同。如图5中,相位1和相位5的时长可以不同,相位2和相位6必须同时结束。这种相位结构与传统四相位相比,能够更灵活地适应交通流分布的不均衡性。
本文将NEMA双环相位结构应用于所研究的龙蟠路-锁金南路平面过街横道处,可得到由五个信号相位组成的双环结构图,如图6所示,其中屏障2用于行人过街。Φ(i,j)表示进口方向i流向j的时长(单位:s),Φp表示行人过街相位时长(单位:s)。
2.3约束条件
2.3.1相位绿灯时间约束条件
从行车安全角度考虑,为保证驾驶人对信号灯显示的变化有足够的感知时间,各相位绿灯时间不宜过短,相应的约束条件如下:
式中,G(i,j)表示进口方向i流向j的显示绿灯时间(单位:s),G(i,j),min表示进口方向i流向j的显示绿灯时间的最小值,本文将机动车相位的G(i,j),min取为10s。
由于图6中屏障2为行人过街相位,因此其绿灯时间Gp必须大于行人安全穿越道路所需最短时间,根据《Highway Capacity Manual》[20]的规定,采用式(3)来约束行人过街所需最短绿灯时间:
式中,L为平面过街横道的长度(单位:m),根据图1取32.25m;Ip为行人过街相位的绿灯间隔时间(单位:s);vp为第15%位行人过街步速,根据图2取1.32m·s-1。
2.3.2环-分界约束条件
各相位运行时间等于相位显示绿灯时间G(i,j)与相位清空时间I(i,j)之和,或相位有效绿灯时间g(i,j)和相位损失时间l(i,j)之和,各相位运行时间Φ(i,j)应满足以下条件:
根据NEMA双环相位的结构特点,每个屏障内的双环时长需相等,并且各相位的运行时间之和应等于信号周期时长C。由于本文屏障2中只有一个相位,因此需保证:
2.3.3延误约束条件
①车辆延误。
设k为进口方向i流向j的车道组索引变量,其中k=1表示最内侧车道组,其余车道组由内向外按顺序编号,设进口方向i流向j的车道组集合为Ki。使用dijk1、dijk2、dijk依次表示进口方向i流向j第k个车道组的均衡延误、过饱和延误和总延误(单位:s),根据《Highway Capacity Manual 2010》[20]可知,各车道组的延误可用式(7)-(9)计算:
其中,gij表示进口方向i流向j对应相位的有效绿灯时间(单位:s);T表示研究时段的持续时长(单位:s);xijk、Q ijk分别表示进口方向i流向j第k条车道或第k个车道组的饱和度和通行能力(单位:veh/h),两者的计算方法分别如式(10)(11)所示:
式中,yijk、Sijk分别表示进口方向i流向j第k个车道组的流量比、饱和流量(单位:veh/h);λij表示进口i流向j的绿信比。
②行人延误。
图7为行人延误示意图,红灯期间过街行人在路侧聚集,直到绿灯启亮后,行人开始过街,因此将行人在路侧等待绿灯开启而产生的延误记为d1。与机动车延误不同,由于绿灯相位启亮后行人一般同时起步,消散时间较短,故本文忽略行人消散时间。在行人相位绿灯末期(如绿闪阶段),由于绿灯时间所剩无几,行人出于安全考量决定暂不过街,会产生绿灯末的损失时间lP1。
大部分行人在完成第一阶段过街后,通过安全岛可以顺利完成二次过街。然而,少部分行人由于到达路侧时机、步行速度等原因,在完成了第一阶段过街后无法完成第二阶段,需要在安全岛上等待下一个行人相位绿灯开启,将这部分延误记为d2,即在安全岛上等待下一个绿灯开启而产生的延误。
因此,行人延误dp共由两部分组成,通过式(12)-(14)
计算:
式中,C为信号周期时长(单位:s);R为行人相位的红灯时间(单位:s);lP1为第一阶段过街绿灯末损失时间(单位:s),本文取5s;lP2为到达安全岛后绿灯末损失时间(单位:s),本文取3s。
2.4目标函数
为体现交通公平性,模型以行人和机动车平均延误之差最小和机动车延误最小为两项优化分目标,对应的目标函数如式(15)(16)所示:
其中,z1表示行人和机动车平均延误之差(单位:s),z2表示机动车平均延误(单位:s),qijk表示进口方向i流向j第k个车道组的机动车流量(单位:pcu·h-1)。
3模型求解及结果对比
以式(1)-(14)为约束条件,式(15)(16)为目标函数,构成了本文以交通公平性为导向的平面过街横道信号配时多目标优化模型。根据2.3节可知,此模型优化变量主要为各相位的有效绿灯时间gu和信号周期时间C,变量较多且包含非线形约束条件,传统的解析法难以获得最优解,因此本文采用遗传算法求解此模型。
3.1遗传算法求解步骤
①编码方式的确定。
假设将每一种信号配时方案看作一个个体,各个相位的有效绿灯时间看作个体内部的基因片段。因本文采用双环相位的信号控制方式,故可将有效绿灯时间的基因片段表示为:g11,g12,…,g31,g32,每个基因片段按二进制编码进一步转换为二进制串:bu1,bu2,…,buv,…,bun。其中,buv表示第u个基因片段(u∈P)第v位的二进制编码(v∈{1,2,…,n}),u表示相位索引,P为相位的集合,且P={1,2,…,5},n表示二进制串的长度。遗传算法相应的基因选择、交叉、变异等操作在二进制串上进行,获得的二进制串通过式(17)转换为十进制数:
其中,tu为十进制表示的第u相位有效绿灯时间;tumin、tumax分别表示第u相位有效绿灯时间的最小值和最大值。
②适应度函数的选取。
选取模型两个目标函数之和的倒数,即F=1/(αz1+βz2)
作为适应度函数,其中α和β分别是分目标机动车与行人平均延误之差、机动车延误的权重系数,并且α+β=1。对于每个个体,适应值越大,表明其在该环境下的生命力越强,即对问题的解决效果较好,因此适应值越大的个体出现在后代的可能性越大。
③确定选择策略。
在本文中,选择锦标赛算子作为选择策略,在每一代种群中随机选择2个个体,对其适应值进行比较,适应值较大的个体将会作为下一代的父体。
④确定遗传算子。
对于遗传算子,选取单点杂交算子由父代生成子代,再通过变异算子以一定的变异概率将子代的某个二进制位取反。
⑤选取遗传控制参数。
经过多次调试,本文选取的遗传控制参数如下:种群规模取值为200,变异概率取值为0.6,最大迭代次数为1000。根据这些参数不断地对种群进行选择、交叉、突变等操作,直至达到预设的迭代次数,此时最优解保存在最后进化后的种群中。
3.2模型求解结果及对比
本文选取10组不同权重系数优化信号配时方案,并将总平均延误最小的优化目标设为对照组。模型中除遗传控制以外的参数选择如下:各相位损失时间lu取3s,机动车相位的tumin取10s,行人相位的tumin取29s,各相位tumax取100s,二进制串的长度n取7。使用Python3.8运行遗传算法程序,得到信号配时优化结果,如表3所示。
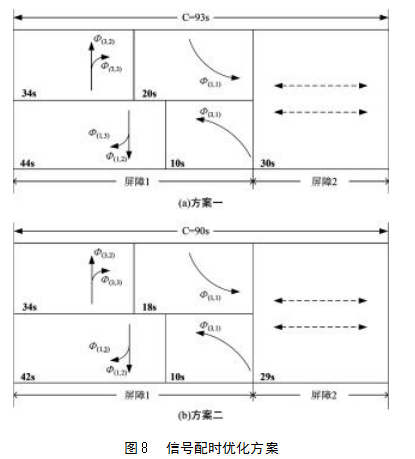
表中α=0,β=1表示只对机动车延误最小化,不考虑行人延误的优化目标;总平均延误最小是将机动车与行人视为一个整体,寻求整体延误最小化。由于机动车数量远大于行人,因此两者均偏向于使机动车延误最小化,不能得到合理的信号配时结果。随着α的增大,模型的优化目标更偏向于使机动车和行人的平均延误之差最小化。当机动车与行人平均延误之差的权重在0.3~0.9时,虽然机动车延误有所升高,但行人延误得到显著降低,二者的延误之差均趋近于0,且行人延误和机动车延误均小于优化前的数据,既优化了交通效率,又体现了交通公平性,因此可以作为本文的信号配时优化方案。综合考虑表3的模型求解结果,选择两组信号配时作为本文的优化方案,如图8所示。
将优化后的两种信号配时方案进行对比,如表4所示。
从图8和表4可以看出,本文得到的两种优化方案结果近似。方案二中,北进口左转相位(Φ(1,1))及直行右转相位(Φ(1,2),Φ(1,3))时长均比方案一少2s,行人过街相位时长也比方案一少1 s。两优化方案同时降低了行人和机动车的平均延误,且延误之差均趋近于0,差异可忽略不计,但方案二的信号周期时长比方案一更短,既优化了交通效率,又体现了交通公平性,因此方案二略优于方案一,可以作为本文的信号配时优化方案。
4结语
本文以南京市玄武区龙蟠路-锁金南路平面过街横道为例,以相位绿灯时间、信号周期时长、行人过街最短时间等为约束条件,以机动车和行人平均延误之差和机动车平均延误的加权最小化为目标函数,建立了平面过街横道信号配时优化模型。模型通过机动车与行人平均延误之差最小化来实现对交通参与者的公平对待,即给予机动车、行人同等的重视,通过机动车平均延误最小化来保证机动车通行效率,两项目标函数结合得到以交通公平性为导向的信号配时优化模型,随后设计遗传算法求解该模型得到信号配时的优化结果,得到以下主要结论。
①由于平面过街横道处的机动车数量远大于行人,因此信号配时优化如果以机动车平均延误最小或全体平均延误最小为目标,所获得的结果均偏向于使机动车延误最小化,不能得到合理的信号配时结果。
②当机动车与行人平均延误之差的权重α在0.3~0.9时,与以机动车平均延误最小或全体平均延误最小为目标的优化方案相比,虽然机动车延误有所升高,但行人延误显著降低,且二者均小于优化前的数据,既优化了交通效率,又体现了交通公平性,因此可以作为本文的信号配时优化方案组。
③本文得到的两种优化方案结果相似,机动车与行人延误之差均趋近于0,分别为0.0210s和0.0377s,二者差异可忽略不计。由于方案二的信号周期时长比方案一更短,因此方案二略优于方案一。
因此,以交通公平性为导向的信号配时方法更有利于兼顾公平性和高效性,在保证机动车交通流正常运行的同时,也能够有效提高行人过街的效率和质量,促进行人过街的安全,更有利于引导人们转变出行方式。
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/guanlilunwen/78005.html